[Deep Reinforcement Learning] 31강 Distributional Reinforcement Learning
[Deep Reinforcement Learning]
목록 보기
30/33
👨🏫학습목표
오늘은 Distributional RL의 개념과 한계에 대해 배워볼 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=VYWdspLnhDE&t=784s
1️⃣ Distributional Reinforcement Learning
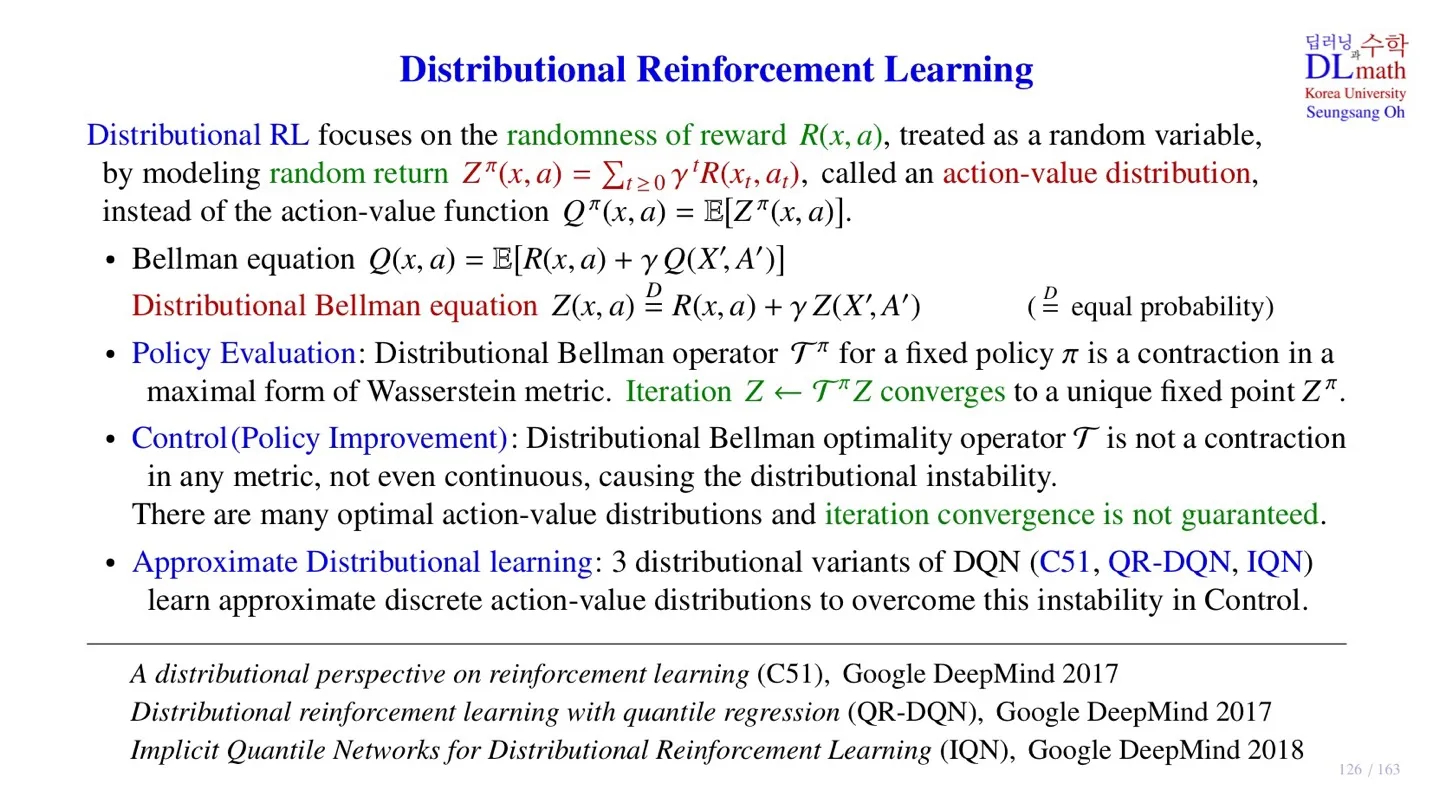
🔷 Distributional RL
- 지금까지 다뤘던 모델은 데이터를 수집할 때 state, action를 구하는 과정에서 각각 random성이 반영되었다.
- 이러한 모델은 reward는 특성한 실수값으로 다루었다.
- Distributional RL은 Reward로 random variable을 사용하여 random성을 부여하였다.
- Return 역시 Random variable의 합이라 확률 분포로 표현될 수 있다.
- 이를 Random Return이라 한다.
- Return에 expectation을 추가하여 Q-value로 만들 수 있다.
- 우리는 Random Return 을 사용하며, action-value distribution이라 부른다.
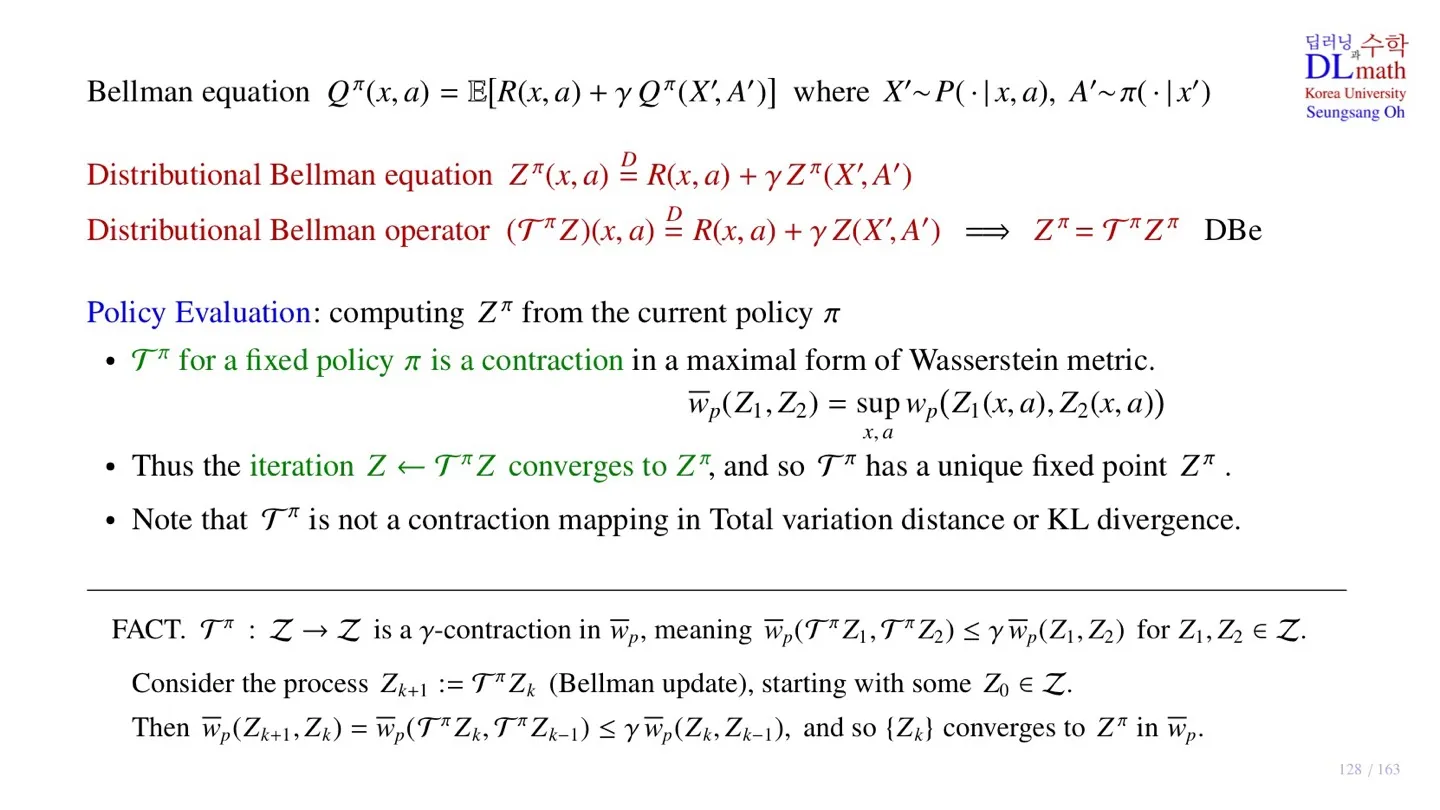
🔻 Distributional Bellman equation
- Action-value distribution에 대한 식이다.
- 지금부터는 Distribution 간의 관계를 이용하여 policy를 다룬다.
🔷 Distributional Bellman equation으로 이해
🔻 Policy Evaluation
- 주어진 policy에서 위 식을 만족하는 policy를 찾는 것이 목적이다.
- Distributional RL에서는 state를 로 표현한다.
- 우리는 모든 state, action에서 위 식을 만족하는 policy를 찾는 것이 목적이다.
- Distributional Bellman operator
- Bellman operator를 통해 업데이트된 policy를 찾는다.
- 위 과정을 Iteration 과정을 통해 하나의 로 converge한다.
🔻 Control (Policy Improvement)
- Distributional Bellman optimal equation을 사용한다.
- Distributional Bellman optimality operator 를 사용한다.
- Contraction이 없어서 distributional instability 문제가 발생한다.
- 또한 Converge된다는 보장이 없다.
- Improvement 역시 보장되지 않는다.
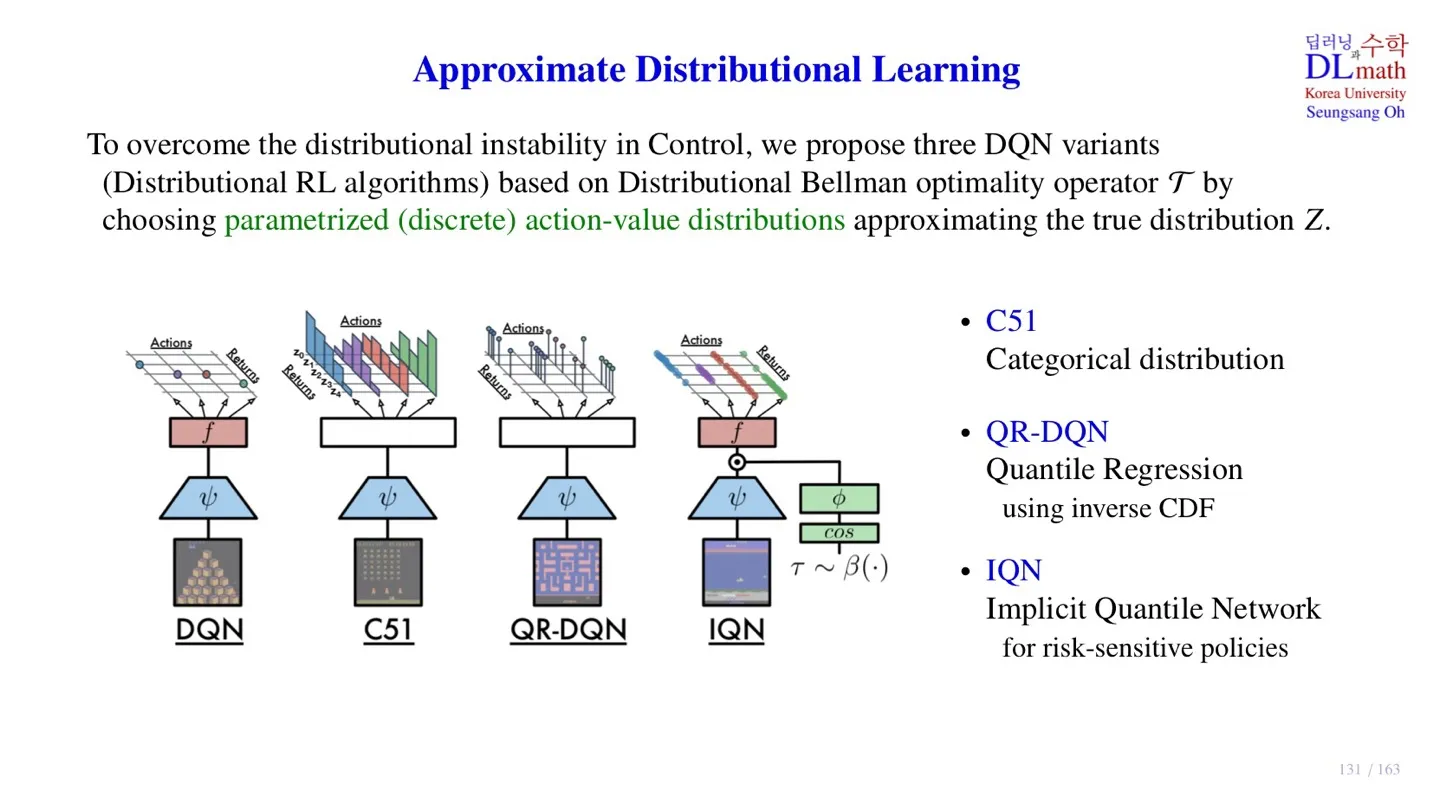
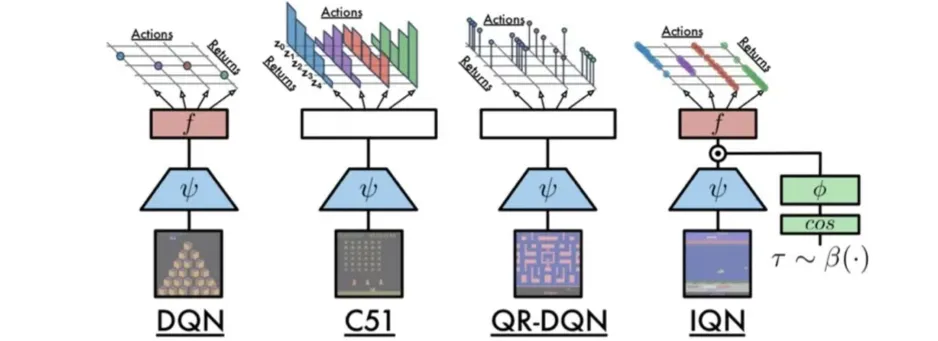
🔻 Approximate Distributional learning
- 위 과정이 practical하게 적용하기 어렵기 때문에 discrete action-value distribution을 사용한다.
- 이를 DQN에 적용한 것이 C51, QR-DQN, IQN이다.
2️⃣ Distribution을 사용하는 이유
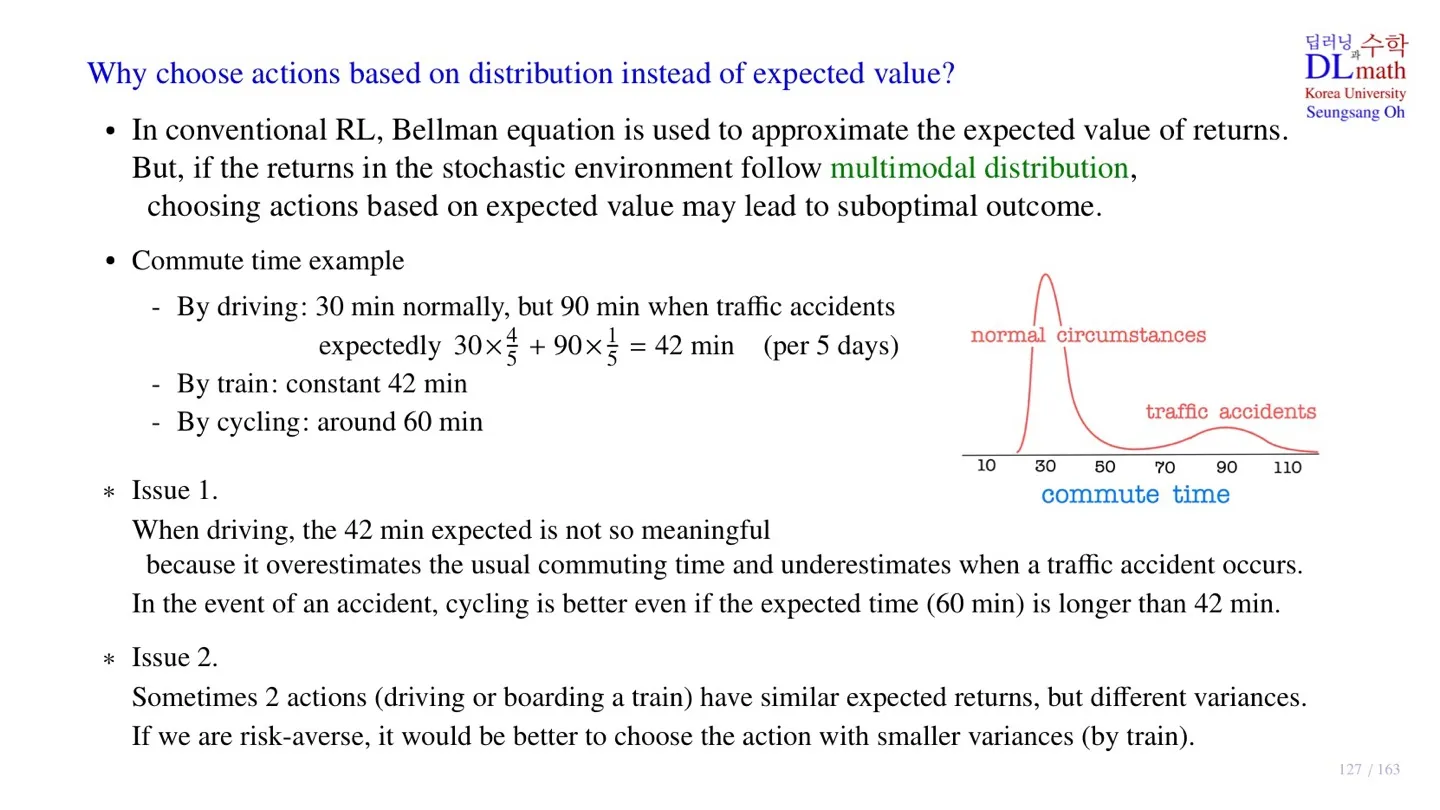
🔷 Conventional RL
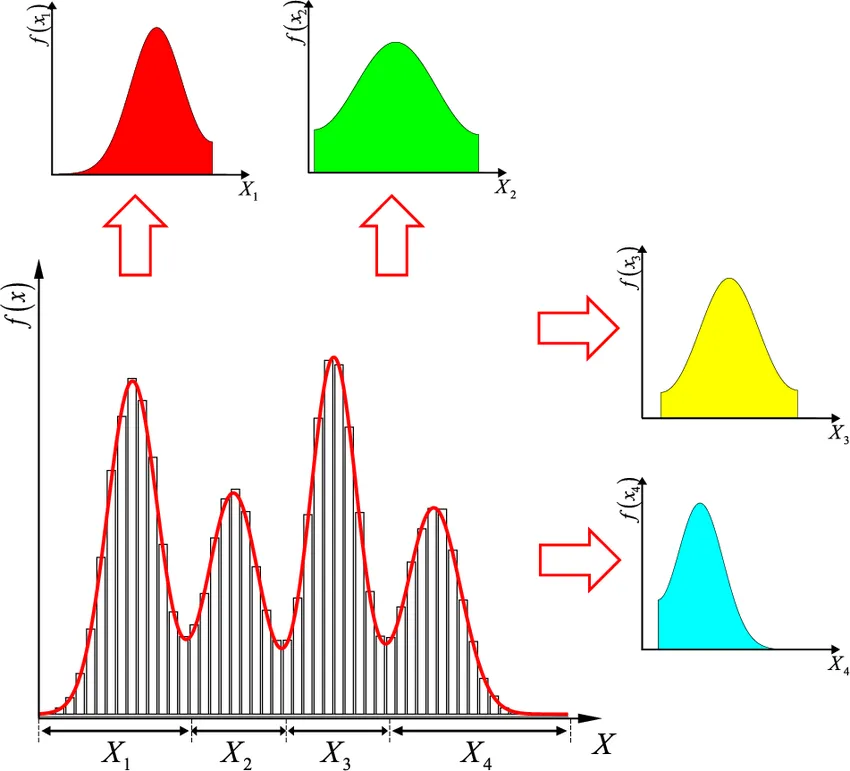
출처: https://www.researchgate.net/figure/The-decomposition-of-multimodal-distribution_fig2_371345550
- 기존의 모델들은 Bellman equation에 따라 return의 기대값을 사용한다.
- 이때 사용하는 Return이 stochastic하여 multimodal distribution을 따를 수 있다.
- Distribution에서 극대값을 mode라고 하는데, mode가 2개 이상인 분포를 multimodal distribution이라 한다.
- 그렇다면 expectation을 사용하는 것은 optimal이 아닌 sub-optimal한 값에 도달할 수 있다.
🔷 예시를 통한 문제점 이해
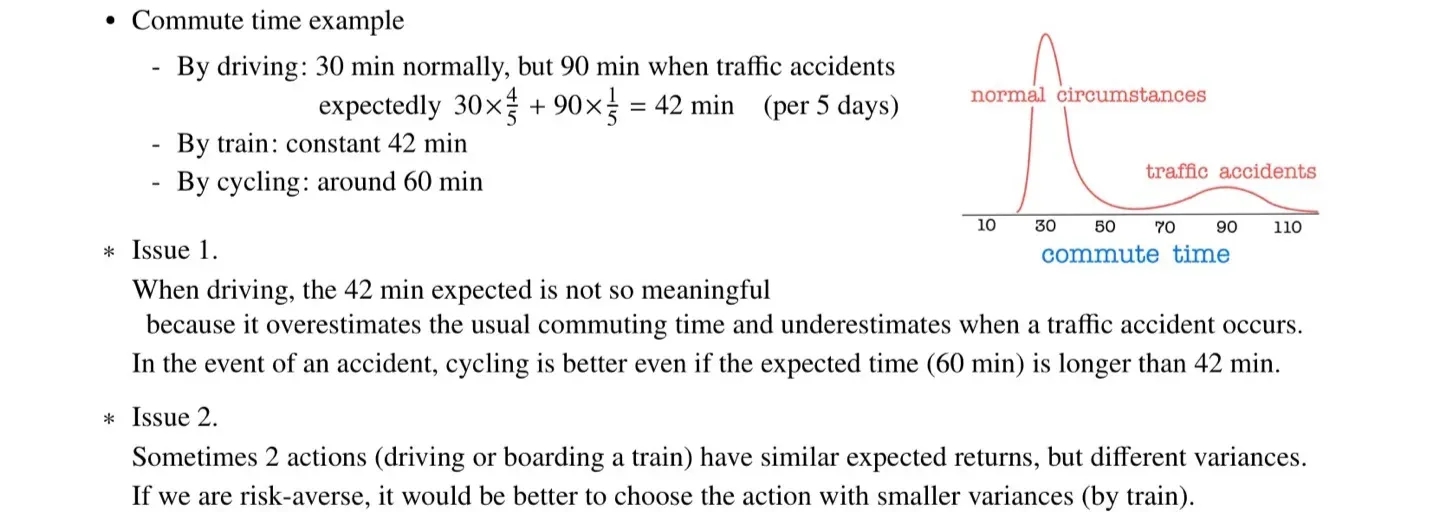
🔻 Issue 1
- 예시에 나타난 운전자의 운전시간은 30분이거나 90분이다.
- 따라서 운전시간에 대한 기대값 42분은 유의미한 정보를 제공하지 않는다.
🔻 Issue 2
- 운전과 기차 모두 expectation이 같다.
- 하지만 두 값의 분산이 다르기 때문에 risk한 상황을 피하고 싶다면 기차를 선택하는 것이 더 안전한다.
- Expectation을 통해서는 이러한 상황을 알 수 없지만, distribution을 사용하면 이러한 정보도 알 수 있다.
따라서 우리는 Action을 선택할 때, distribution을 사용하는 것이 더 좋을 수 있다.
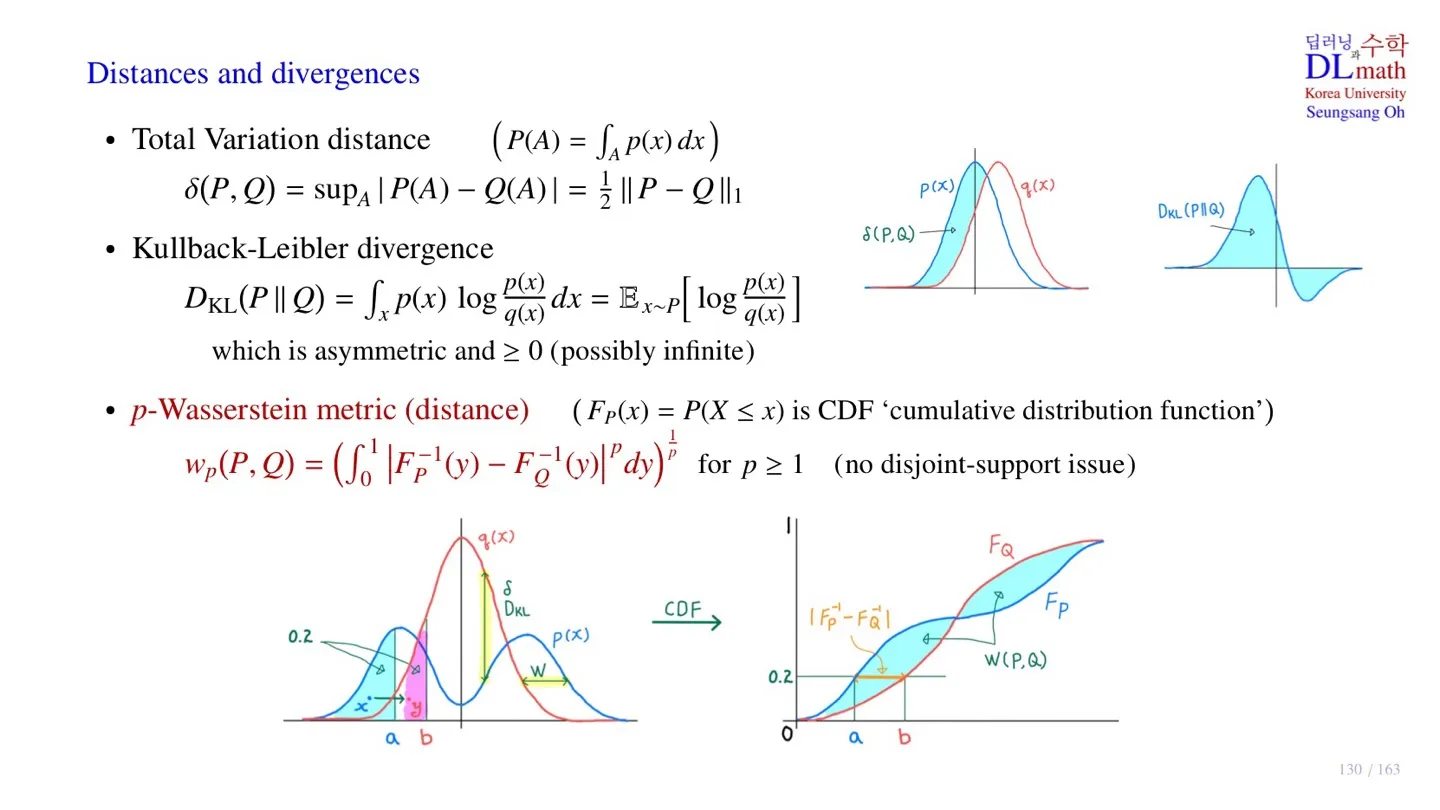
3️⃣ p-Wasserstein metric
🔷 Metric의 조건
🔻 Distance
- 거리 개념이기 때문에 0 이상이어야 한다.
- 확률분포 와 가 almost everywhere 같아야 한다.
🔻 Symmetric
- P에서 Q까지의 거리와 Q에서 P까지의 거리가 같다.
🔻 Triangular inequality
🔷 Divergence
- Metric의 2번째 조건을 만족하지 않는다.
🔷 p-Wasserstein metric
🔻 등장하게 된 배경

- 현재 distribution 과 는 와 멀리 떨어져 있다.
- 이때는 과 의 Total Variation distance와 Kullback-Leibler divergence가 크게 차이나지 않는다.
- Distribution 를 로 학습시키려고 할 때, 우리는 에서 으로 이동할 때 metric이 줄어들길 바란다.
- 그래서 stribution 를 로 이동시키기 위해 설계된 metric이 Wasserstein metric이다.
🔻 핵심 아이디어

- 각 확률분포의 분위수 값이 같아지도록 distrance를 설계한다.
- 각 분위수가 동일한 면적을 차지하기 때문에 누적분포의 x값 거리가 줄어들도록 하는 것이다.
- CDF 사이의 거리를 모두 합하면 면접이 되고, 우리는 이 면적의 크기가 줄어드는 방향으로 학습을 수행할 수 있다.
🔻 Wasserstein metric의 장점
- 분포가 너무 멀어서 Total Variation distance가 변하지 않는 문제를 해결할 수 있다.
- Kullback-Leibler divergence에서 분모에 0이 들어가는 문제를 해결할 수 있다.
4️⃣ Wasserstein metric
🔷 Distributional Bellman equation
- 확률 분포를 사용하여 관계를 나타내며, expectation을 사용하지 않는다.
🔷 Policy Evaluation
- 모든 state, action 데이터에 대하여 distributional Bellman equation을 만족하는 를 찾는 것이 목적이다.
🔻 Distributional Bellman operator
- 위 과정을 operator를 사용하면 편리하게 수행할 수 있다.
- 위 operator에 state와 action을 대입한 것은 Random reward와 주어진 policy에서 next state , next action 에 대한 Return의 합을 구한 것이다.
🔻 Policy Evaluation
- Policy 가 주어졌을 때, 해당 policy의 operator 가 Wasserstein metric의 maximual form 안에서 contraction이 된다.
- 는 state, action이 들어오면 어떤 distribution이 된다. 즉 확률분포가 된다.
- 우리는 두 분포 사이에 Wasserstein metric을 정의할 수 있다.
- 이를 통해 우리는 모든 state, action에 대하여 두 확률분포의 거리를 구할 수 있다.
- 우리는 이 distance의 상한을 구할 수 있다.
- 두 확률분포 사이의 Wasserstein metric을 제한할 수 있다.
- operator를 적용하여 업데이트 된 Return을 구할 수 있다.
- 라면 operator를 적용할 경우, 기존의 distance의 0.9배보다 더 작아졌다.
- 해당 과정을 반복하여 converge 할 수 있다.
- 따라서 operator를 통해 Distributional Bellman equation을 만족하면서, Wasserstein metric을 통해 converge를 이끌어낼 수 있다.
5️⃣ Control
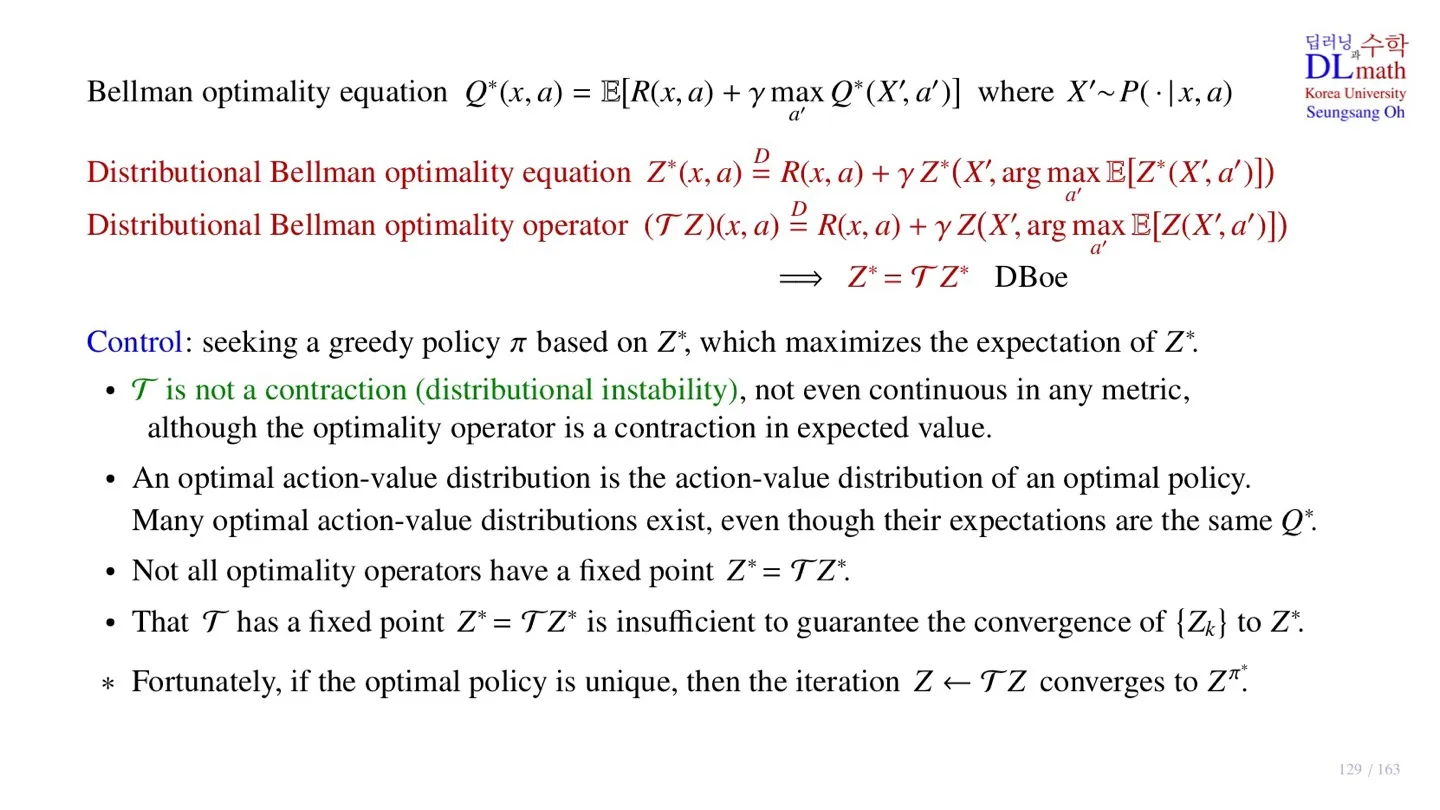
🔷 Distributional Bellman optimality equation
- Return 은 distribution으로 바뀐다.
- Reward 역시 distribution으로 바뀐다.
🔷 Distributional Bellman optimality operator
- Optimality 역시 operator를 정의할 수 있다.
- Optimal한 연산은 특정 policy를 다루지 않기 때문에 를 사용하지는 않는다.
🔷 Control
- Control에서는 optimal policy를 찾는 것이 목적이다.
- Operator를 통해 를 구할 수 있고, 의 expectation을 통해 를 구할 수 있다.
- 우리는 를 maximize하는 action을 선택하는 optimal policy를 구할 수 있다.
- 이를 위해서는 operator가 contraction이 되어야 한다.
🔻 Distributional Bellman optimality operator의 문제점
- Contraction하지 않는다.
- 이를 distributional instability라고 한다.
- 어떤 metric을 사용하여도 continuous하지 않다.
- 또한 많은 optimal action-value distribution이 존재한다.
- 다만 optimal policy가 unique하다면policy로 이때는 optimal converge한다.
이러한 다양한 문제를 극복하기 위해 Approximate Distributional Learning을 사용한다.
6️⃣ Approximate Distributional Learning
🔷 Distributional Reinforcement Learning
- Policy evaluation 단계에서 Wasserstein metric을 사용해야 한다.
- Control 단계에서 distributional instability가 발생한다.
🔷 DQN
- 기존의 DQN은 입력으로 state를, 출력으로 Q-value를 반환한다.
- Q-Network를 사용한다.
- 이때 Action의 개수가 finite하다
🔷 DQN 변형
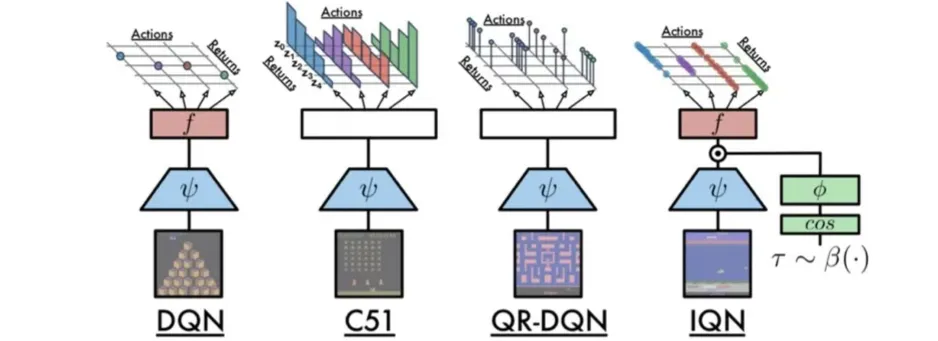
- 각 Action별로 distribution 이 표현된다.
- 하지만 continuous한 distribution을 출력하기 어렵기 때문에 discrete action-value distribution을 출력한다.
7️⃣ 정리
🔷 31강에서 배운 내용은 아래와 같다.
- Distribution으로 reward를 다루면 더 많은 정보를 활용할 수 있다.
- Distribution으로 데이터를 처리할 경우 contraction하기 힘들다는 한계가 존재한다.
- 기존 DQN을 변형하여 distribution을 출력할 수 있도록 설계한다.

I'm curious about AI