Basic System Properties
-
가역성(Invertibility)
입력이 고유한 출력으로 이어지는 경우 시스템은 가역적,
역 시스템(Inverse system) 존재 -
메모리(Memory)
현재 출력이 과거 입력에 의존 -
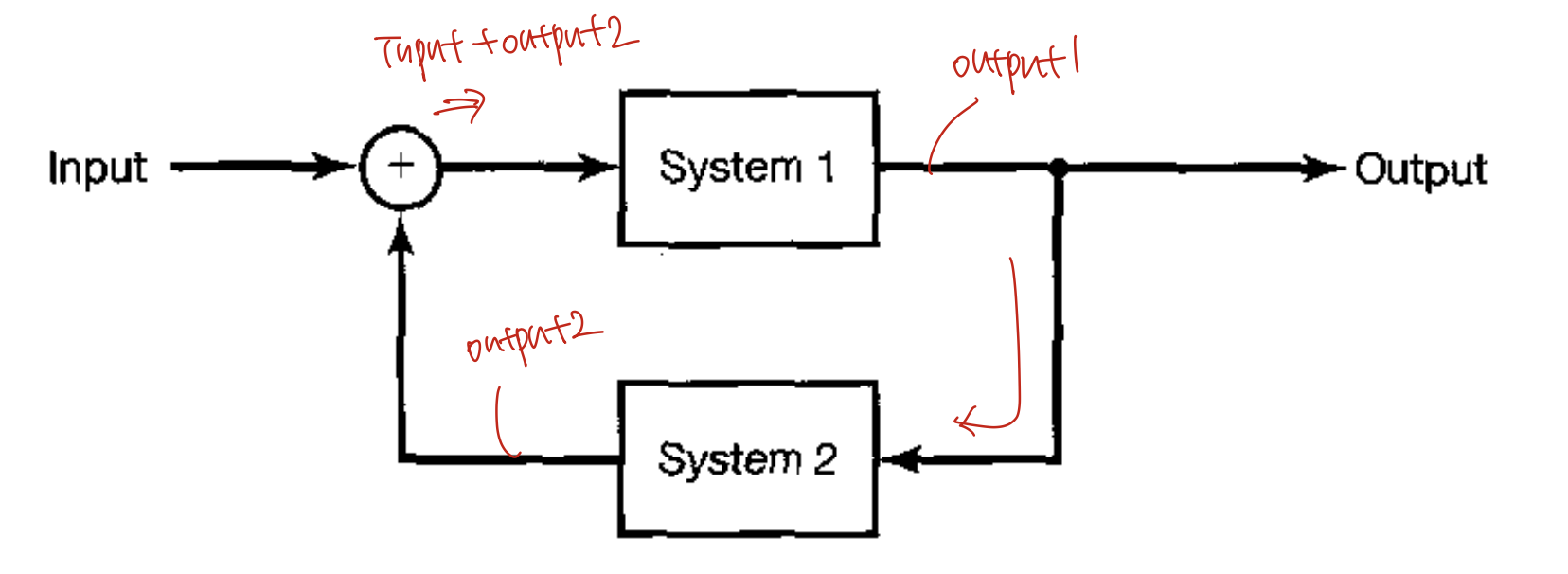
Feedback
과거 출력이 현재에 영향
-
Interconnection
시스템 간 연결 -
인과성(Causality)
출력이 현재 및 과거 시간의 입력 값에만 의존하는 경우
↔︎ 비인과적 시스템(Non-causal system)
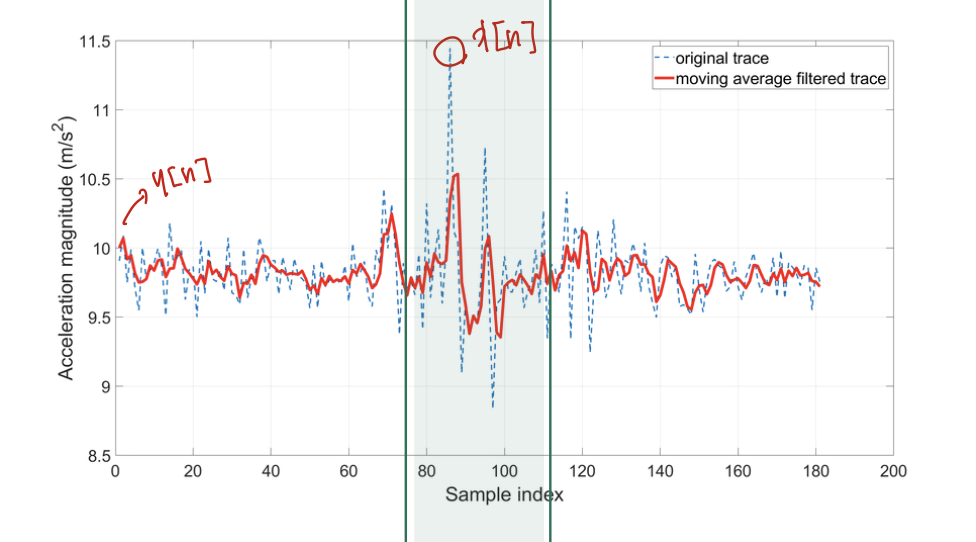
ex. 이동 평균(Moving average) : window 이동
-
안정성(Stability, BIBO)
bounded input에 대해 bounded output이 나오는 시스템 -
시불변성(Time Invariance)
시간이 지나도 고정되어 있어,
입력 신호의 시간 이동 이 출력 신호에
동일한 시간 이동 만을 야기하는 경우 -
선형성(Linearity)
입력 신호가 여러 신호( 등)의 가중 합으로 구성될 경우,
출력 역시 각 신호에 대한 시스템 응답( 등)의 가중 합
Discrete-time LTI System
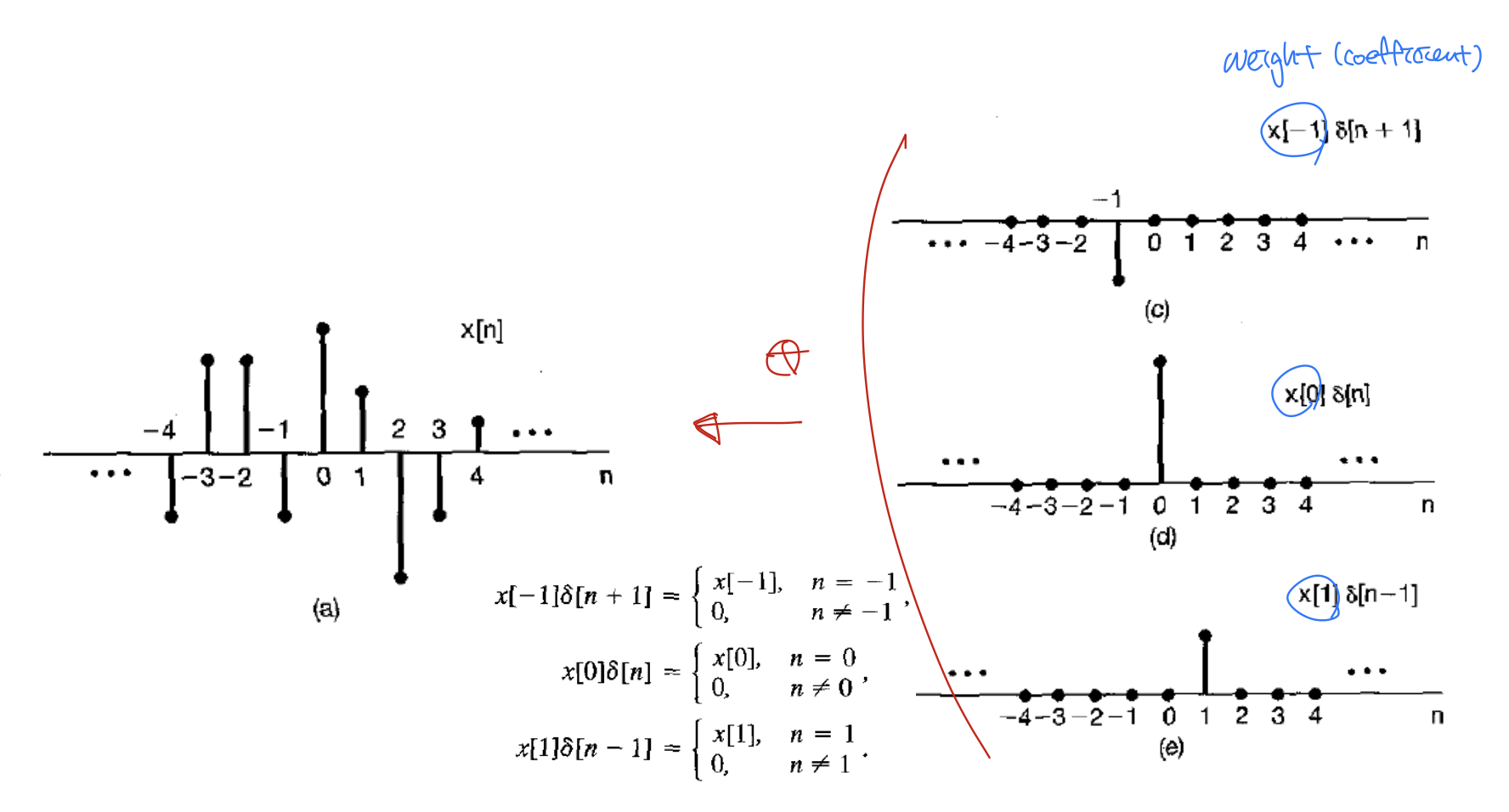
임펄스를 통한 신호 표현
이산 시간 신호 x[n]은
이동된 단위 임펄스 함수()의 가중 선형 결합으로 표현 가능.
가중치=
임펄스 응답 (Impulse Response, h[n])
h[n] : 선형 시스템이 단위 임펄스 에 반응하는 응답
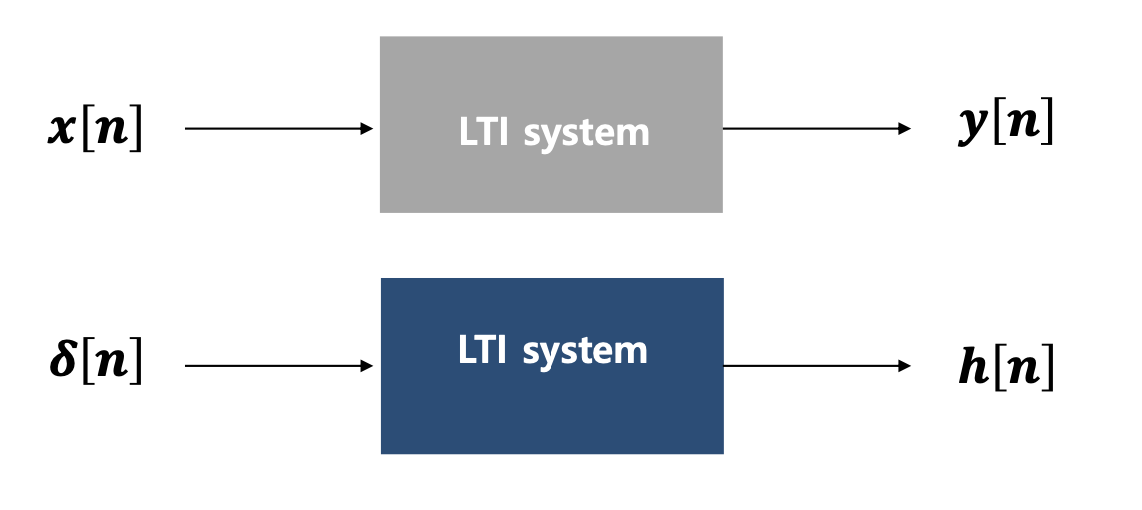
→
→
이산시간 LTI 시스템의 출력
= 입력과 임펄스응답의 선형 컨볼루션 (y=x∗h)
-
입력의 임펄스 분해:
-
출력:
컨볼루션 계산 방법:
1. 임펄스 응답 함수 h[k]를 뒤집어 h[−k]를 얻음
2. h[−k]를 n만큼 이동시켜 h[n−k]를 얻음
3. x[k]와 h[n−k]를 곱함
4. k∈(−∞,∞)에 걸쳐 모든 곱셈 결과를 합산하여 y[n]을 계산
Continuous-time LTI System
h(t) : 연속 시간 LTI 시스템의 임펄스 응답 함수.
= 단위 임펄스 δ(t)에 대한 시스템의 응답
연속시간 LTI 시스템의 출력
= 입력과 임펄스응답의 컨볼루션 적분
임펄스응답 h(t): δ(t)를 입력했을 때의 출력.
-
입력 분해(임펄스 분해):
-
컨볼루션 적분
컨볼루션 계산 방법:
1. 임펄스 응답 함수 h(τ)를 뒤집어 h(−τ)를 얻음
2. h(−τ)를 t만큼 이동시켜 h(t−τ)를 얻음
3. x(τ)와 h(t−τ)를 곱함
LTI 시스템의 속성
-
교환 속성(Commutative Property)
두 LTI를 직렬로 놓을 때 순서를 바꿔도 전체 시스템이 동일. -
분배 속성(Distribute Property)
- 결합 속성(Associative Property)
직렬 연결은 한 시스템으로 합칠 수 있음.
LTI 시스템의 안정성 (Stability)
정의: 현재 출력은 현재·과거 입력에만 의존해야 함.
필요충분 조건:
- DT: h[n]=0 for n<0
- CT: h(t)=0 for t<0
컨볼루션 범위가 줄어듦
-
DT:
-
CT:
LTI 시스템의 인과성 (Causality)
필요충분 조건:
가 bounded in magnitude 이면 도 bounded in magnitude
-
DT:
-
CT:
단위 계단 응답 (Unit Step Response, s)
스텝 응답 s: LTI 시스템에 Unit Step을 넣었을 때의 출력
- DT:
- CT:
s 와 h의 관계
-
DT:
-
CT:
선형 미분 방정식 (Linear Differential Equation)
for 연속 시간(Continuous-Time) LTI 시스템
는 입력 신호, 는 출력 신호
선형 차분 방정식 (Linear Difference Equation)
for 이산 시간(Discrete-Time) LTI 시스템
은 입력 시퀀스, 은 출력 시퀀스
