Imaging Geometry
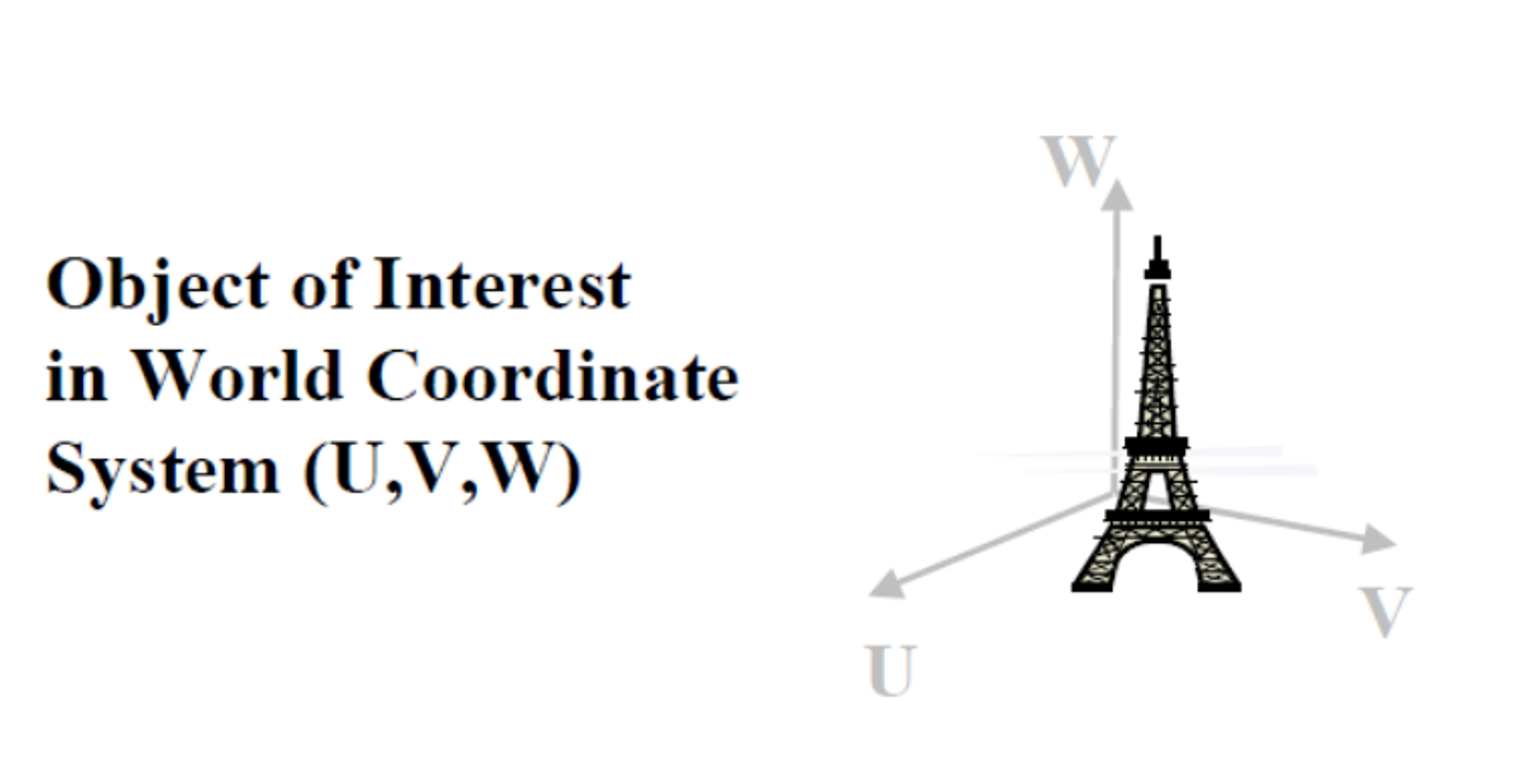
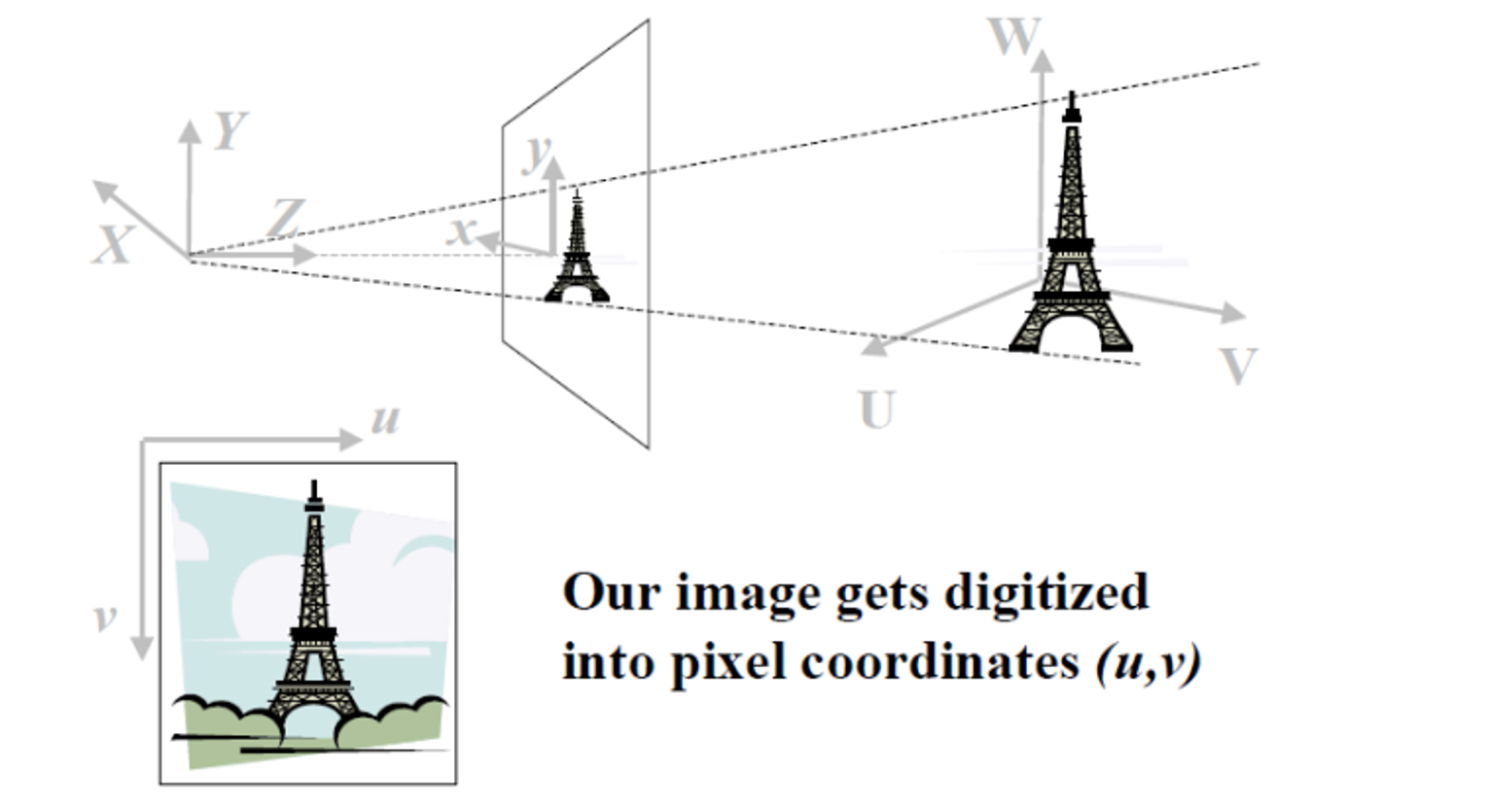
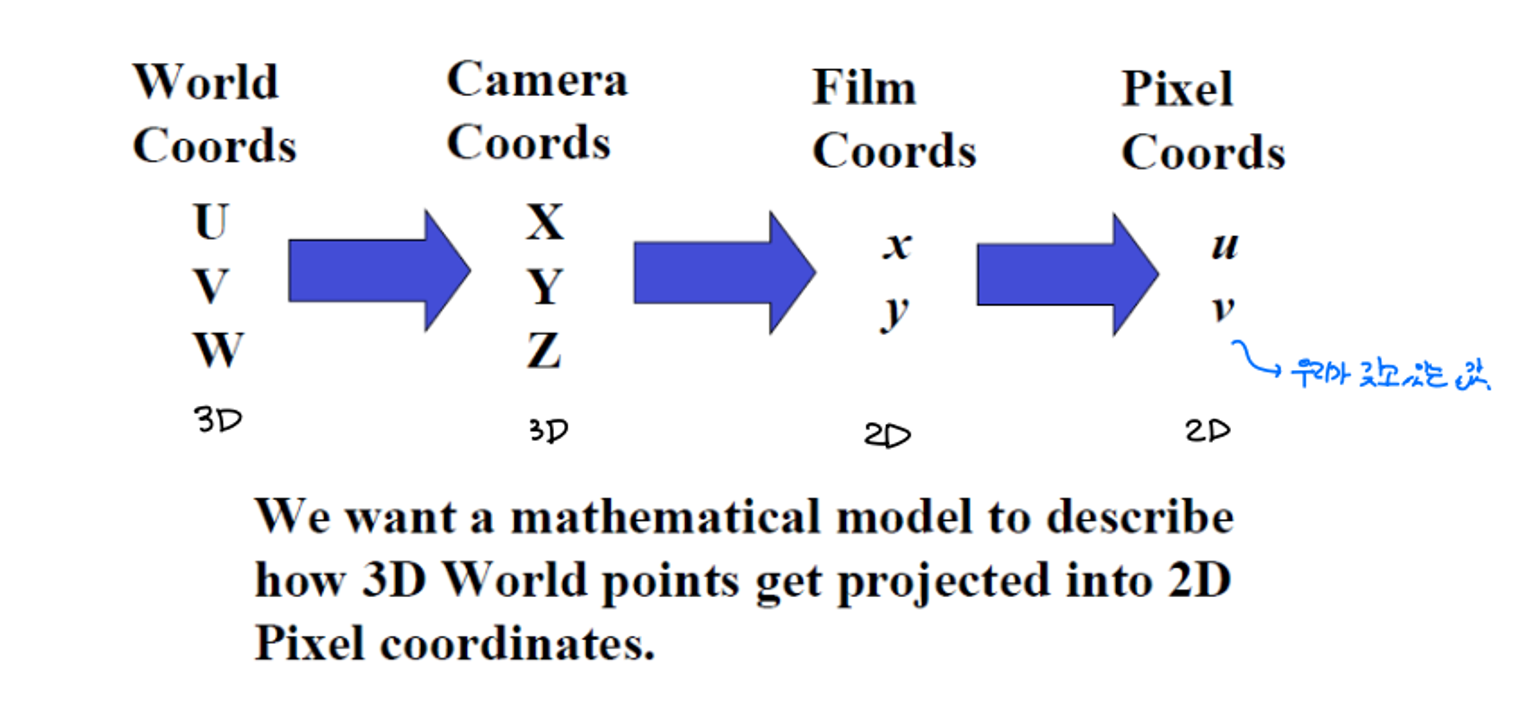
World Coordinates (U,V,W)
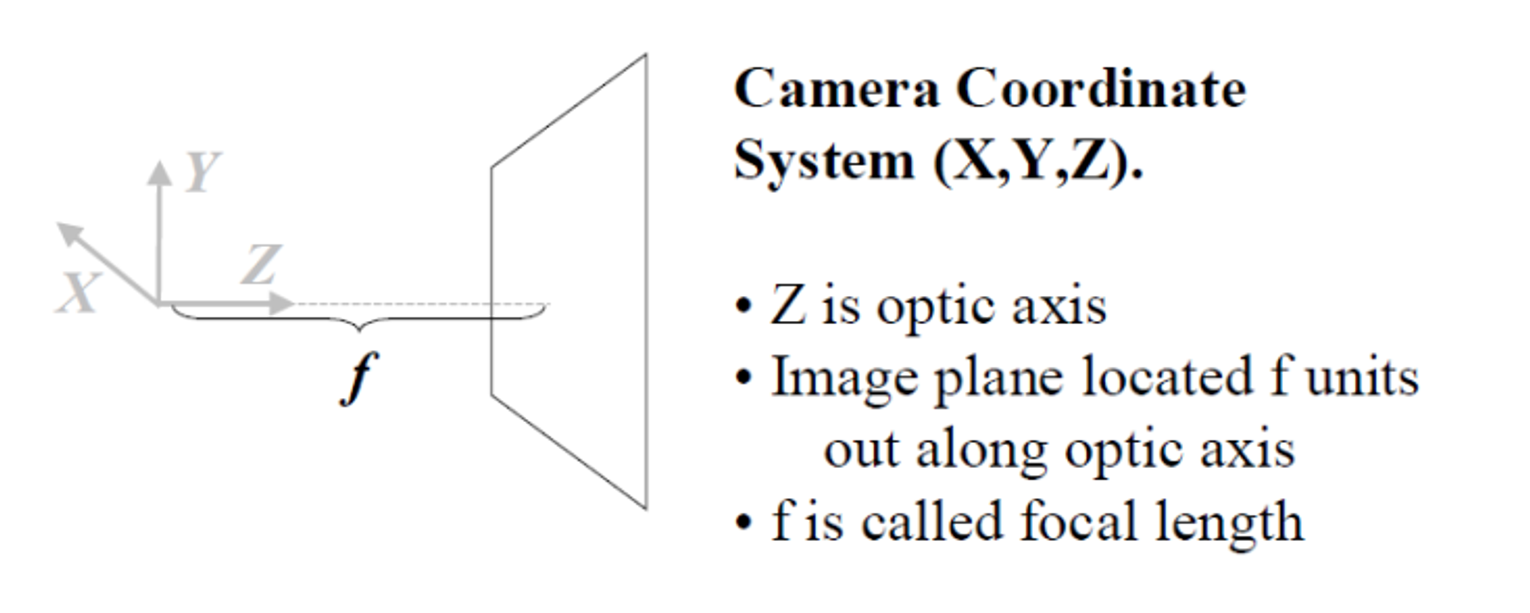
Camera Coordinates (X,Y,Z)
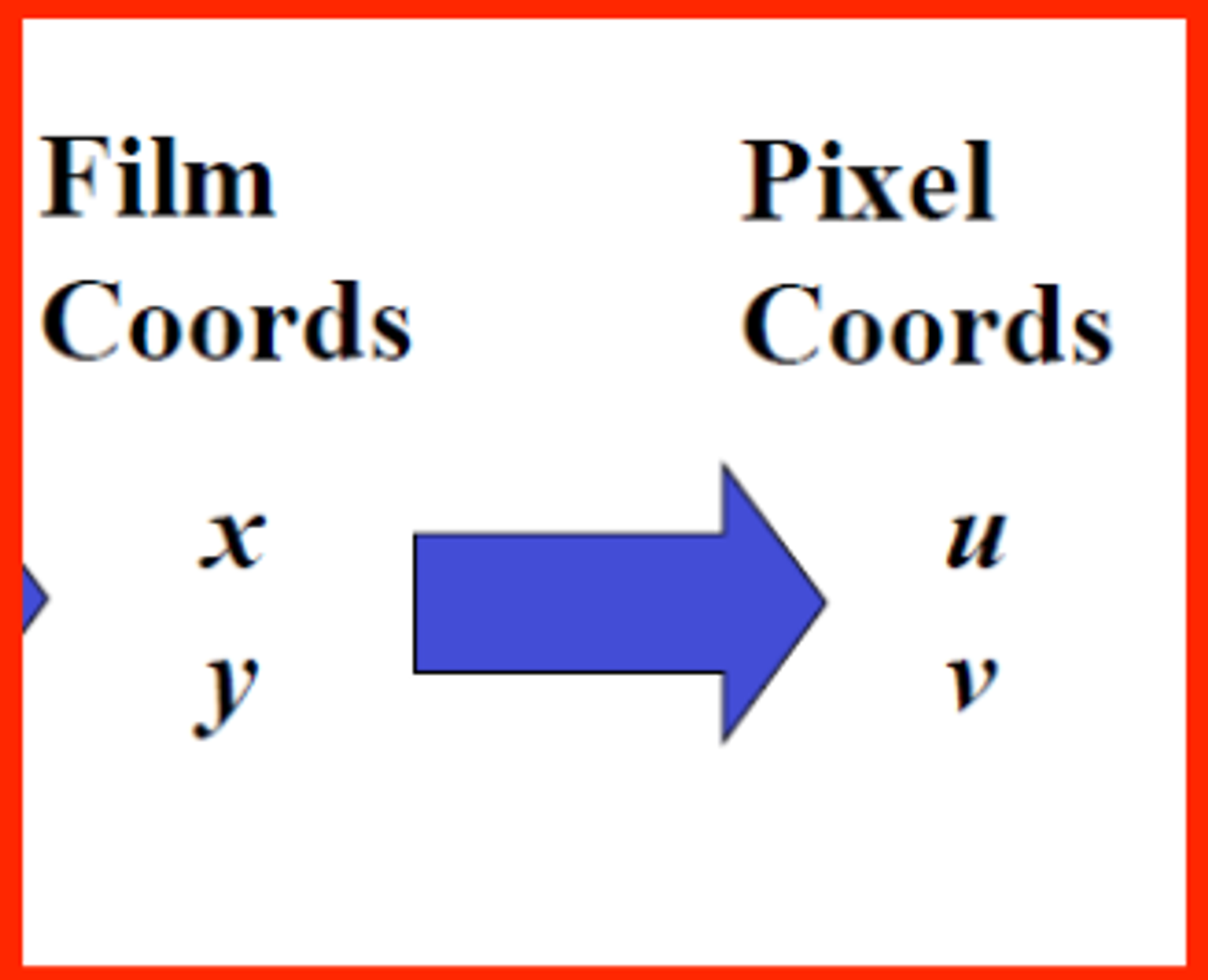
Image(film) Coordinates (x,y)
pixel coordinates (u,v)
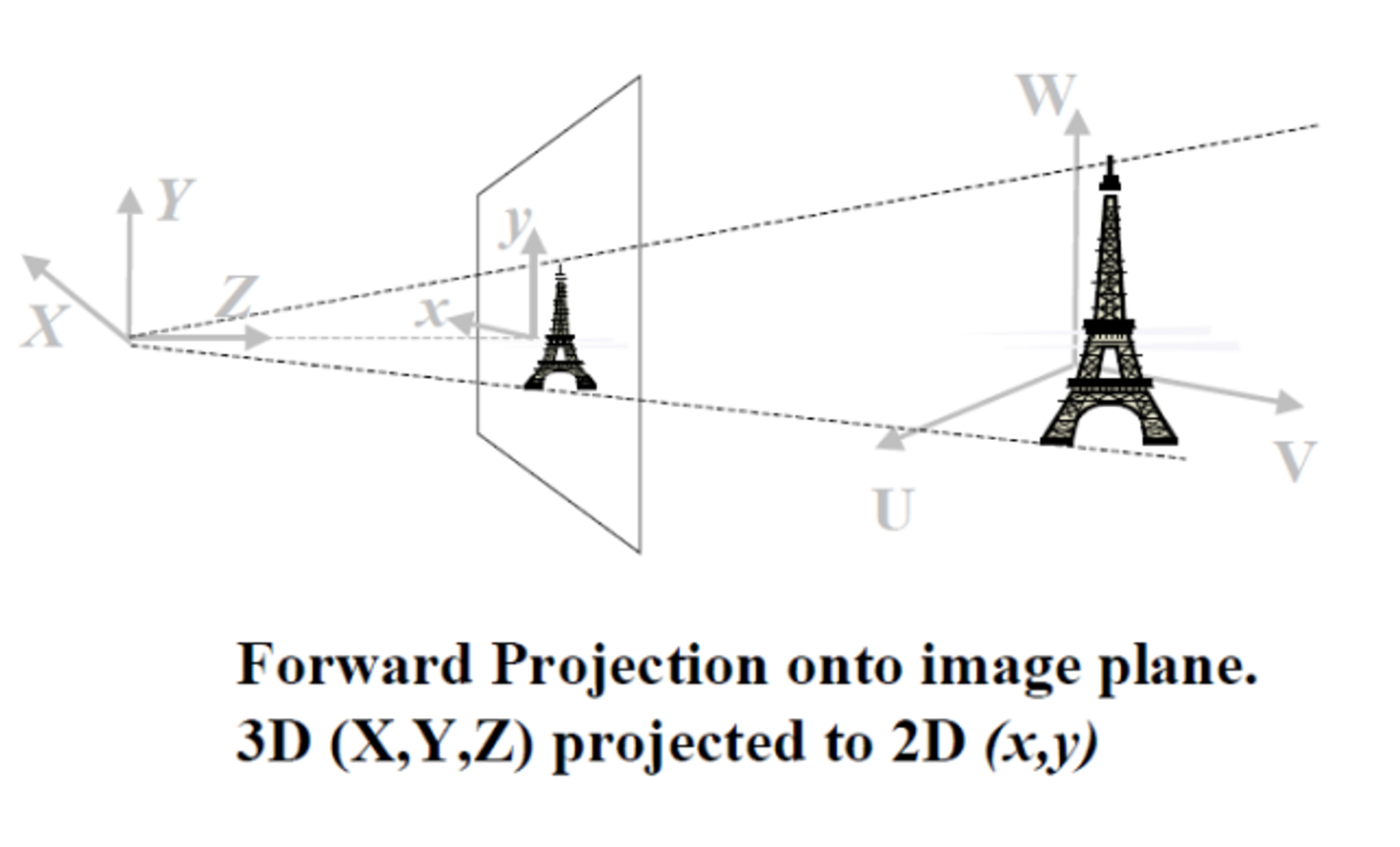
✔ Forward projection
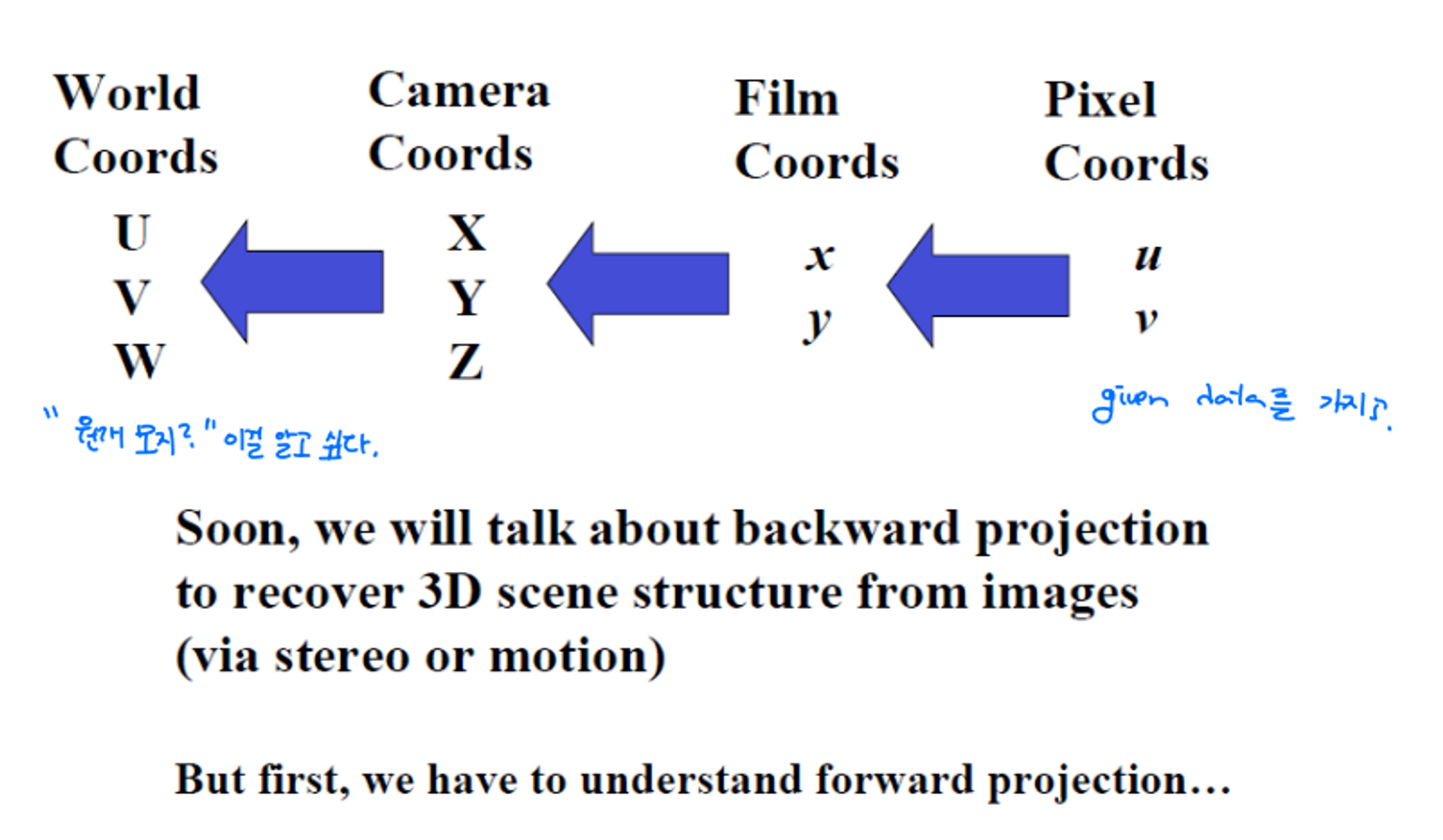
✔ Backward projection
우리는 사진으로 주어지는 pixel coordinate를 가지고 world coordinate를 구하고 싶다. 즉 Backward projection의 과정을 하고 싶으나 이를 하기 위해서는 일단 Forward projection의 과정을 이해해야 한다.
Forward Projection
✅ Rigid Transform
World coords → Camera Coords
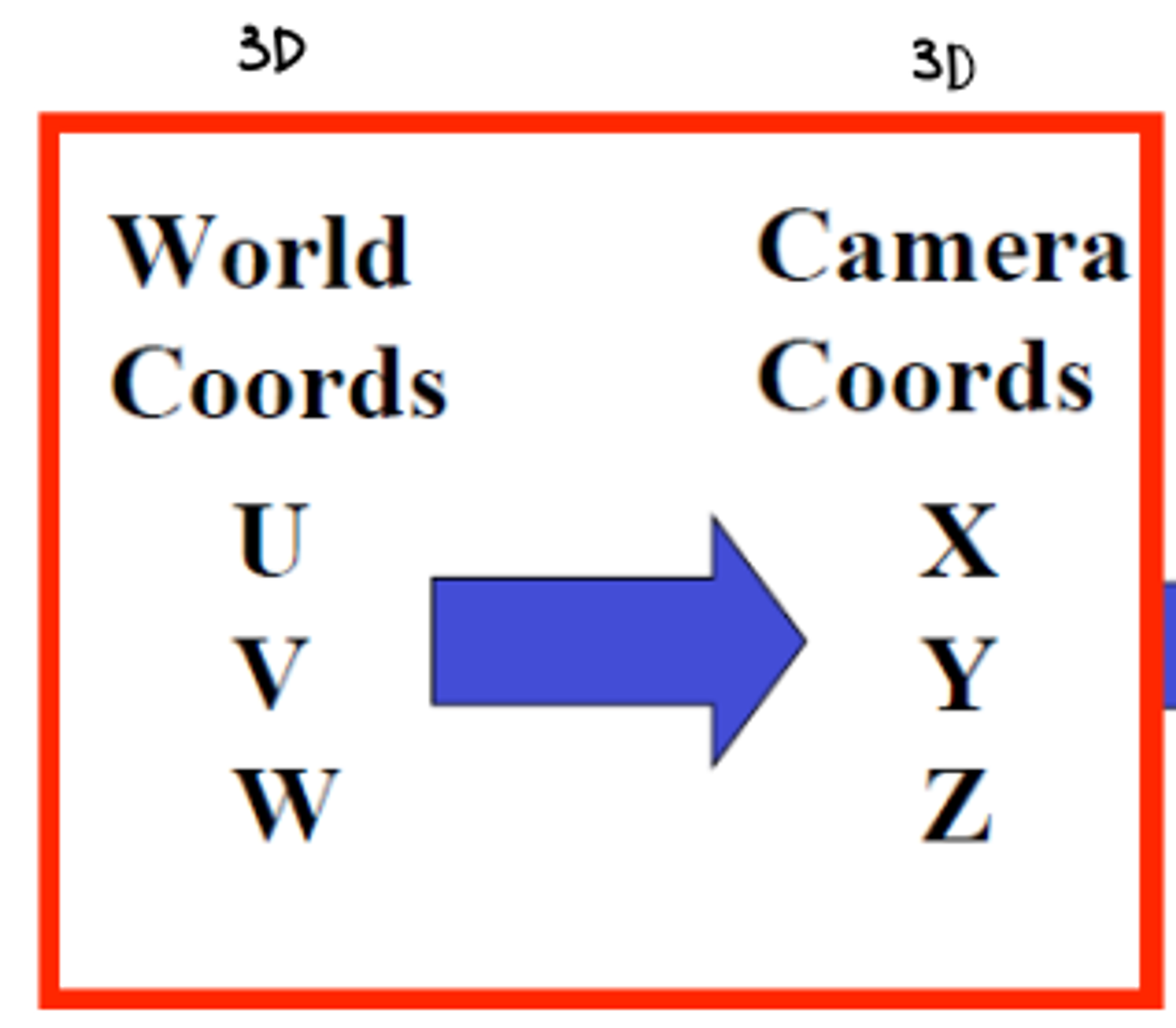
- Rigid Transform은
rotation과translation으로 이루어져 있다. - 왜곡 발생하지 않고 data의 이동과 회전만 발생한다.
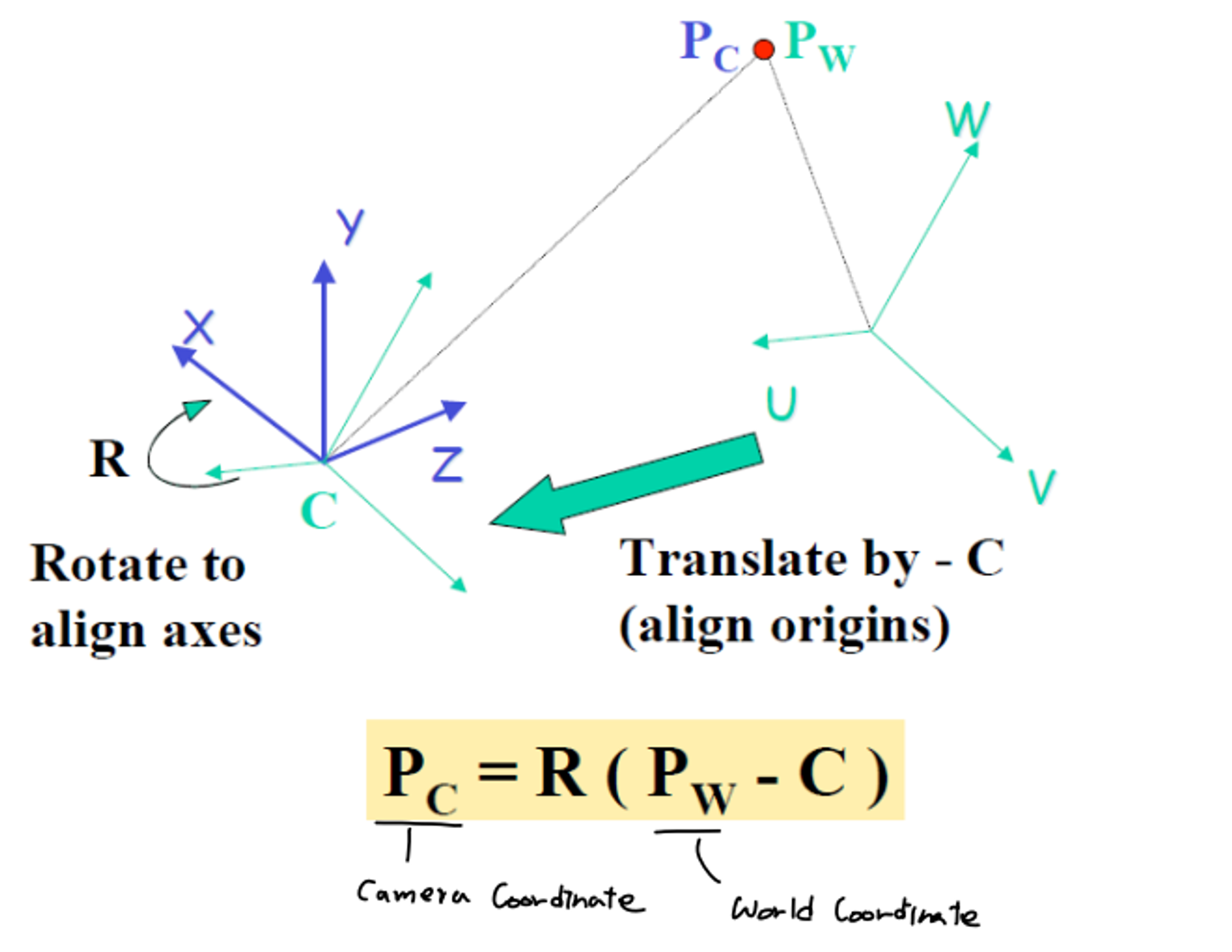
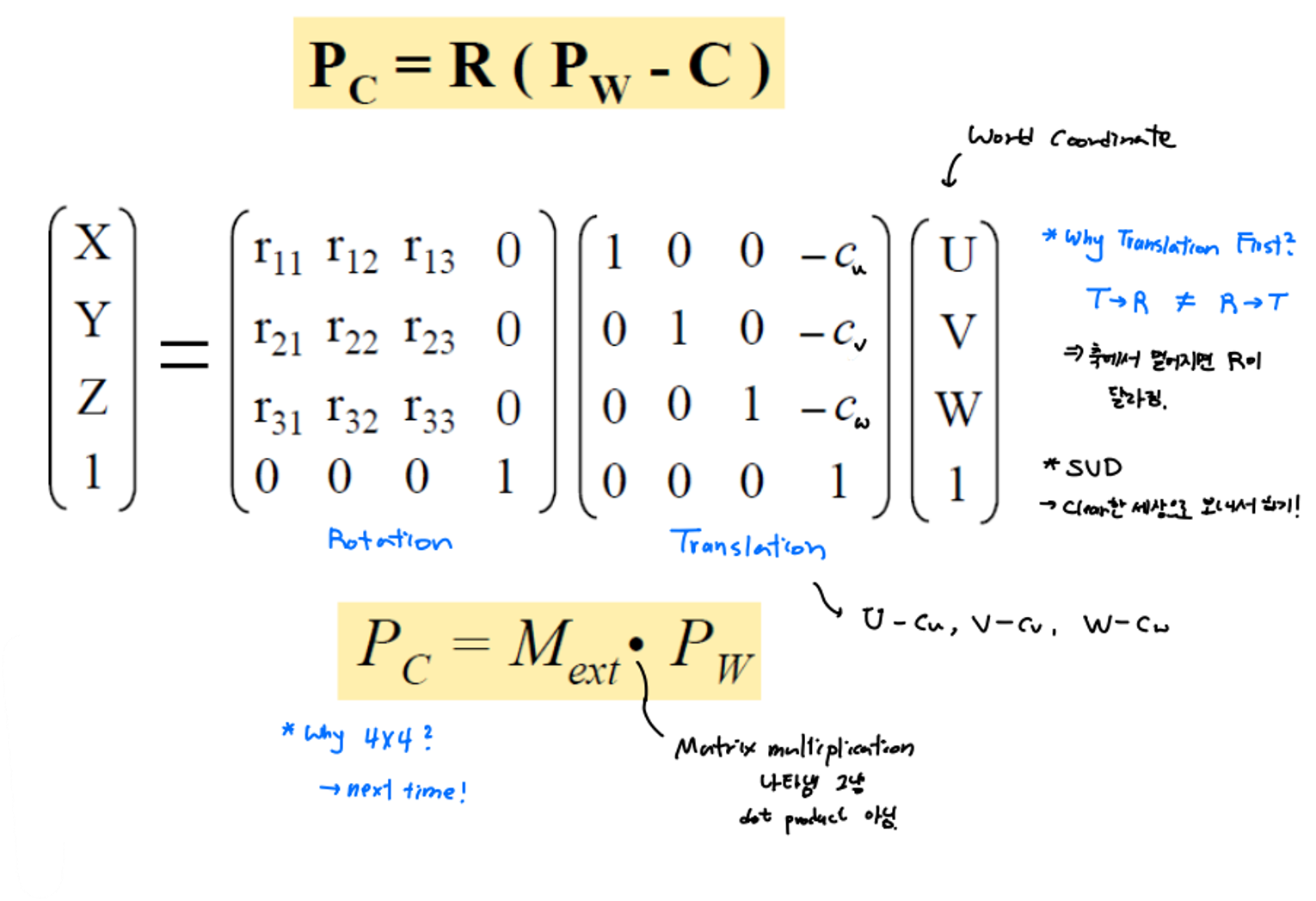
벡터의 형태로 나타내면 다음과 같다.
이때 중요한것은 world coords에 Translation → Rotation 순으로 매트릭스 연산을 해주어야 한다. 축에서 멀어지면 rotation이 달라지기 때문이다.
Translation → Rotation 하는 매트릭스를 하나의 매트릭스 으로 만들어 world coords 에 곱해 camera coords 를 구한다.
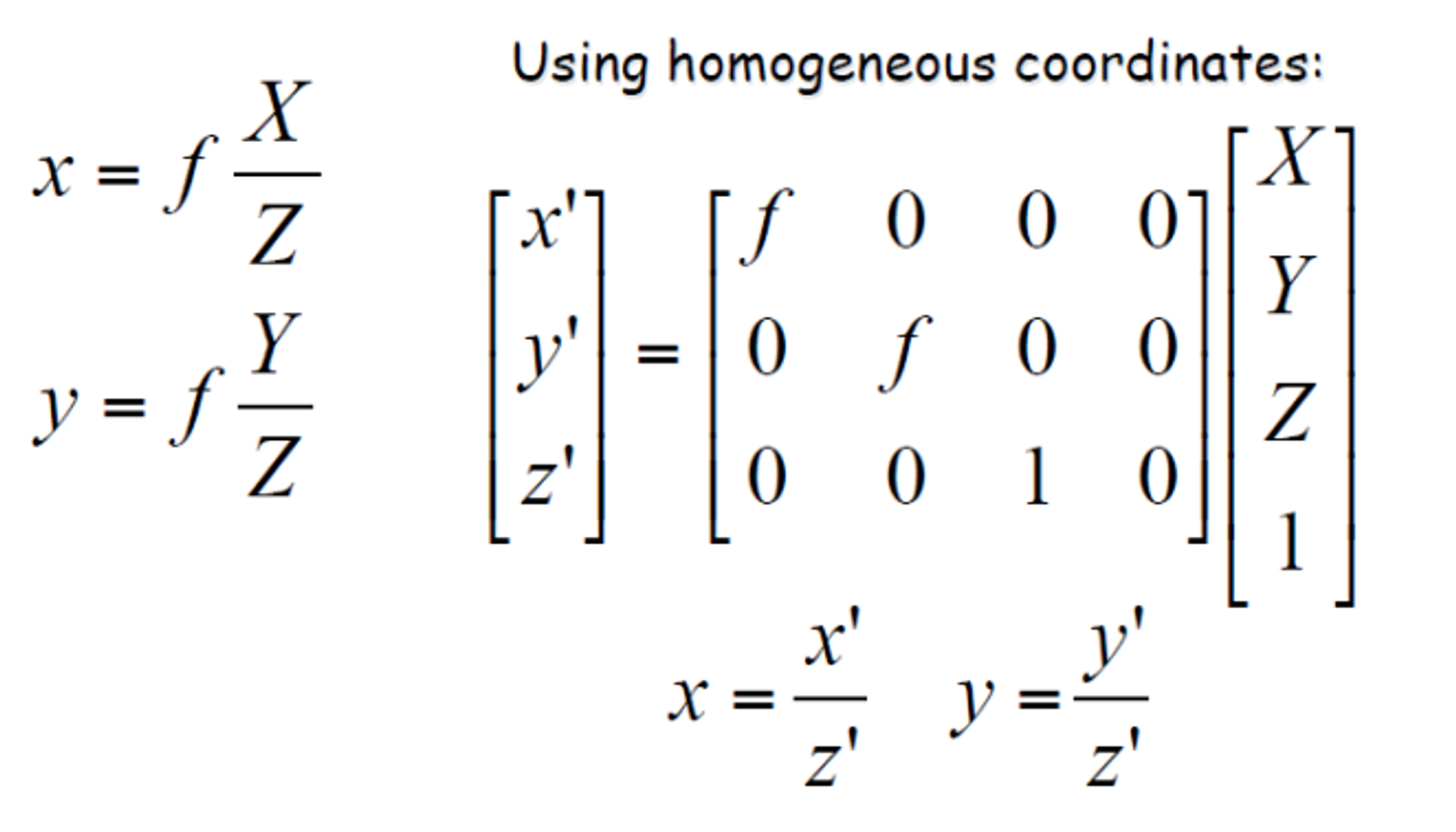
✅ 3D to 2D Projection
Camera coords → Film coords
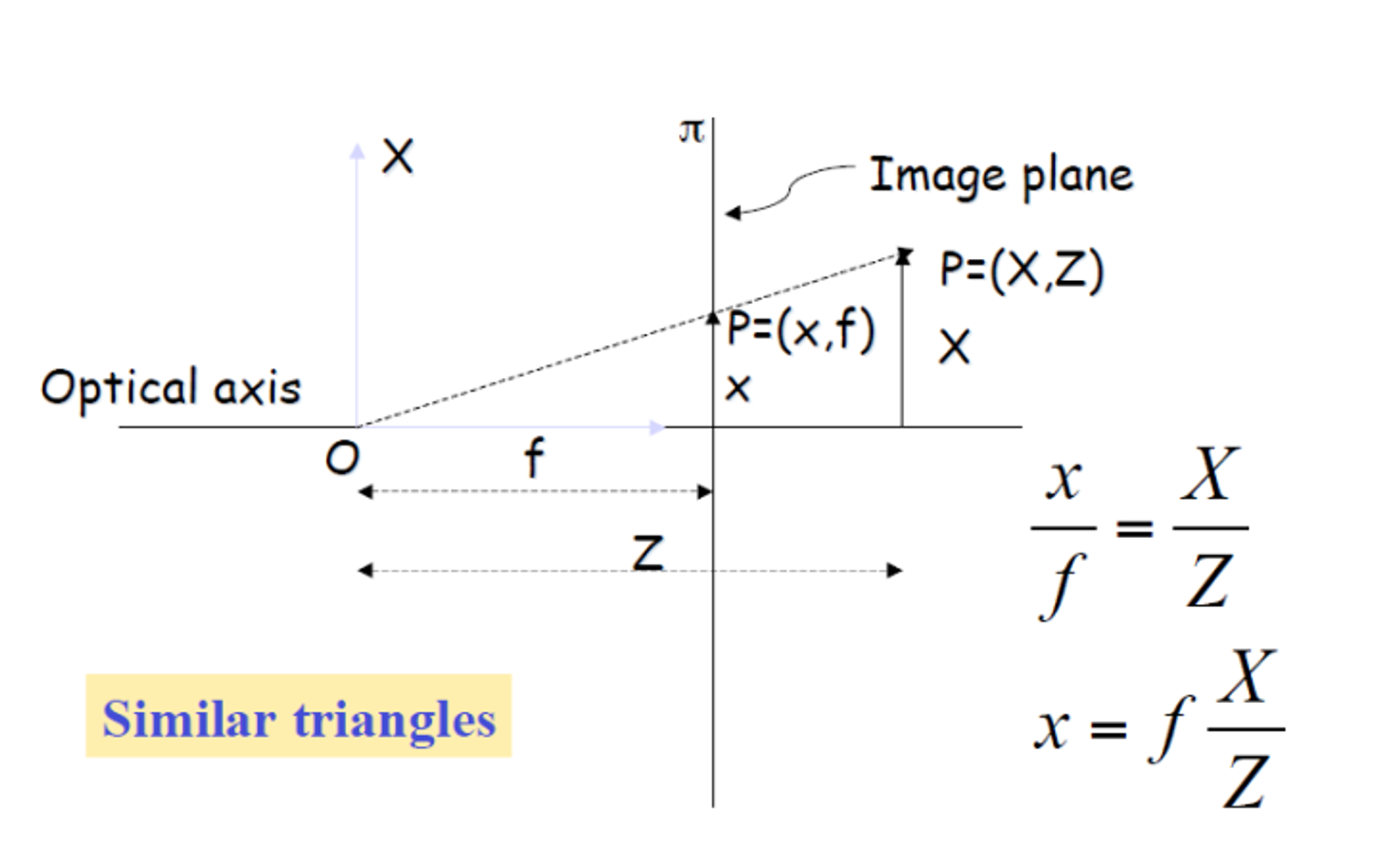
- perspective
- 닮은 삼각형을 이용해 식을 세우면 다음과 같다
- Large XYZ : 실제 존재하는 world coordinate 값
- Z가 클수록 멀리 떨어져 있는 것을 의미한다. 즉, Z값이 크면 원래 값을 죽이는 역할을 한다. 멀리 있는 기찻길일수록 소실점이 발생하는 것처럼 말이다.
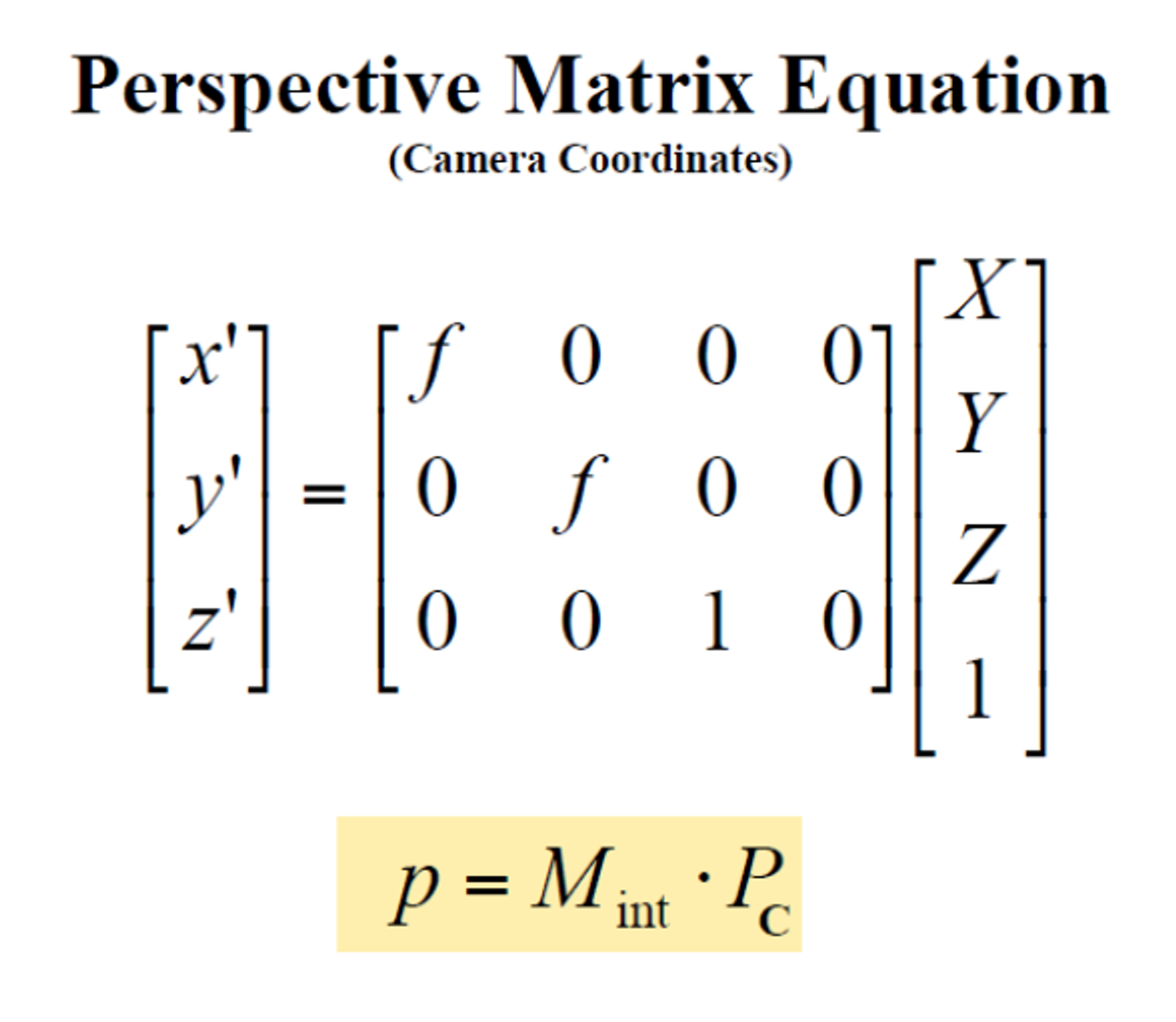
Perspective Matrix Equation
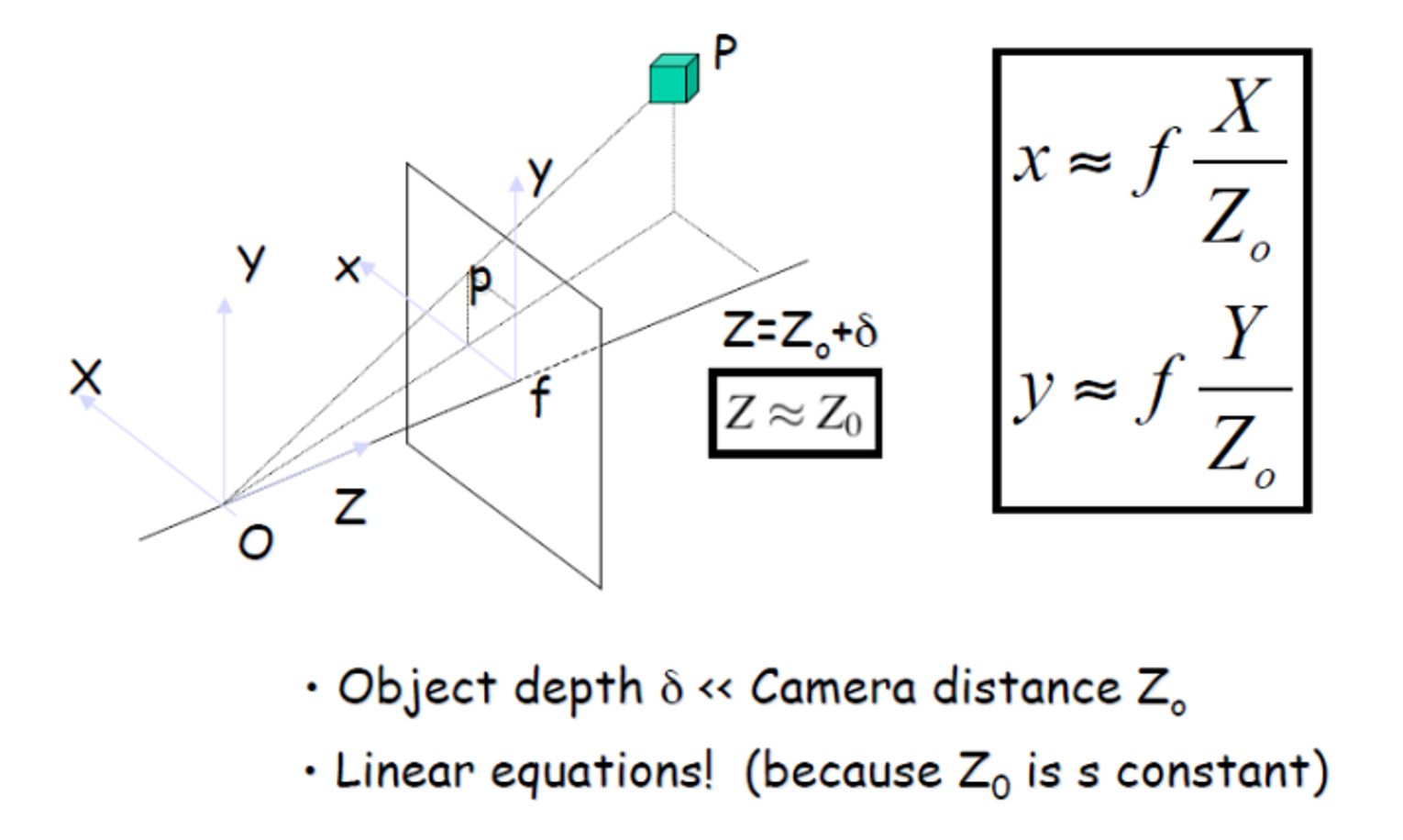
➕ ) Weak Perspective Approximation
물체와의 거리가 충분히 먼 것과 같은 특정 상황에서는 Z 를 위와 같은 방식으로 적용하는 것이 큰 의미가 없을 수 있다. 이런 상황에서 Z값을 상수로 정하고 Z가 움직이는 것을 그냥 구분하지 않고 편하게 계산하고자 할 때 사용할 수 있다.
⇒ 모든 Z값을 하나의 값으로 통일
그런데 이러한 approximation은 오류가 생겨 실제로는 잘 사용하지 않는다.
✅ Affine Transformation
Film Coord → Pixel Coords