실습
- CANLINK 프로그램과 장비(한일프로텍 장비, 송수신 모듈)로 TX2 보드와의 CAN 통신 확인
- ROS 설치
ROS 용어
node : 실행 프로그램
package : 하나 이상의 노드, 노드 실행을 위한 정보 등을 묶어놓은 것
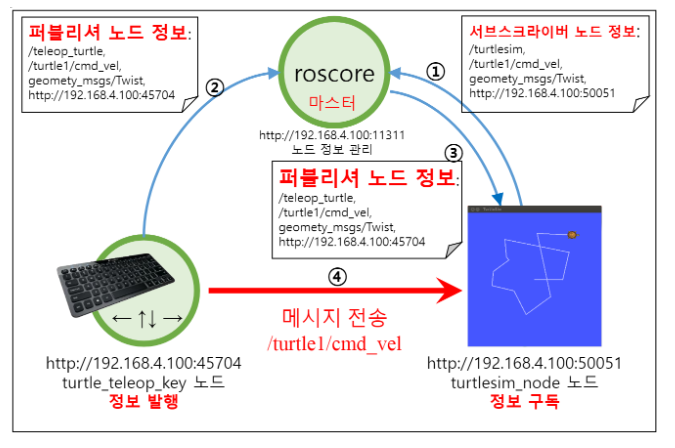
message : 메시지를 통해 노드 간에 데이터를 주고 받음
Topic, Publisher, Subscriber
Service, Service Server, Service Client
Action, Action Server, Action Client
- 메시지 통신 개념 잡기
https://github.com/katebrighteyes
ros 코드 참고 사이트
catkin_ws/src/ros_topic_test/src/ cpp 파일 2개 todo 1,2 수정
~/catkin_ws$ catkin_make
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
rosrun ros_topic_test topic_pub_test

Backend Web Developer