초간단 칼만 필터 예제
칼만 필터를 이용한 첫번째 예제는 '14V의 전압이 일정하게 출력되는 배터리의 노이즈를 제거'하는 것이다. 칼만 필터를 이용하기 위해서 가장 먼저 시스템 모델을 정의한다.
시스템 모델 설정
1.1
1.2
1.1을 먼저 살펴보자. DC배터리의 전압은 일정하게 유지되므로 이전 스텝의 상태변수와 다음 스텝의 상태변수가 같다. 또한 Measurement value인 의 경우 State variable인 와 Measurement noise인 의 합으로 나타낼 수 있다. 이에 따라 칼만필터의 파라미터는 다음과 같이 정의된다.
가장 먼저 의 경우 2.1의 상태방정식에서 증명할 수 있다.
2.1
2.1의 상태방정식과 1.1을 비교해보면 이라는 사실을 알 수 있으며 또한 시스템 잡음인 항이 존재하지 않으므로 이다. 따라서 는 의 공분산 행렬인데 이것이 존재하지 않으므로 0이되는 것을 알 수 있다. 두번째로 의 경우 3.1의 식에서 확인할 수 있다.
3.1
3.1과 1.2를 비교하면 마찬가지로 이라는 것을 알 수 있으며 의 경우 Measurement noise인 의 공분산 행렬인데 의 분포를 가지므로 이에 따라 스칼라 값인 로 결정된다. 최종적으로 이를 확인하기 위해 칼만 필터의 알고리즘에 따라 초깃값을 다음과 같이 선정하였다.
알고리즘
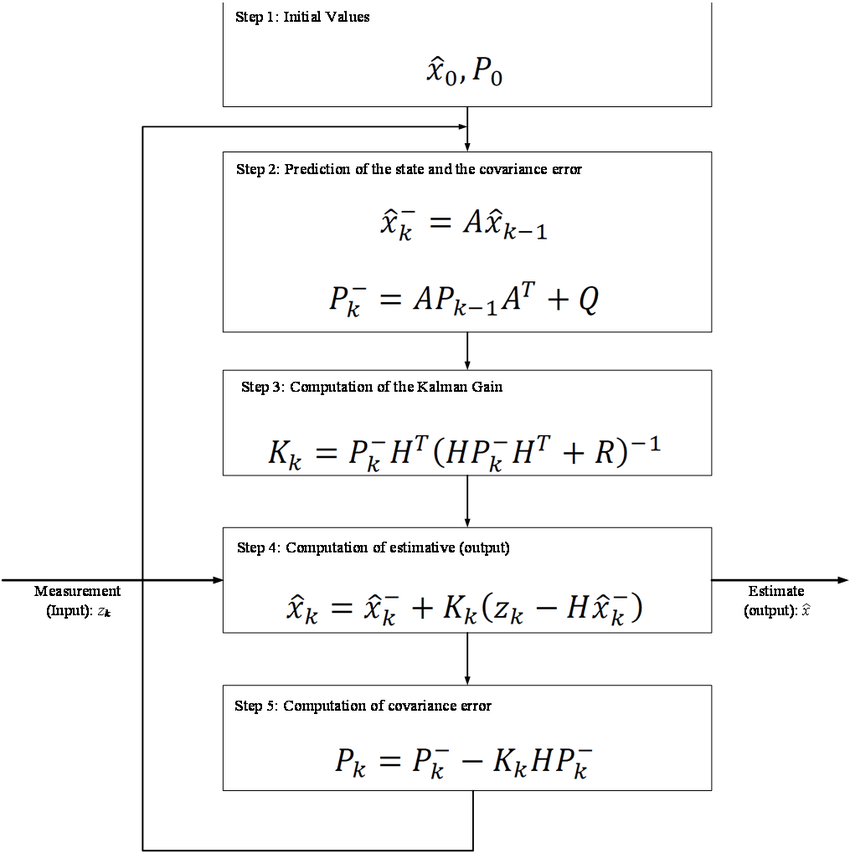
칼만 필터의 블록 다이어그램은 위의 사진과 같다. 이를 토대로 코드를 작성했다.
코드
function [volt, Px, K] = SimpleKalman(z)
%{
System Model
x_(k+1) = x_k (배터리의 전압이 일정하게 유지되므로 이전상태와 현재상태가 동일)
z_k = x_k + v_k (Measurement Value = State Variable + Measurement Noise)
x_0 = 14 (Initial State Value = 14)
v_k ~ N(0, 4) (Normal Distribution, mean = 0, variance = 4)
%}
persistent A H Q R
persistent x_hat P
persistent firstRun
if isempty(firstRun)
A = 1;
H = 1;
Q = 0; % w_k(시스템 잡음)의 공분산 행렬(Diagonal Matrix)
R = 4; % v_k(센서 측정 잡음)의 공분산 행렬(Diagonal Matrix)
x_hat = 14; % x_0(Initial Value)
P = 6; % P_0 (Initial Error Covariance)
firstRun = 1;
end
% Prediction
x_pred = A * x_hat;
P_pred = A*P*A' + Q;
% Calculate Kalman Gain
K = (P_pred*H')/(H*P_pred*H' + R);
% Update
x_hat = x_pred + K*(z - H*x_pred);
P = P_pred - K*H*P_pred;
% return Estimated State Value & Error Covariance
volt = x_hat;
Px = P;
end결과
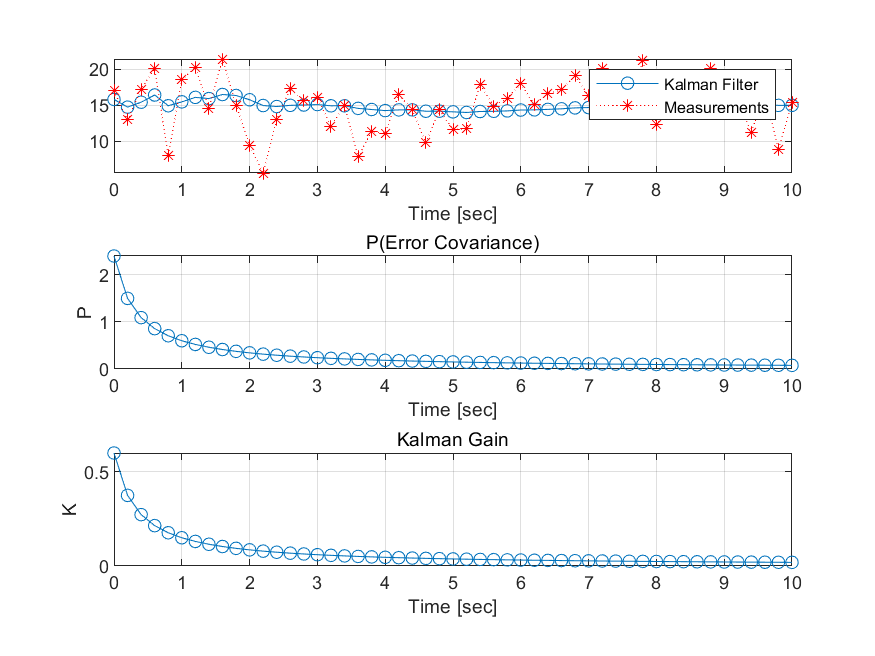
시간이 흘러감에 따라 효과적으로 노이즈를 제거하면서, 동시에 오차 공분산값인 와 칼만 이득값인 가 작아지는 것을 확인할 수 있다. 결론적으로 오차 공분산이 줄어든다는 것은 추정값의 오차가 감소하는 것을 의미한다. 또한, 칼만 이득이 작아짐에 따라 새로운 추정값인 는 예측값인 의 영향이 작아지고 이전 예측값 즉, 의 영향이 커지게 된다. 결국 이전 추정값의 영향을 더 받게 된다는 의미이다.
참고
칼만 필터는 어렵지 않아 - 김성필 저, 한빛아카데미
