Paint Transformer: Feed Forward Neural Painting with Stroke Prediction
Abstract
- Neural Painting: Neural Network로 주어진 이미지를 기반으로 사진 같지 않은 이미지를 stroke의 series로 재창조하는 것
- 이전 방법
- Reinforcement learning 기반 agent가 이 task를 할 수 있지만 학습시키기가 어려움
- Stroke optimization 기법은 stroke parameter의 집합을 찾는 방법을 찾음
- 효율이 낮음
- Paint transformer: 논문에서는 set prediction problem을 만들었고, transformer 기반의 framework를 제안함
- Feed forward network로 stroke set parameter를 예측함
- 거의 실시간으로 512x512 final painting 생성 가능
- Self-training pipeline 만듦, off-the-shelf dataset 필요 없음
Introduction
- 이미지 변환 모델들: pixel 단위로 처리하는 방식
- Image style transfer
- Image-to-image translation
- 사람은 stroke-to-stroke로 그림을 그림 -> 이걸 만들어보자
- stroke-to-stroke를 위한 시도들, efficiency와 effectiveness에서 개선할 부분이 많이 남음
- RNN
- Step-wise greedy search
- Reinforcement learning: 학습 시간 김
- Iterative optimization process: 학습 x, 하지만 처리 시간 엄청 김
- 논문에서는 stroke sequence generation 대신에 feed-forward stroke set prediction problem으로 재정의하여 해걸
- initial canvas와 target natural image 차이를 최소화하는 set of stroke 예측
- 큰 stroke부터 작은 stroke 까지(coarse-to-fine) K scale을 따라 진행
- robust stroke set predictor를 학습하는 게 핵심 문제
- object detection 문제와 유사함
- DETR로부터 영감 얻음
- parameters of multiple strokes with a feed forward Transformer
- object detection과 차이점: annotated data가 없음 -> self-training pipeline 제안, synthesized stroke image 활용
- Pipeline
- 배경 canvas image를 임의의 sample stroke로 합성
- 임의의 전경 stroke set을 뽑아서, target image와 가까워지도록 render 함
- stroke predictor의 목적은 synthesized canvas image와 target image의 차이를 최소화하는 것
- stroke level과 pixel level 각각 최적화 수행
- 한 번 학습되면 어떤 이미지든 활용 가능
- 주요 contributions
- 문제 정의 변경: stroke-based neural painting problem -> feed-forward stroke set prediction
- self-training strategy
- quality, efficiency 좋음
2. Related Works
2.2. Object Detection
- DETR을 선택한 이유: post-processing이 없어서
- 우리는 DETR에 binary neurons를 추가함, 대신에 input으로 2개의 이미지를 넣음
3. Methods
3.1 Overall Framework
- neural painting을 progressive stroke prediction process로 정의함
- Paint Transformer의 modules
- Stroke Predictor
- Stroke Renderer

- Fig. 2 process
- target image 와 intermediate canvas image 가 주어짐
- ??
- Stroke Predictor만 trainable parameter를 가짐
- Stroke Renderer는 미분 가능하며 parameter 없음
- 학습을 위해 randomly synthesized strokes 활용
- 학습 iteration의 process
- foreground stroke set 를 뽑고, background stroke 를 뽑음
- 어떻게?
- 넣어서 canvas image 출력
- 위에 를 render 하여 출력
- , 를 넣어서 출력
- , 넣어서 출력
- foreground stroke set 를 뽑고, background stroke 를 뽑음
-
Stroke Predictor의 objective function
-
supervision을 위한 strokes는 임의로 합성되기 때문에 off-the-shelf-dataset 필요없음
3.2 Stroke Definition and Renderer
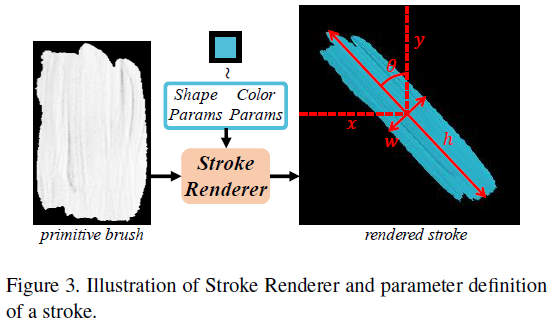
Parameters:
-
end-to-end training을 위해 미분 가능해야 함
-
Stroke Renderer
-
alpha map -> 이해 안됨
3.3 Stroke Predictor
- intermediate canvas image와 target image의 차이를 줄이는 set of strokes를 예측하는 것이 목적
- 가능하면 적은 수의 stroke로 예측하도록 함
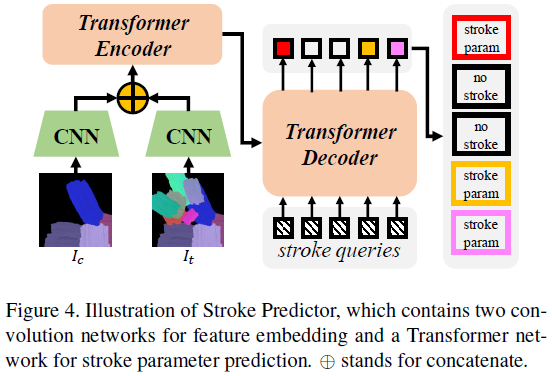
->
- Transformer encoder에 입력되는 것
- Learnable positional encoding
- Transformer decoder에 입력되는 것
- N learnable stroke query vectors
- Transforemr decoder가 출력하는 것
- Initial stroke parameters:
- Stroke confidence:
- Stroke confidence에 binary neurons를 추가함
- Forward phase 일 때, , -> 이면 , 아니면
- 는 stroke를 canvas에 그릴지 말지를 결정함
- backward phase 일 때,Sigmoid 사용
- Stroke confidence에 binary neurons를 추가함
3.4 Loss Function
Pixel Loss
Stroke Distance
- L1 distance
- L1 distance는 big, small strokes 간 scale 차이를 무시함 -> Wasserstein distance 추가
- 2D Gaussian Distribution
- Wasserstein distance between two Gaussian distributions
Stroke Loss
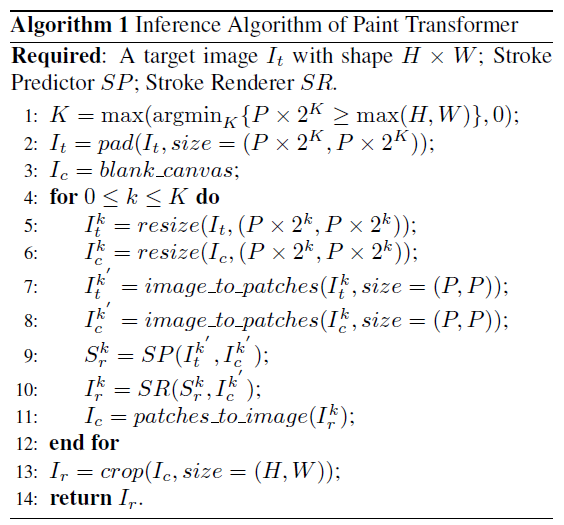
3.5 Inference

sshinohs