👨🏫학습목표
오늘은 -greedy policy와 MC Control 그리고 GLIE에 대해 배워볼 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=TF63tYx-fdk&list=PLvbUC2Zh5oJtYXow4jawpZJ2xBel6vGhC&index=12
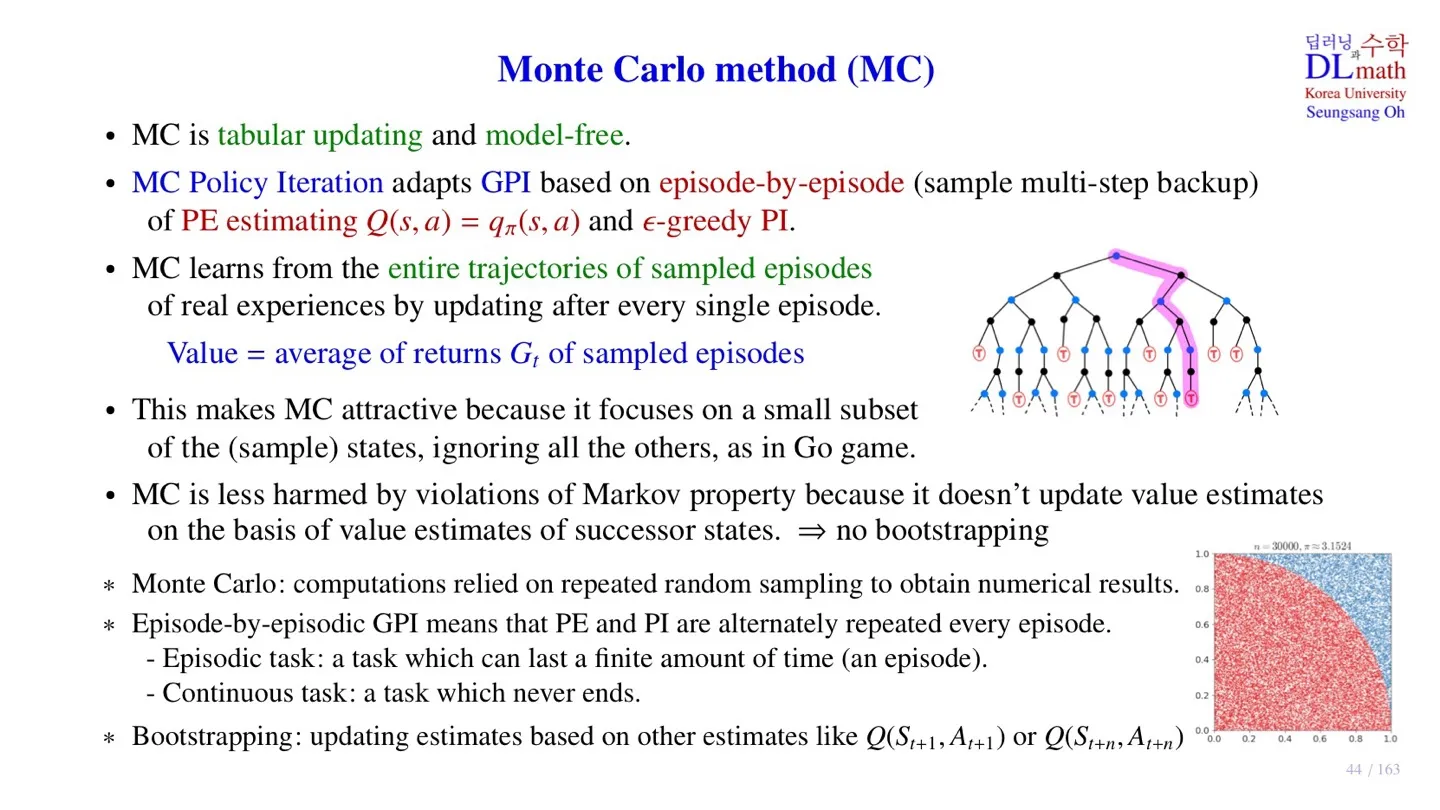
1️⃣ Monte Carlo method
📕 지난 시간에 배운 내용
- Monte Carlo 방식은 sample을 이용한 GPI 방식을 사용한다.
- Sample data는 episode 단위로 구성되어 있다.
- 추정치를 사용한다.
2️⃣ -greedy policy
🔷 Exploitation
-
Exploitation이란 우리가 이미 알고 있는 정보 내에서 최선의 결정을 내리는 것.
ex) 자주 가는 집 중에서 가장 맛있는 집을 찾아가는 방식 -
가장 큰 Q-value를 사용하여 action을 선택하는 방법.
-
greedy policy와 같은 개념
-
이미 알고 있는 정보에서 최적의 policy를 찾는 것이기 때문에 효율적으로 업데이트하는 방식으로 이해할 수 있다.
-
단점: 경험하지 않는 sample에 대해서는 접근하지 않는다.
🔷 Exploration
-
Exploration이란 우리가 알고 있는 것 외에 추가적인 정보를 참고해서 새로운 결정을 내릴 수 있도록 찾는 방법
ex) 가보지는 않았지만 새로운 맛집의 정보를 찾아 시도해보는 것 -
Exploitation에서 선택할 최적의 action을 확률로 취한다.
-
만큼은 random하게 다른 action을 취한다.
-
장점: 그동안 경험하지 않았던 state-action을 경험하여 더 좋은 policy를 찾을 수 있다.
-
단점: risk가 따른다.
🔷 -greedy policy
-
-greedy policy이란 Exploitation 방법과 Exploration 방법을 trade-off로 조절하는 방법이다.
-
만큼은 ramdom하게 선택하고 만큼은 최적의 -value를 선택하는 방법이다.
-
궁극적으로 더 좋은 decision을 할 수 있다.
-
물론 short-term sacrifice 가 존재한다.
3️⃣ MC Control
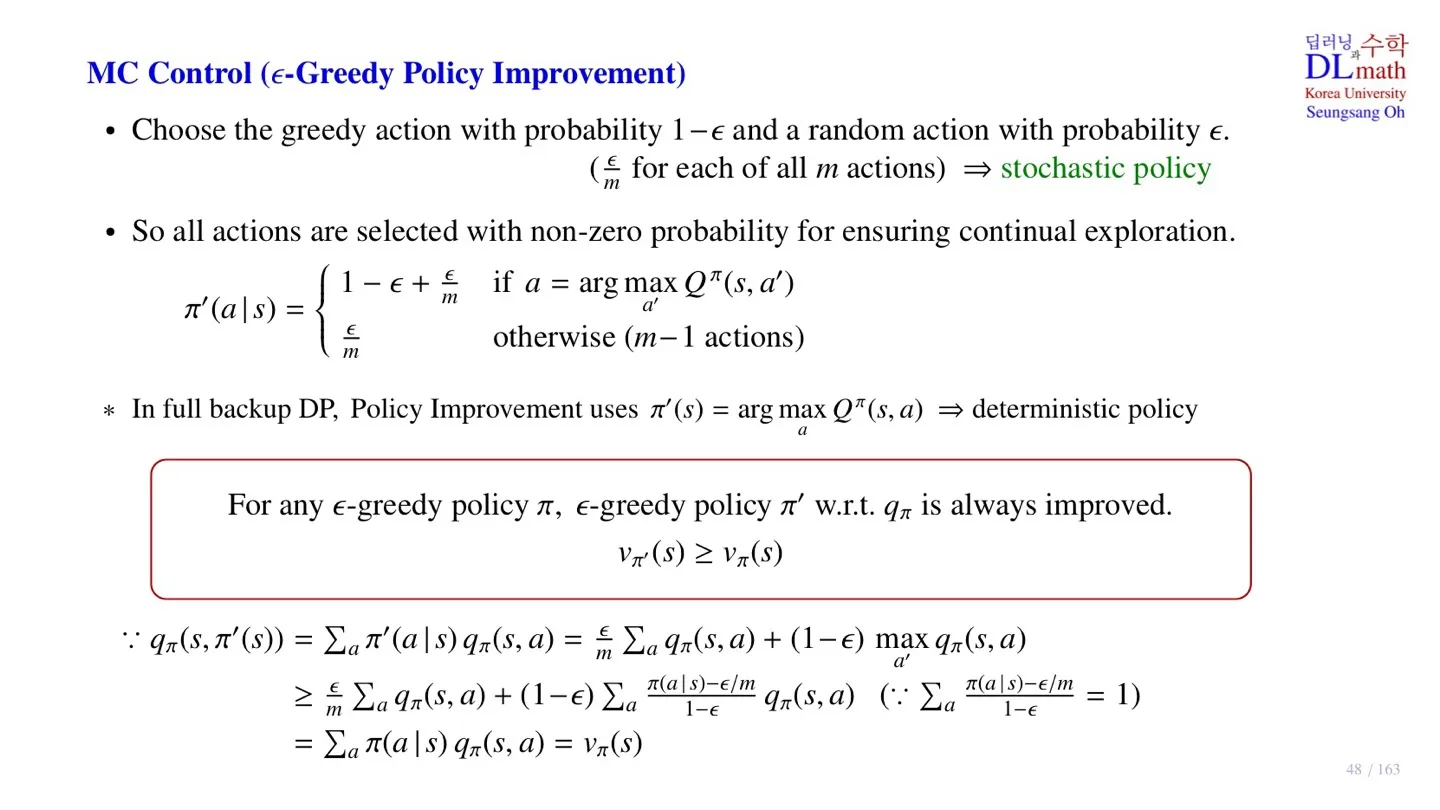
🔷 MC Control
-
MC Control에서는 policy를 개선한다. 그 전에 앞서 살펴본 -greedy policy를 생각해보자.
-
-greedy Policy에서 ramdom action을 취할 확률은 이다.
-
이때 모델이 취할 수 있는 action의 수가 m개라면, 각 action은 의 확률로 발생한다.
🔻 기존의 greedy policy
- 기존의 Greedy policy에서는 를 선택하기 때문에 action을 취하는 방식 자체가 deteministic 하다.
🔻 -greedy Policy
- -greedy는 확률로 random action을 취하기 때문에 stochastic하다고 할 수 있다.
❗여기서 잠깐!
Stochastic policy를 사용할 때도 policy를 개선할 때마다 더 좋은 policy가 도출된다는 보장이 있을까?🤔
- 결론부터 말하자면 -greedy Policy에서도 Policy는 개선된다.
✍ 증명 과정
- Action-value function을 취할 수 있는 action으로 분해하여 기호로 표현한다.
- 함수를 최적의 action과 random action으로 구분하여 작성한다.
-
부등호가 성립하는 이유는 최대값이 기대값보다 항상 크다는 때문이다.
-
합은 1을 만족하지만, 음수인 항 역시 존재할 수 있다. 기존 policy의 action에 대한 확률 분포와 개선된 policy의 확률 분포는 다를 수 있기 때문이다.
- 최종적으로 각 항의 공통 부분을 제거하면 state-value function에 도달한다.
📕 Policy Improvement Theorem
Policy Improvement Theorem에 따라 -greedy Policy Improvement 방식에서는 policy가 계속해서 개선된다.
4️⃣ Greedy in Limit with Infinite Exploration
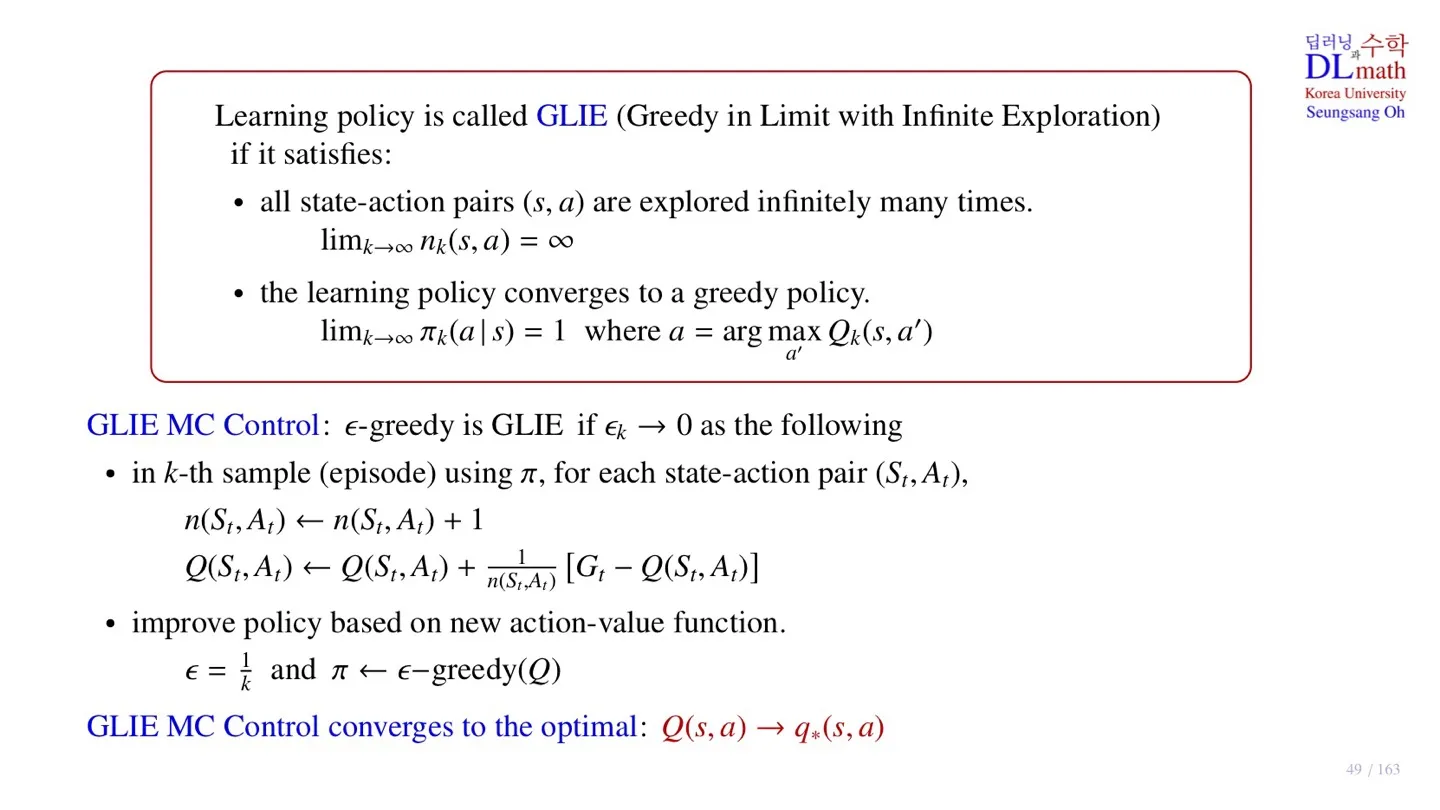
🔷 Greedy in Limit with Infinite Exploration의 조건
아래의 2조건을 만족하면 이를 GLIE라고 한다.
🔻 1.
-
State-action pair의 sample을 무한히 방문해야 한다.
-
State-action에 대한 정확한 mean Return값을 구하기 위해서다.
-
Sample data를 늘리는 방법으로 조건을 만족할 수 있다.
🔻 2.
-
최종적으로 stochastice이 사라지고, Greedy policy에 수렴해야 한다.
-
값이 0에 수렴하도록 조정해야 한다.
🔷 GLIE MC Control
- Sample 수를 계속 늘린다.
-
Incremental Monte Carlo update를 적용한 것이다.
-
물론 를 적용할 수도 있다.
-
and - 을 통해 값을 조절할 수 있다.
- 이러한 방식을 통해 Optimal action function을 구할 수 있다.
5️⃣ Monte Carlo method의 pseudo code
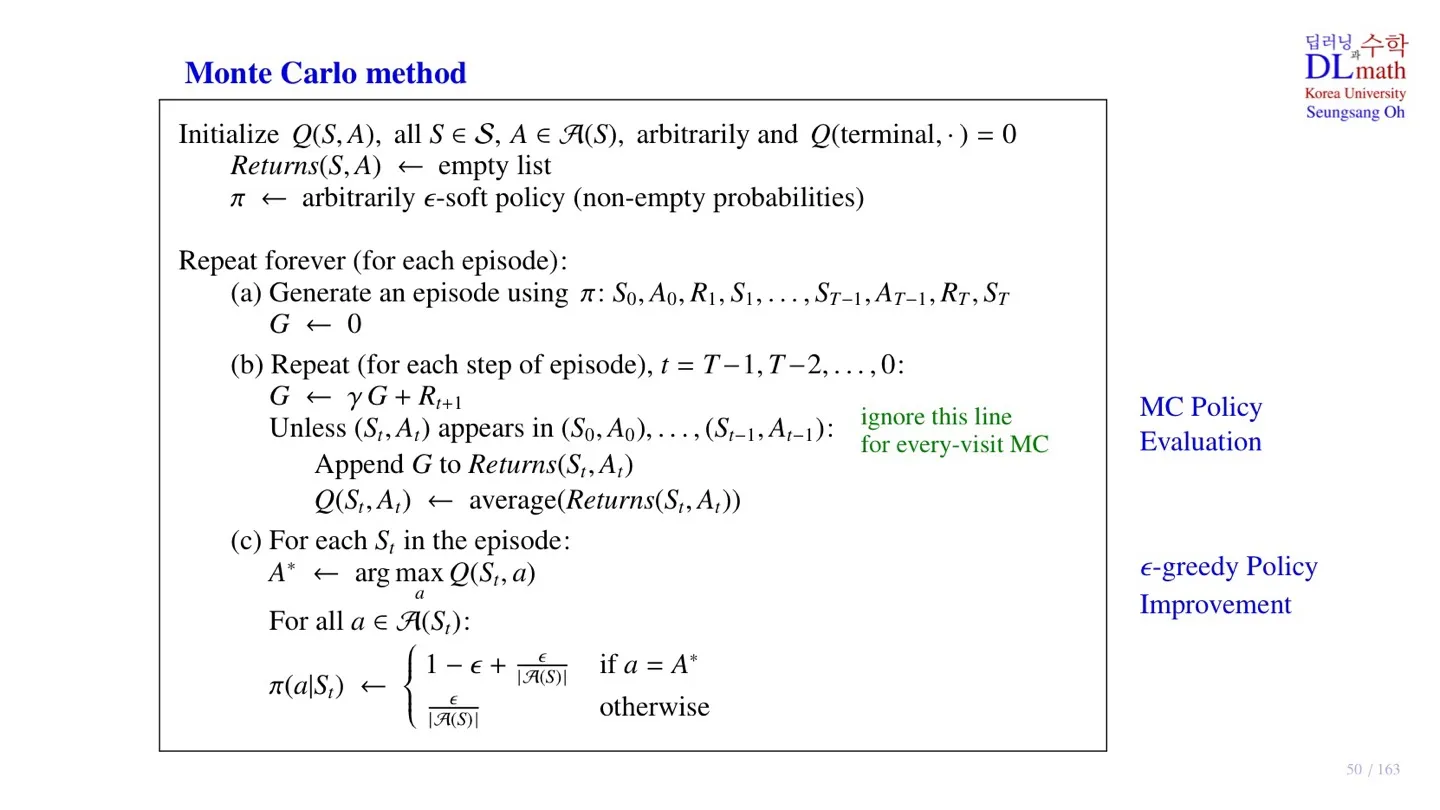
🔷 Monte Carlo method
🔻 1. Initialize
-
모든 state, action 쌍에 대한 Q-value 를 초기화한다.
-
Terminal state의 Q-value값은 암묵적으로 0으로 한다.
-
Return 를 저장할 리스트를 만든다.
-
Policy 역시 초기화하되, 모든 action이 약간의 확률을 가지도록 한다.
2, 3 단계는 각 episode별로 반복한다.
🔻 2. MC Policy Evaluation
-
Data sample:
-
Return값은 0으로 초기화
-
연산을 통해 을 계산한다.
-
Unless 부터는 처음 등장한 에 적용하는 방식으로 first-visit에만 적용된다.
-
Return값을 통해 mean Return 값을 적용할 수 있다.
- Incremental MC:
- constant- MC:
🔻 3. -greedy Policy Imprevement
-
하나의 episode 내에 존재하는 state action에 대해 업데이트를 진행한다.
-
Action의 수
이러한 과정을 반복하면 Policy Evaluation과 Policy Improvement가 각각 수렴하게 된다. 이때 학습을 종료하면 된다.
6️⃣ 정리
🔷 12강에서 배운 내용은 아래와 같다.
- -greedy Policy에 대해 배웠다.
- Policy를 개선하는 MC Control 단계에 대해 배웠다.
- -greedy Policy에서도 policy가 개선됨을 증명하였다.
- GLIE와 GLIE가 되기 위한 조건 2가지를 살펴보았다.
- Monte Carlo method의 pseudo code에 ****대해 살펴보았다.
