👨🏫학습목표
오늘은 Importance Sampling과 Off-policy Monte Carlo and Temporal Difference에 대해 배워볼 예정이다.
1️⃣ Importance Sampling
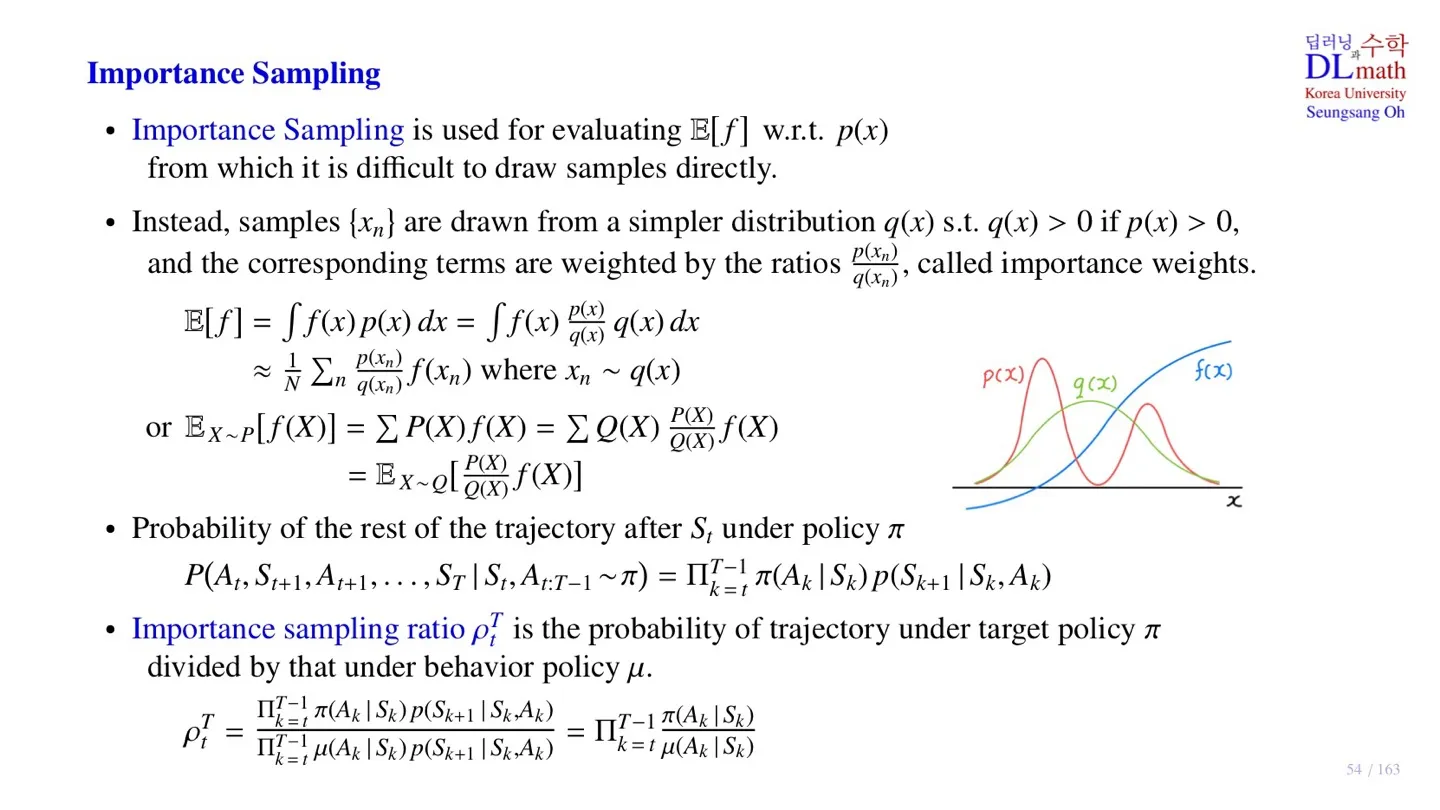
🔷 Importance Sampling 등장배경
- 앞서 우리는 On-policy와 Off-policy에 대해 배웠다.
- 그런데 On-policy보다는 Off-policy가 장점이 더 많이 때문에 우리는 Monte Carlo와 Sarsa를 On-policy에서 Off-policy로 바꾸려고 한다.
- 구체적으로 각 방식의 behavior policy를 다른 것으로 바꾸는 방법을 통해 이를 구현한다.
- 이때 사용되는 개념이 Importance Sampling이다.
E[f]=∫f(x)p(x)dx=∫f(x)q(x)p(x)q(x)dx
- 실제로 적분을 계산하는 대신 sampling을 통해 기대값을 구할 수 있다.
≈N1n∑q(xn)p(xn)f(xn) where xn∼q(x)
- 이를 Monte Carlo sampling이라고 한다.
- sampling을 통해 근사값을 구할 수 있다.
- 그런데 x∼p(x)일때, p(x)에서 x를 sampling하는 것이 어려울 수 있다.
- 예를 들어 p(x)가 복잡한 함수일 경우 sampling하는 것이 어려울 수 있다.
그래서 우리는 p(x)대신 우리가 잘 알고 있는 Uniform 혹은 Gaussian 분포에서 sampling을 할 계획이다.
하지만 p(x)와 q(x)는 다른 함수이기 때문에 오차가 발생한다. 이를 보정하기 위해서 q(xn)p(xn)를 곱한다.
이를 Importance weight라고 한다. 그리고 이러한 방식을 통해 기대값을 구하는 것을 Importance Sampling이라고 한다.
🔻 Discrete한 경우
EX∼P[f(X)]=∑P(X)f(X)=∑Q(X)Q(X)P(X)f(X)
=EX∼Q[Q(X)P(X)f(X)]
🔻 Continuous한 경우
E[f]=∫f(x)p(x)dx=∫f(x)q(x)p(x)q(x)dx
≈N1n∑q(xn)p(xn)f(xn) where xn∼q(x)
🔷 Monte Carlo에 적용하기
qπ(s,a)=Eπ[Gt∣St=s,At=a]
Gt=Rt+1+γRt+2+⋯+γT−t−1RT
- 우리는 궁극적으로 Policy π를 따르는 Return Gt의 기대값 Eπ[Gt∣St=s,At=a]를 구하고 싶다.
- 이때 Gt는 sample data St,At,Rt+1,St+1,…,RT,ST 를 통해 구할 수 있다.
- 그리고 기대값을 구하기 위해서는 확률 P(At,St+1,At+1,…,ST∣St,At:T−1∼π)를 알아야 한다.
그리고 해당 확률은 아래와 같이 표현할 수 있다.
P(At,St+1,At+1,…,ST∣St,At:T−1∼π)=k=t∏T−1π(Ak∣Sk)p(Sk+1∣Sk,Ak)
앞서 배운 내용과 연결해보면
E[f]=Eπ[Gt∣St=s,At=a]
p(x)=k=t∏T−1π(Ak∣Sk)p(Sk+1∣Sk,Ak)
- 우리는 원칙적으로 Policy π를 따르는 p(x)를 통해 계산을 해야 하지만 behavior policy μ를 따르는 q(x)를 통해 E[f]를 구할 수 있다.
Importance weight는 아래와 같이 설계할 수 있다.
ρtT=∏k=tT−1μ(Ak∣Sk)p(Sk+1∣Sk,Ak)∏k=tT−1π(Ak∣Sk)p(Sk+1∣Sk,Ak)=k=t∏T−1μ(Ak∣Sk)π(Ak∣Sk)
- 이때 p(Sk+1∣Sk,Ak)가 약분이 되어 transition probability를 모르더라도 연산 가능하다.
2️⃣ Off-policy Monte Carlo and Temporal Difference
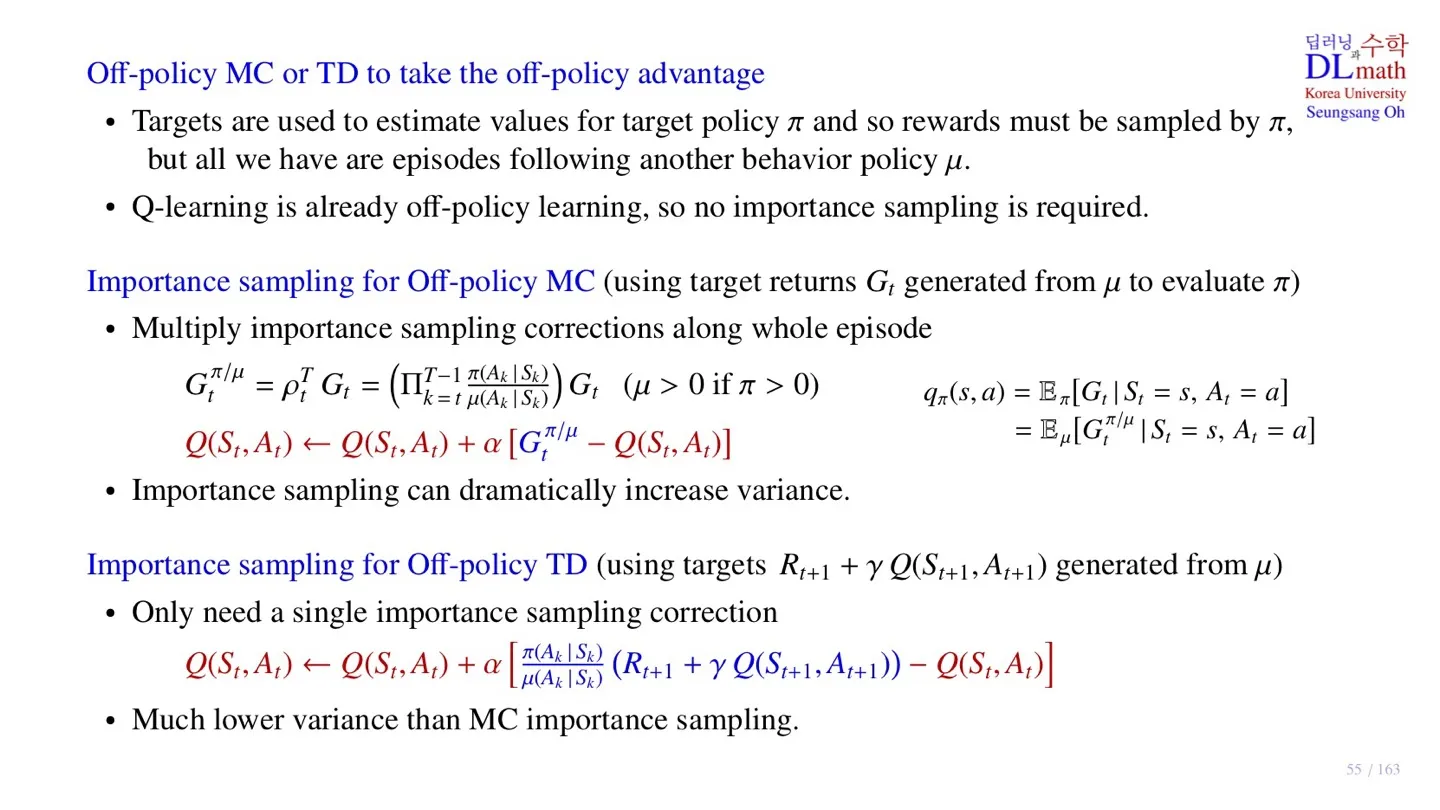
- 우리는 policy π대신에 μ를 사용하여 sample을 수집 후 업데이트를 진행할 수 있다.
- 이러한 방식을 통해 우리는 Monte Carlo와 Temporal Difference를 Off-policy로 전환할 수 있다.
🔷 Off-policy Monte Carlo
Gtπ/μ=ρtTGt=(k=t∏T−1μ(Ak∣Sk)π(Ak∣Sk))Gt(μ>0 if π>0)
=Eμ[Gtπ/μ∣St=s,At=a]
- μ(Ak∣Sk)π(Ak∣Sk) 는 stochastic한데 Π를 통해 곱해지기 때문에 variance가 크게 증가한다.
- variance가 커지면 학습과정에서 convergence가 느려진다.
🔷 Off-policy Temporal Difference
Q(St,At)←Q(St,At)+αμ(Ak∣Sk)π(Ak∣Sk)[Rt+1+γQ(St+1,At+1)−Q(St,At)]
- μ(Ak∣Sk)π(Ak∣Sk) 는 stochastic하기 때문에 variance가 증가한다.
- Monte Carlo보다는 variance가 작기 때문에 convergence가 빠르다.
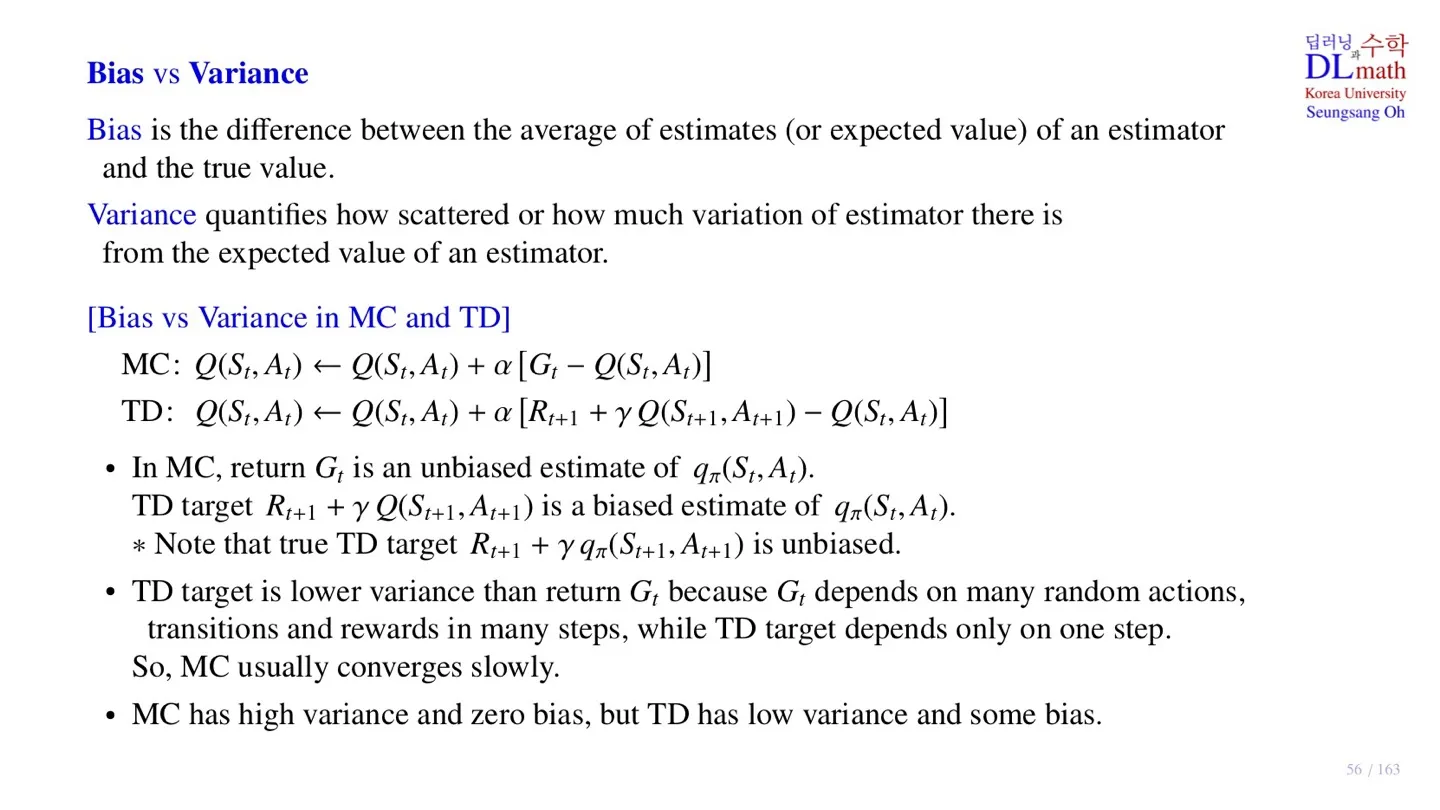
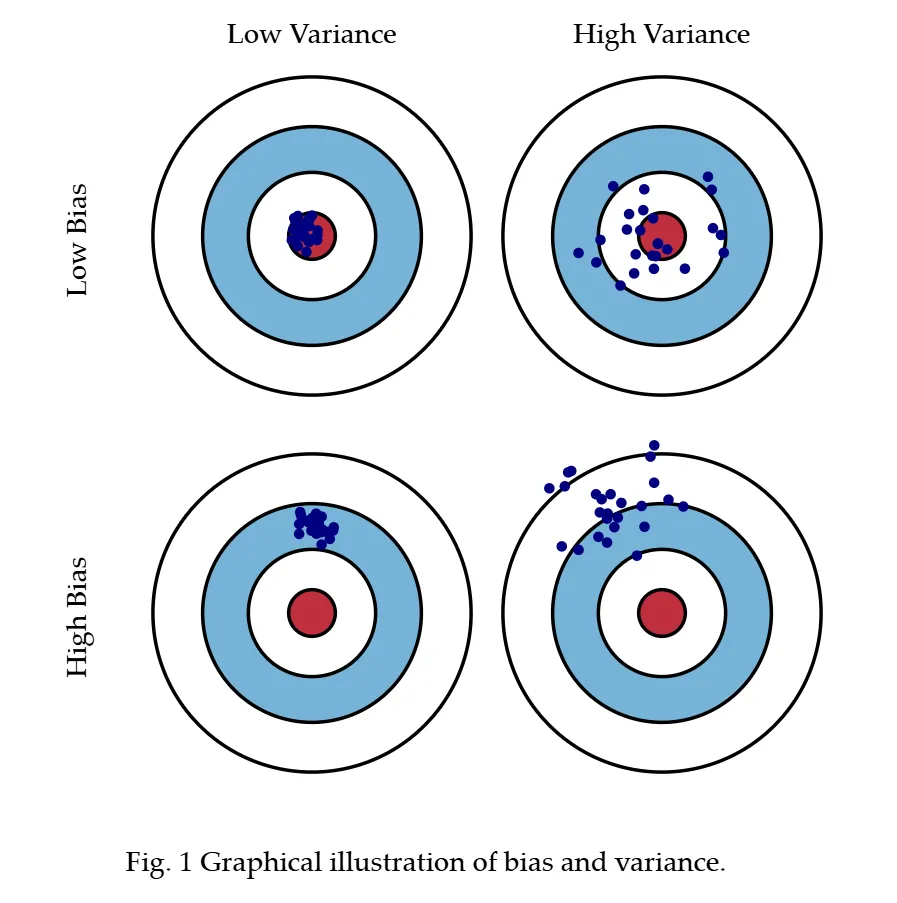
3️⃣ Bias vs Variance
우리는 계속해서 qπ(s,a)를 추정하려 하고 있다.
🔷 Bias
- 우리가 추정한 추정치의 평균값과 실제 값이 얼마나 떨어져 있는지를 의미한다.
🔷 Variance
- 우리가 추정한 추정치의 흩어진 정도를 의미한다.
🔷 Bias and Variance in MC and TD
🔻 Monte Carlo
-
Return Gt를 target으로 한다.
-
Return Gt는 qπ(s,a)의 unbiased estimate이기 때문에 Monte Carlo는 bias가 없다.
-
Gt를 추정할 때 Random성이 높은 성질이 있다.
-
Temporal Difference보다 Variance가 크다.
🔻 Temporal Difference
-
Rt+1+γQπ(St+1,At+1)를 target으로 한다.
-
Rt+1+γQπ(St+1,At+1)는 Rt+1+γqπ(St+1,At+1)의 근사치이다.
-
따라서 Rt+1+γqπ(St+1,At+1)는 qπ(s,a)의 biased estimate이다.
-
업데이트를 진행할 때 Random한 성질이 반영된다.
4️⃣ Monte Carlo VS Temporal Difference
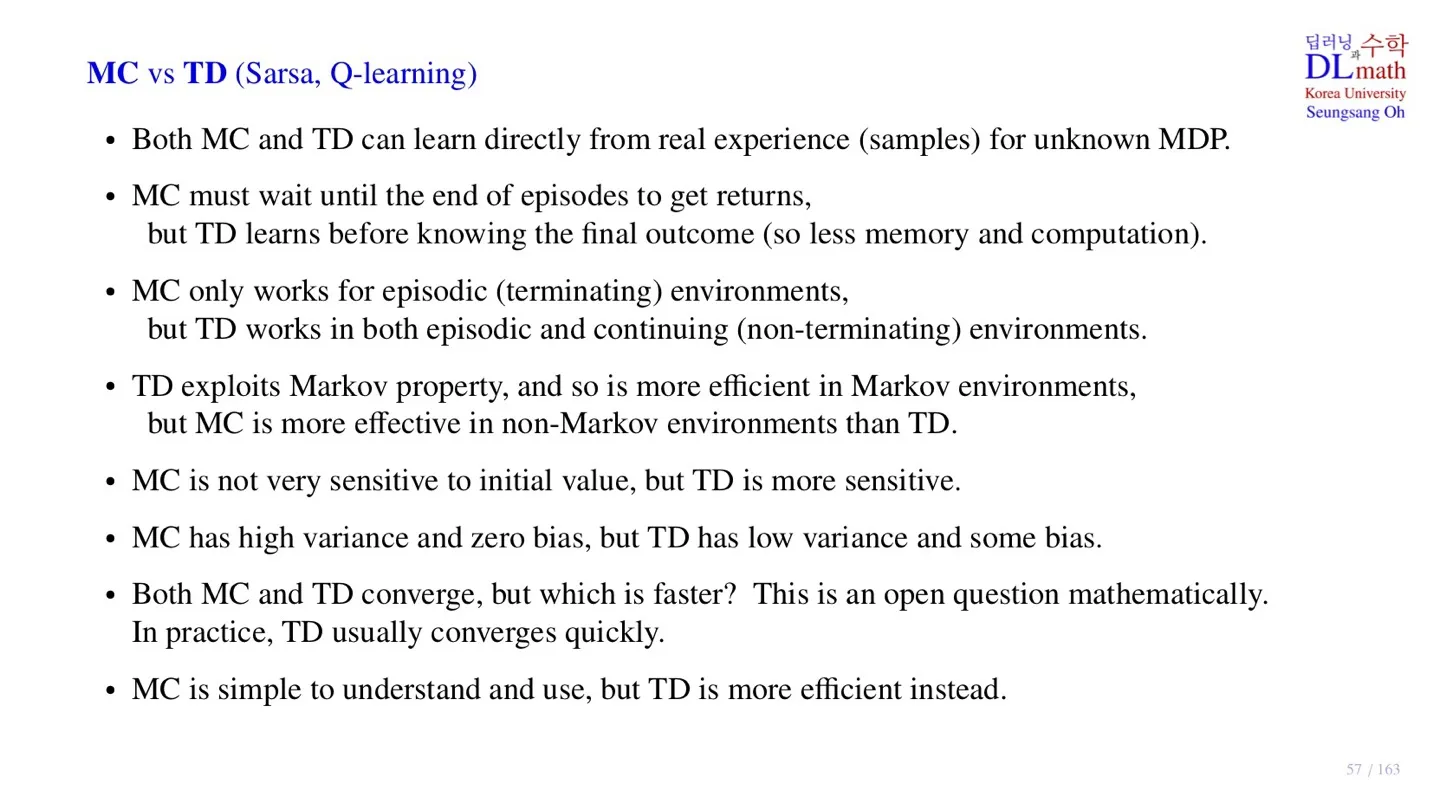
| 종류 | Monte Carlo | Temporal Difference |
|---|
| Sampe data | episode | next state |
| memory and computation | high | low |
| evironment | 끝이 있는 episode에 적용 가능 | 끝이 없는 episode에도 적용 가능 |
| Markov property | Markov property가 적어도 성능 저하가 적다. | Markov property가 성능에 큰 영향을 끼친다. |
| 초기값 | 민감하지 않다. | 민감하다 |
| Convergence 속도 | 느리다 | 빠르다 |
| 특징 | 이해하기 쉽다. 직관적이다. | 효율적이다. |
5️⃣ 정리
🔷 14강에서 배운 내용은 아래와 같다.
- Importance Sampling의 개념에 대해 배웠다.
- Monte Carlo sampling에 대해 배웠다.
- Off-policy를 적용한 Monte Carlo와 Temporal Difference에 대해 살펴보았다.
- Monte Carlo와 Temporal Difference를 Bias와 Variance 관점에서 살펴보았다.
