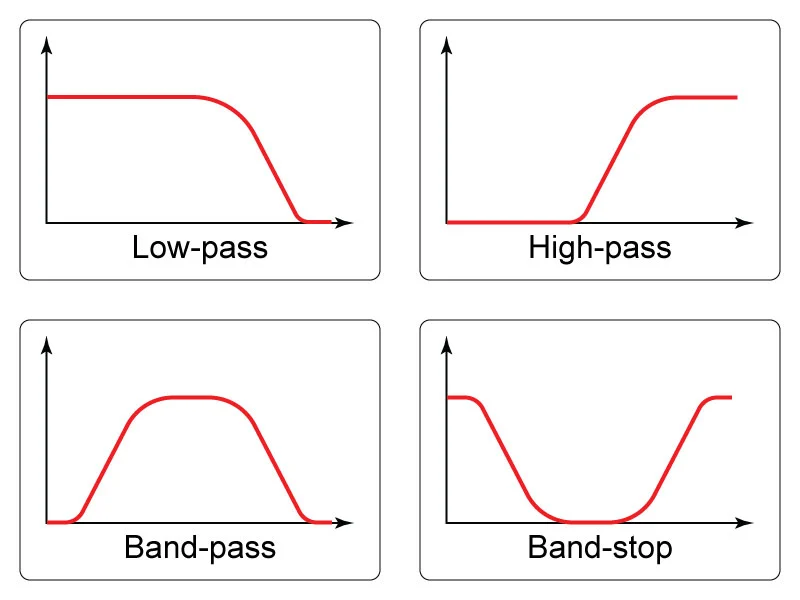
고주파 통과 필터
기본적으로 모든 신호, 데이터는 다음과 같은 방정식이 성립하게 된다.
측정값 = 참값 + 잡음
이를 통해 다음과 같은 방정식이 성립함을 알 수 있다.
참값 = 측정값 - 잡음
저주파 통과필터가 측정값-잡음의 참값을 출력했다면 반대로 고주파 통과필터는 잡음만을 추출해 내는 필터이다. 저주파 통과 필터나 고주파 통과 필터처럼 주파수의 관점에서 설계하는 필터는 대부분 라플라스 변환에 의해 그 특성을 파악하게 된다. 고주파 통과 필터의 전달 함수(transfer function)은 다음과 같다.
1.1
1.2
1.3
로 정의되므로 가 0에 가까워지면 가 0이 되어 출력신호인 를 차단시키고, 가 에 가까워지면 가 1에 가까워져 입력신호 가 그대로 출력되는 것을 직관적으로 확인할 수 있다. 이를 코드로 작성하기 쉽게 만들기 위해 frequency domain에서 time domain으로 역변환 과정을 거치는 방법은 다음과 같다.
1)
분자와 분모 모두 로 나눈다
2)
로 치환한다
3)
4)
라플라스 역변환을 실행한다.
5)
연속신호를 이산화한다.
6)
양변에 를 곱하고 정리한다.
최종적으로 로 치환하면 다음과 같은 형태를 띄게 된다. LPF와 달리 현재의 입력값 외에 직전 입력값이 필요하다는 차이점이 존재한다.
Highpass Filter
Lowpass Filter
코드
function xhpf = HPF(u)
persistent prevX prevU
persistent dt tau
persistent firstRun
if isempty(firstRun)
prevX = 0;
prevU = 0;
dt = 0.01;
tau = 0.0233;
firstRun = 1;
end
alpha = tau / (tau + dt);
xhpf = alpha*prevX + alpha*(u-prevU);
prevX = xhpf;
prevU = u;결과
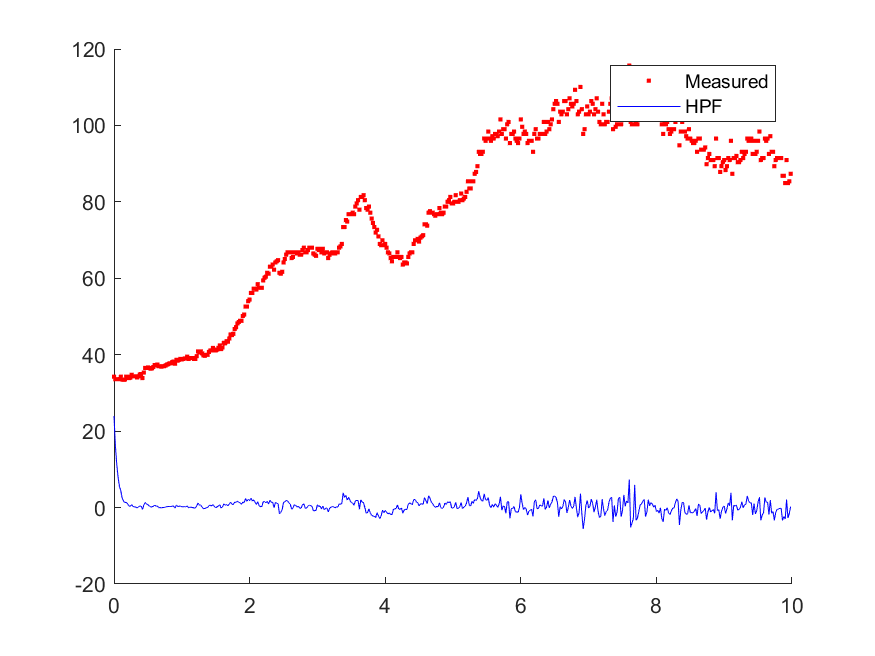
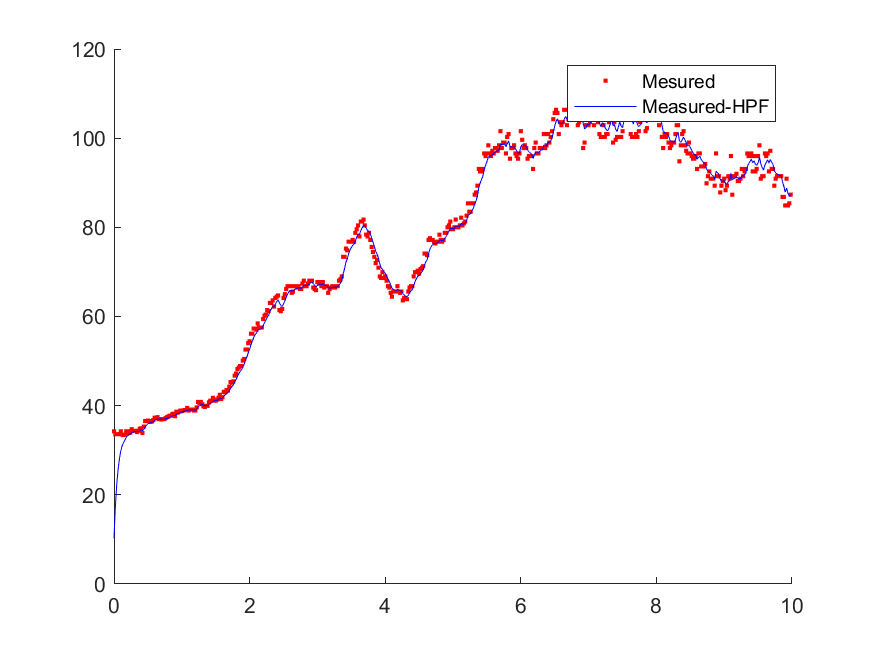
측정 신호값에서 HPF를 통과시켜 측정한 노이즈가 측정되었다. 위에서 정의한 참값 = 측정값 - 잡음에 의해서 측정값에 HPF로 측정한 노이즈를 뺀다면 참값을 얻을 수 있다. 이에 대한 결과는 아래의 그림과 같다.
참고
칼만 필터는 어렵지 않아 - 김성필 저, 한빛아카데미

칼만필터 여전히 어려운데여..!