[Deep Reinforcement Learning] 13강 Temporal Difference Learning 1
[Deep Reinforcement Learning]
목록 보기
12/33
👨🏫학습목표
오늘은 Temporal Difference Learning과 그 종류 Sarsa, Q-learning에 대해 배워볼 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=5Vbn4XoE45w&list=PLvbUC2Zh5oJtYXow4jawpZJ2xBel6vGhC&index=13
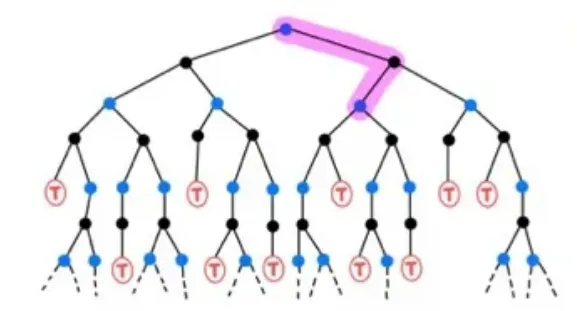
1️⃣ Temporal Difference Learnings (TD)
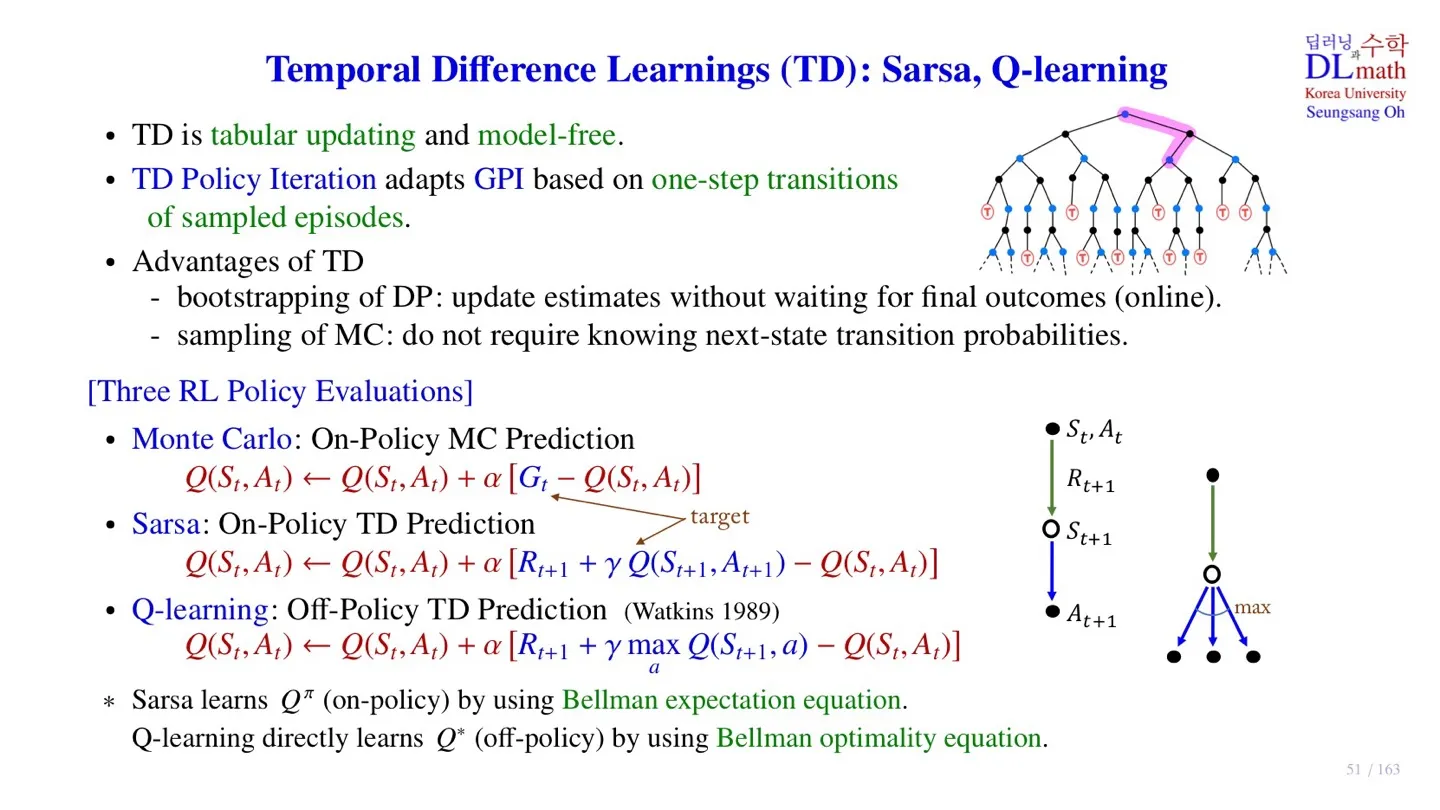
🔷 Temporal Difference Learning
- Transition probability가 주어져 있지 않은 model-free 방식이다.
- Monte Carlo 방식처럼 GPI 방식을 사용하지만 하나의 episode가 아닌 다음 state 단위로 Q-value를 업데이트한다.
- 기존의 방식대로 Table을 만들어 업데이트 하는 방식이다.
🔻 Temporal Difference Learning의 장점
- Bootstrapping: State function을 업데이트 할 때, 다른 state function의 추정치를 활용하여 추정한다.
- 데이터를 sampling하여 사용하기 때문에 next-state transition probability를 몰라도 학습 가능하다.
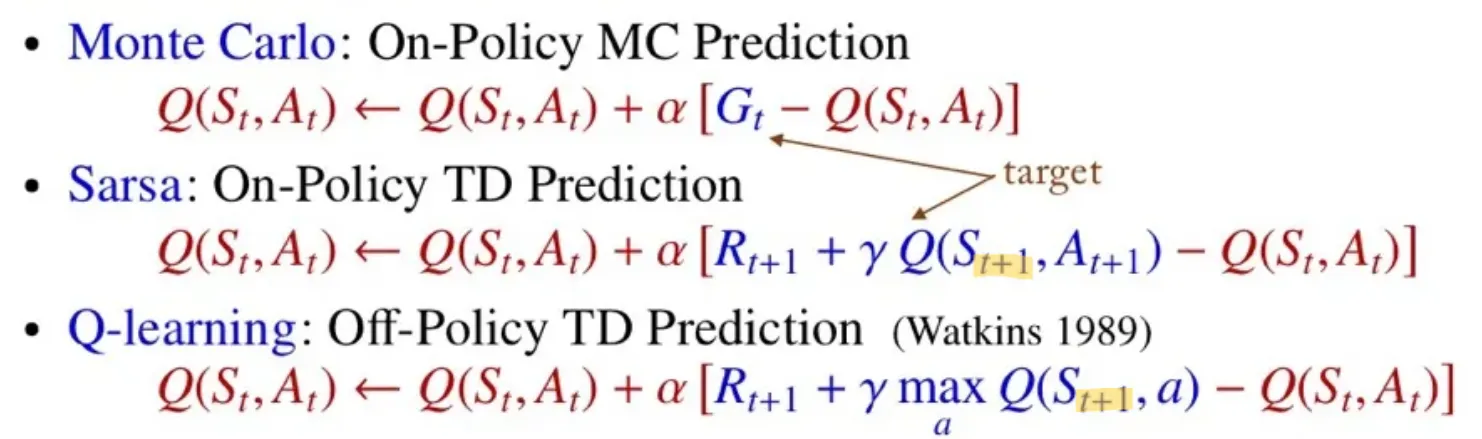
🔷 각 방식의 Policy Evaluation 비교
🔻 Monte Carlo
- Return 를 사용하여 업데이트를 한다.
🔻 Sarsa

- Sample data:
- 현재 state와 action에서 얻게 되는 Reward 과 다음 state-action에 대한 Q-value 를 사용하여 업데이트를 한다.
- 실제로 sample에서 모델이 실행한 action의 을 사용한다.
- 을 사용한다는 것은 모델의 학습에서 stochastic한 부분을 반영하겠다는 의미이다.
- 더 다양한 경험을 하여 미래에 발생할 수 있는 상황에 대한 정보가 풍부하다.
- Bellman expectation equation을 통해 학습한 것이다.
- Current policy를 기반으로 학습한 것이다.
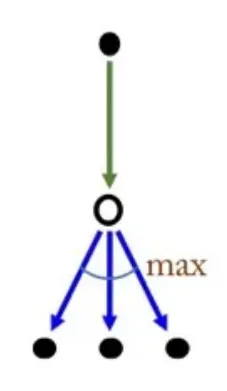
🔻 Q-learning
- Sample data:
- 현재 state와 action에서 얻게 되는 Reward 과 다음 state-action에 대한 Q-value 중 그 값이 최대가 되게 하는 를 사용하여 업데이트를 한다.
- 를 사용한다는 것은 현재 모델이 sample로 어떤 선택은 한지와 관계없이 Q-value값이 가장 큰 action을 취했다고 가정하고 업데이트를 진행한다.
- 를 선택하는 것은 현재 policy에서 최대한 좋은 action을 선택하겠다는 deterministic한 성격을 띄고 있다.
- 항상 이상적인 최적의 선택만 하기 때문에 위험한 상황에 어떻게 대처할지에 대한 학습이 부족하다.
- Sarsa보다는 Q-learning을 적용했을 때 더 좋은 성능이 나왔다는 연구 결과가 있다.
- Bellman optimal equation을 통해 학습한 것이다.
- Optimal policy를 기반으로 학습한 것이다.
2️⃣ Sarsa & Q-learning의 pseudo code
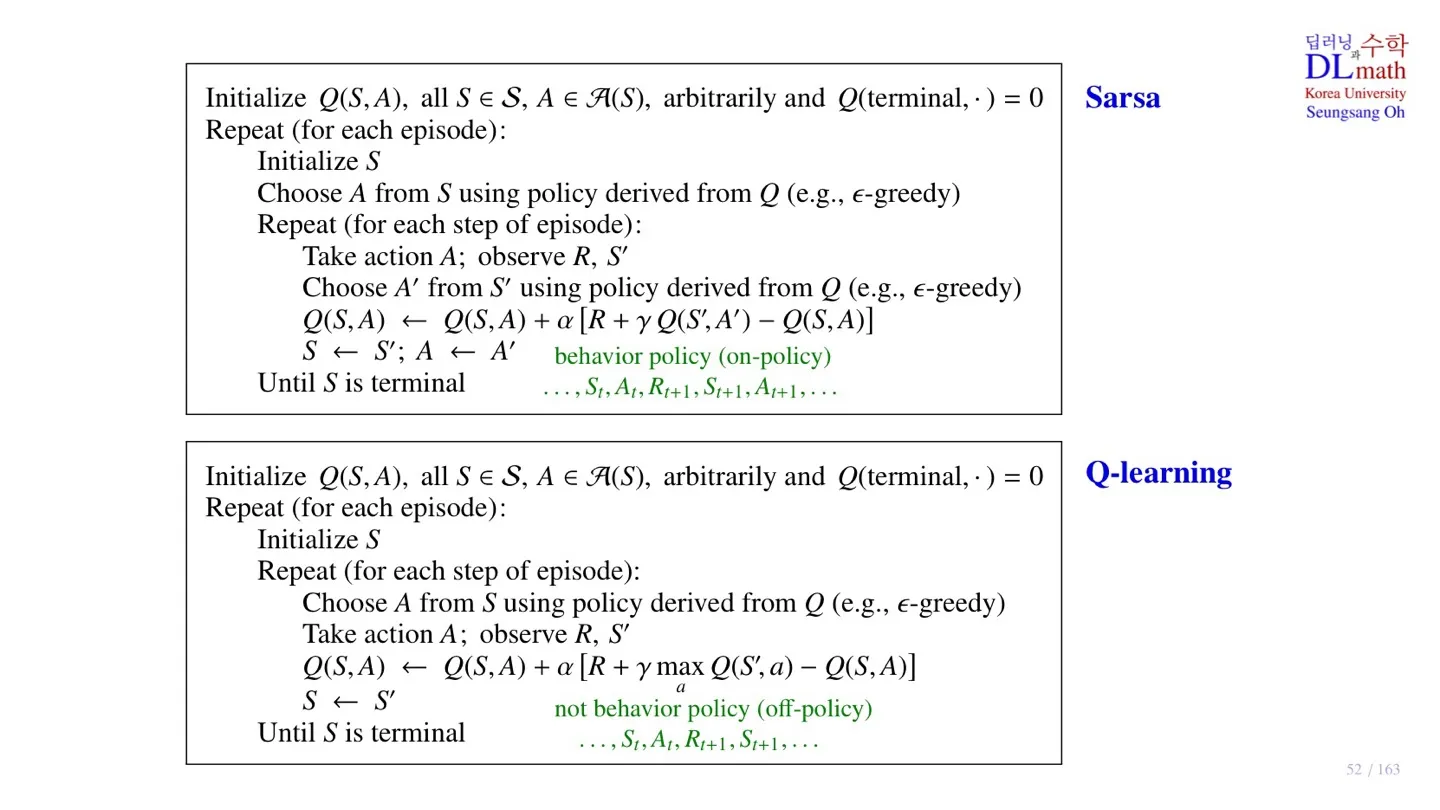
🔷 Sarsa pseudo code
🔻 1. Initialize
- 를 모두 초기화하고 마지막 는 0으로 초기화한다.
- Terminal state 이후에는 model의 행동이 종료되기 때문이다.
🔻 2. Policy Evaluation
- 시작 state 을 정한다.
- 시작 state 에서 모델의 -greedy policy에 따라 를 선택한다.
- model이 실제 경험을 하며 과 에 대한 data를 수집한다.
- 에서 모델의 -greedy policy에 따라 를 선택한다.
🔻 3. Policy Imprevoment
- Q-value를 수집한 데이터를 통해 업데이트한다.
🔷 Q-learning pseudo code
🔻 1. Initialize
- 를 모두 초기화하고 마지막 는 0으로 초기화한다.
- Terminal state 이후에는 model의 행동이 종료되기 때문이다.
🔻 2. Policy Evaluation
- 시작 state 을 정한다.
- 시작 state 에서 모델의 -greedy policy에 따라 를 선택한다.
- model이 실제 경험을 하며 과 에 대한 data를 수집한다.
🔻 3. Policy Improvement
- 를 통해 업데이트한다.
3️⃣ On-policy vs Off-policy
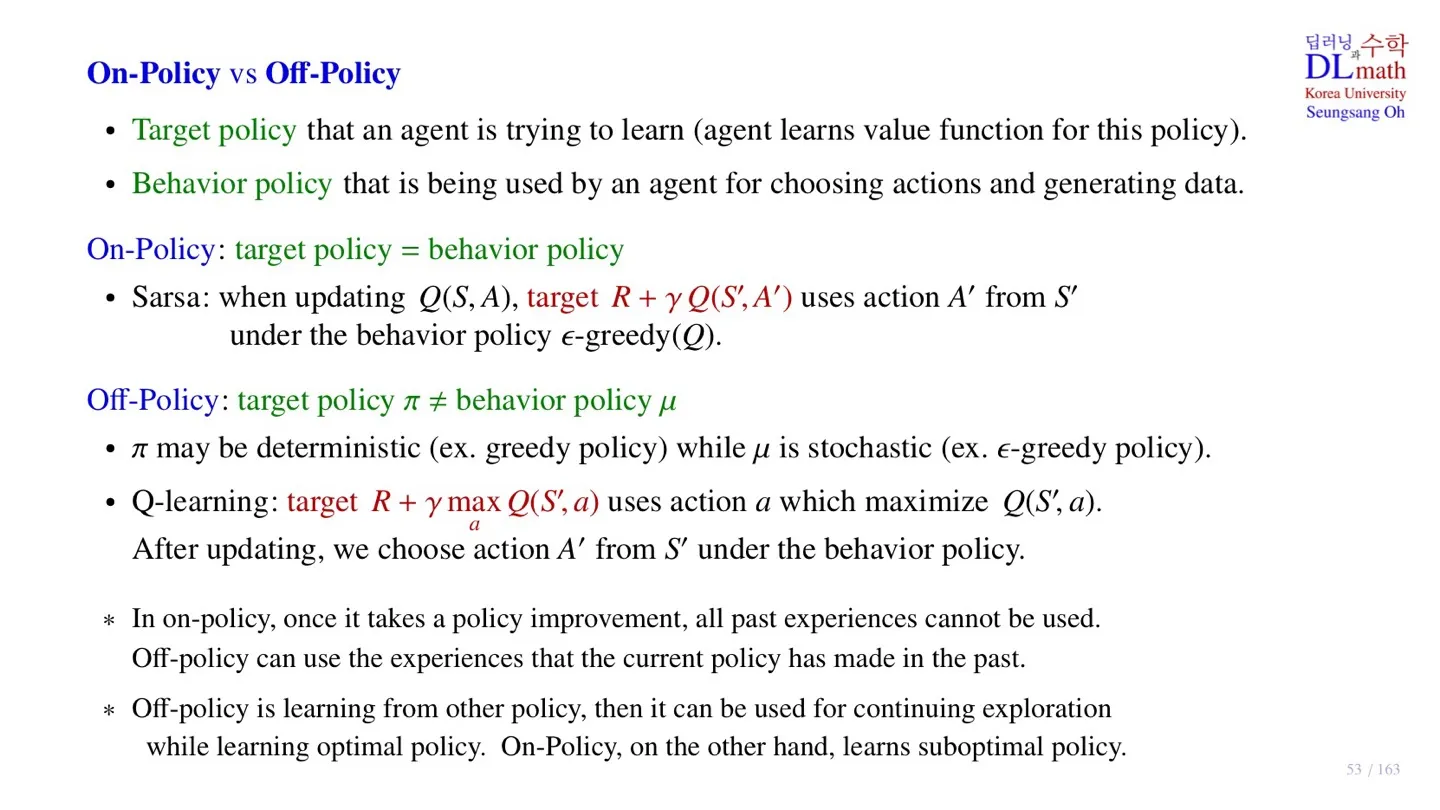
🔻 Target policy
- Q-value를 추정하기 위해서 action을 결정하기 위해 사용하는 policy
- Sarsa:
- Q-learning:
🔻 Behavior policy
- Sample data를 수집하기 위해 모델이 실제로 행동하는 policy.
- Sarsa, Q-learning 모두 현재 policy 에 따라 행동한다.
🔷 On-policy
- target policy = behavior policy
- 모델이 실제로 행동한 data를 반영하여 업데이트를 진행한다.
- Stochasitic policy를 사용한다고 볼 수 있다.
- Current policy를 통해 얻은 sample data를 사용하기 때문에, policy가 업데이트할 때 해당 sample data만 고려한다.
- Sub-optimal policy이다.
🔷 Off-policy
- target policy ≠ behavior policy
- 모델이 실제로 행동한 방식과 무관하게 최적의 action에 따라 업데이트를 진행한다.
- Deterministic policy를 사용한다고 볼 수 있다.
- 를 통해 업데이트를 진행하기 때문에, 지금까지 추정한 모든 를 고려한다.
- 수집한 sample data를 따르지 않기 때문에 조금 더 exploration을 한다고 볼 수 있다.
4️⃣ 정리
🔷 12강에서 배운 내용은 아래와 같다.
- Temporal Difference Learnings에 대해서 배웠다.
- TD의 종류의 Sarsa와 Q-learning에 대해 배웠다.
- Sarsa와 Q-learning의 pseudo code를 살펴보았다.
- On-policy와 Off-policy에 대해 살펴보았다.

I'm curious about AI