Signal
어떤 정보를 담고 있는 파형(waveform) 또는 데이터 열(sequence)
-
연속시간 신호 (continuous-time signal), x(t)
모든 시간 t 에 대해 정의됨(연속)
-
이산시간 신호 (discrete-time signal), x[n]
정수 인덱스 n 에서만 정의됨
Characteristic of Signal
주기 신호 : 일정한 주기 T에 대해 x(t)=x(t+nT) 만족
- 가장 작은 주기 T0 : 기본 주기(Fundamental period)
- 기본 주파수 f0 : 1/T (Hz)
- 각주파수 ω0 : 2πf (rad/s)
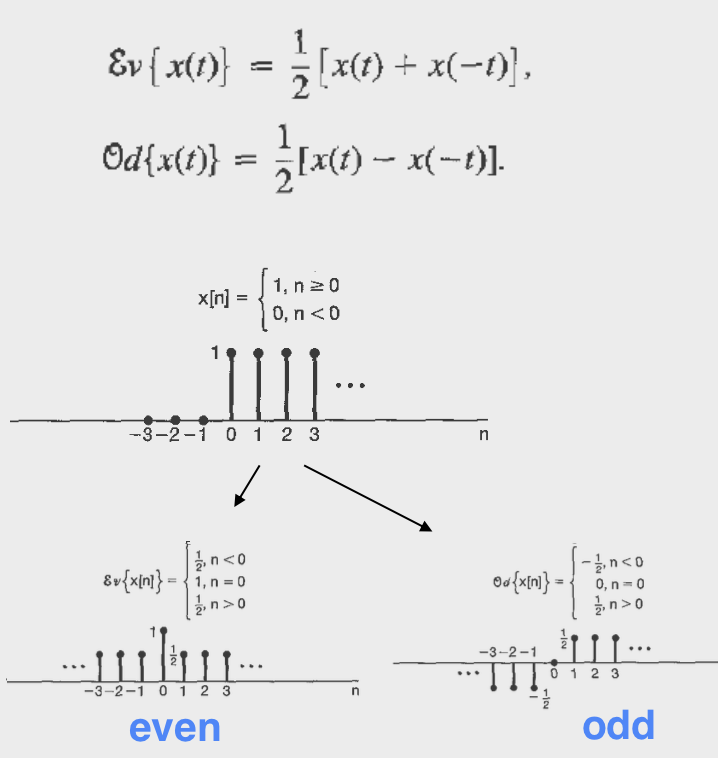
Even / Odd signal : 모든 신호는 짝수(우)/홀수(기)로 분해 가능
xe(t)=2x(t)+x(−t),xo(t)=2x(t)−x(−t).
Energy of Signal : 시간 경과에 따른 총 크기를 정량화하며, 유한한 에너지(Finite Energy)를 가진 신호를 분석하는 데 유용합니다.
Signal Modeling
시간영역 표현 vs 주파수영역 표현 (푸리에 변환)
ex. x(t)=Acos(ωt+ϕ)
System
시스템 f: 입력 x → 출력 y = f(x) (연산/필터링 등 변환).
System Modeling
물리 시스템(ex. 비디오 데이터 취득) → 회로방정식 등으로 모델링.
시간 이동(Time shift) : y(t)=x(t−t0) 일때,
- t >0 이면 지연(delayed),
- t <0 이면 진행(advanced)
시간 반전(Time reversal) : y(t)=x(−t) (ex. 음악을 거꾸로 재생)
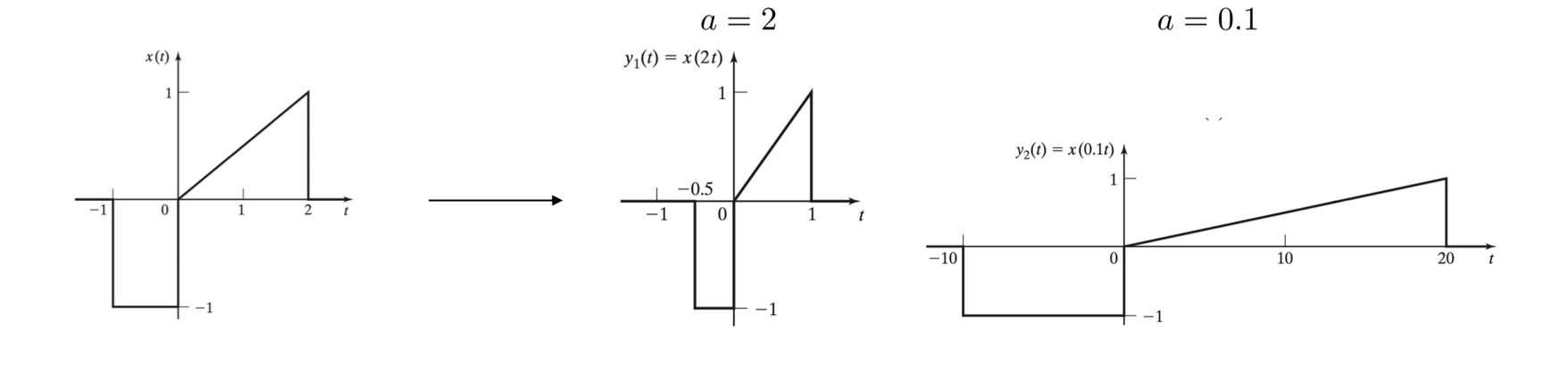
시간 스케일링(Time scaling) : y(t)=x(at)일때,
- ∣a∣>1 이면 시간 압축(compression),
- ∣a∣<1 이면 시간 확장(expansion)
시간 변환 (이동,반전,스케일링) 모두 결합 가능, 순서가 중요
ex. 스케일 후 shift : x(2(t−1))

진폭 변환 : y(t)=Ax(t)+B
- A<0 : 신호 반전
- ∣A∣ : 진폭 스케일링을 결정
- B : 진폭을 위아래로 이동
기본 신호(Basic Signals)
- 지수(Exponential) 신호
- 정현파(Sinusoidal) 신호
- 단위 임펄스 함수(Unit impulse function, Dirac delta function)
- 단위 계단 함수(Unit step function)
복소 지수 함수를 사용하여 복소 영역의 점을 표현
실수부 : 코사인파, 허수부 : 사인파
ejω0t=cosω0t+jsinω0t.
복소 지수 신호의
- 실수부 : 코사인파 cos(ωt)=2ejωt+e−jωt
- 허수부 : 사인파 sin(ωt)=2ejωt−e−jωt
ejωt=cosωt+jsinωt
(ejωt)∗=e−jωt=cosωt−jsinωt
Continuous-time 사인파, 복소 지수
연속 시간 복소 지수 신호 Ceat
: 시간에 따른 변화율이 자기 자신에 비례하는 신호
복소 지수 신호의 유형 (Ceat)
조화적으로(Harmonically) 관련된 복소지수 신호
: 한 기본 각주파수 ω0의 정수배 주파수들을 갖는 복소지수 신호 집합
xk(t)=Akejkω0t,k=±1,±2,… (k배의 frequency)
성질
- 합의 주기성
조화 집합의 합은 주기 신호가 되며, 그 주기는 기본 주파수 ω0를 갖는 사인파의 주기와 동일
일반적인 지수형 신호
x(t)=Ceat;C=Aejϕ,a=σ0+jω0
계수 C, 지수 a : 복소수
x(t) 실수·허수부
x(t)=Aejϕe(σ0+jω0)t=Aeσ0tej(ω0t+ϕ)
=Re[x(t)]Aeσ0tcos(ω0t+ϕ)+jIm[x(t)]Aeσ0tsin(ω0t+ϕ)
→ x(t) : 감쇠·성장(σ)과 진동(ω)이 결합된 감쇠/성장 사인파.
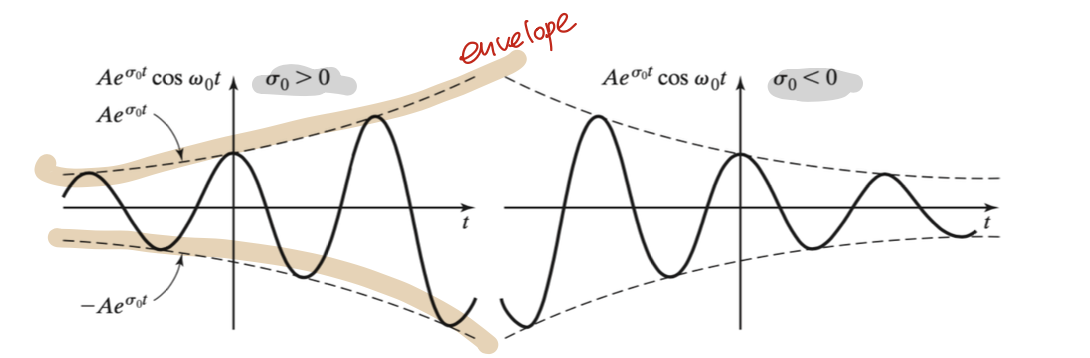
- σ>0: 진폭이 시간이 지날수록 증가
- σ<0: 진폭이 감쇠
- ω: 각주파수
discrete-time 지수·사인 신호
x[n]=Acos(ω0n+ϕ),ejω0n=cos(ω0n)+jsin(ω0n)
진폭 A, 위상 ϕ는 주기성에 영향 없음.
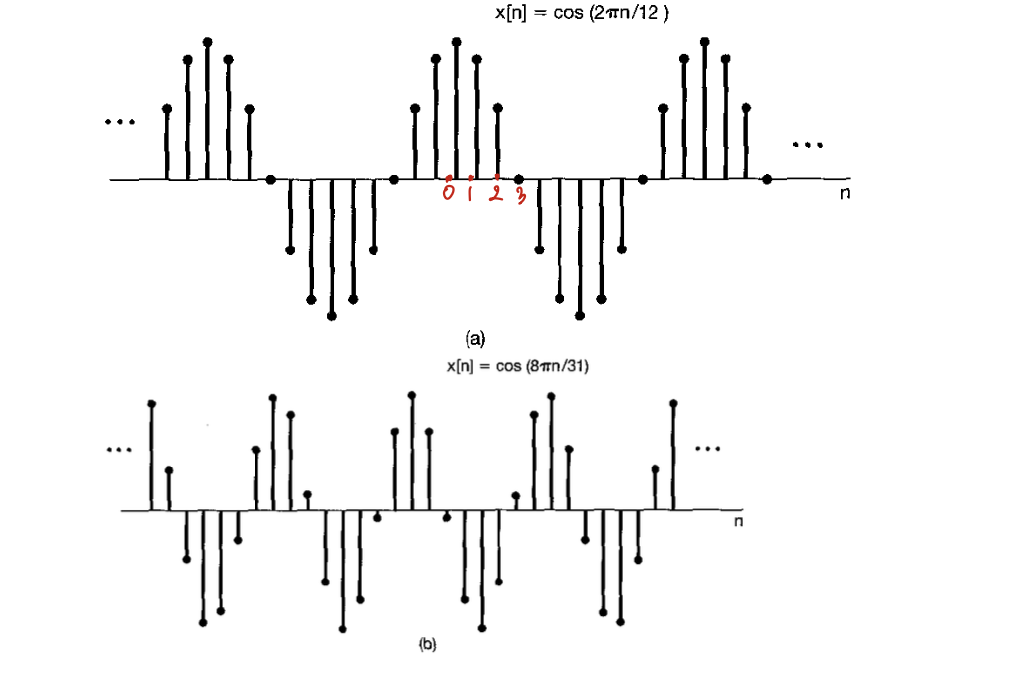
- x[n]=cos(122πn) : 12샘플마다 한 주기.
- x[n]=cos(318πn) : 31샘플마다 한 주기.
이산 복소지수의 주기성 조건
주기 N가 존재하면 x[n]=x[n+N]
N=m(ω02π).
(m은 정수)
-
x1[n]=sin(71πn)
ω0=π/7⇒ω/(2π)=1/14⇒N0=14 (주기적)
-
x2[n]=sin(71n)
ω0/(2π)=1/(14π)−π 가 무리수이므로 ⇒ 주기 함수 아님
Discrete-Time Unit Impulse (단위 임펄스) δ[n]
샘플링 성질
- x[n]δ[n−n0]=x[n0]δ[n−n0]
신호 x[n]의 n0번째 값을 뽑아줌
분해 성질
- x[n]=∑kx[k]δ[n−k]
여러 개의 임펄스를 더해 임의의 이산 신호를 재구성.
Discrete-Time Unit Step (단위 스텝) u[n]
u[n]={1,0,n≥0n<0
n=0 부터 계속 1인 계단 신호
이산 단위 임펄스 δ[n] 와 단위 스텝 u[n] 의 관계
-
차분 관계
δ[n]=u[n]−u[n−1]
스텝 신호가 n=0에서 0→1로 ‘한 칸 점프’ 하는 변화량 = 임펄스
-
누적 관계(1)
u[n]=∑m=−∞nδ[m]
n까지 등장한 임펄스들을 누적
-
누적 관계(2)
u[n]=∑k=0∞δ[n−k]
시프트된 임펄스들의 무한합
샘플링 성질
- x[n]δ[n]=x[0]δ[n].
δ[n]이 n=0에서만 1이므로 x[0]만 ‘뽑힘’
- x[n]δ[n−n0]=x[n0]δ[n−n0].
n=n0 에서만 값을 골라낸다 → 인덱스 선택기.
