👨🏫학습목표
오늘은 PPO의 핵심 아이디어와 pratical하게 적용하기 위한 방법에 대해 배워볼 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=5fHbx33bqBc&t=1719s
PPO 논문: https://arxiv.org/pdf/1707.06347
1️⃣ Proximal Policy Optimization
📕 지난시간에 배운 내용
-
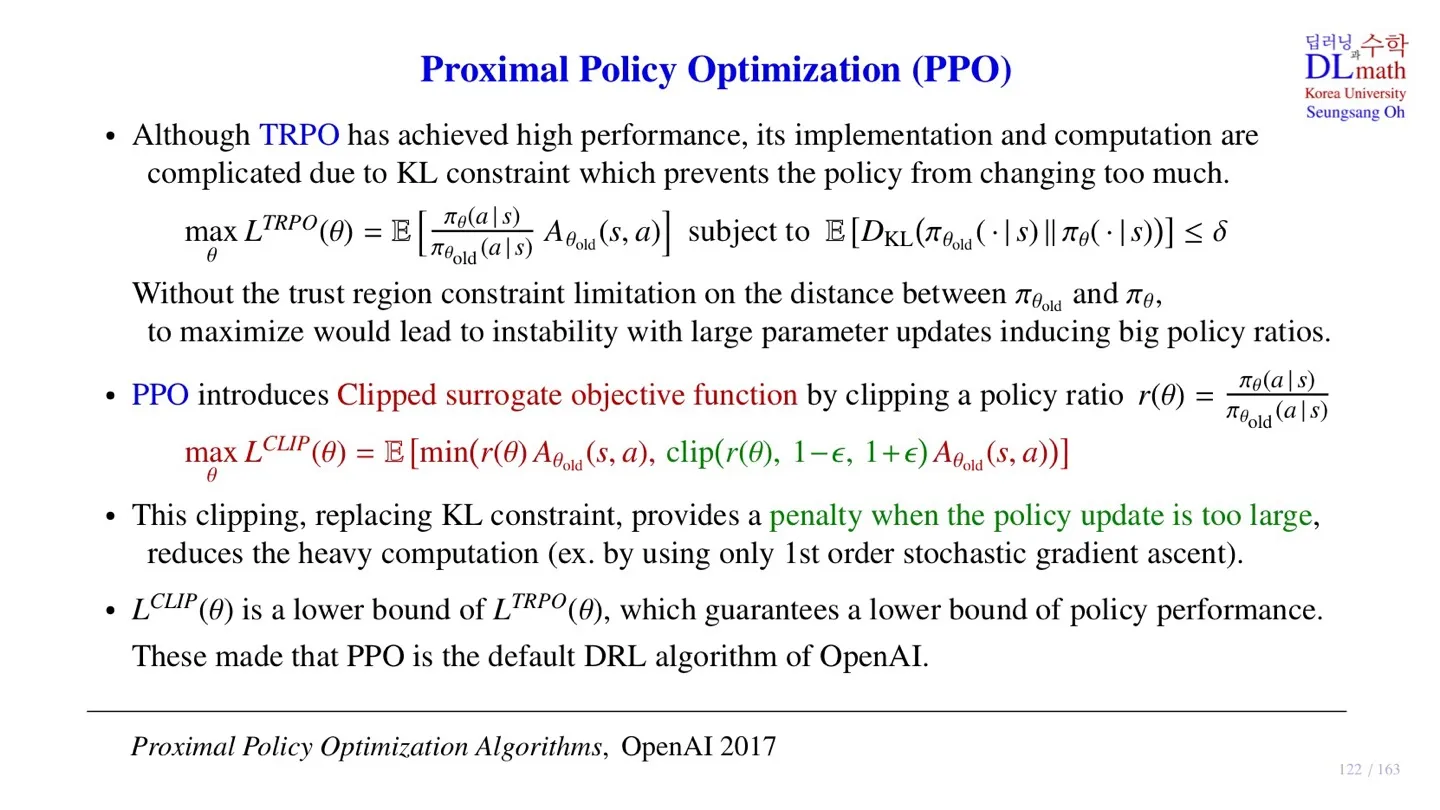
TRPO의 surrogate object function이다.
-
를 maximize하는 파라미터를 찾는다.
-
KL Constraint
-
KL Constraint가 Trust region 역할을 수행한다.
-
TRPO는 좋은 성능을 가지고 있는 모델이다.
-
이를 통해 Policy가 monotonic improvement를 잘하는 것을 알 수 있다.
🔷 Policy ratio
-
policy ratio는 파라미터의 변화를 결정한다.
-
TRPO에서는 Trust region을 통해 그 변화를 제한한다.
-
Trust region을 구현하기 위해 KL constrant 식을 만들었고 그 결과 Implementation과 Computation이 복잡해졌다.
-
KL constraint는 이 값이 너무 커지는 것을 막아주는 것이 목적이다.
-
PPO는 KL constraint를 사용하지 않고, policy ratio에 직접적으로 제한을 한다.
-
이를 clipping이라고 한다.
🔷 Clipping
- 파라미터의 변화가 크면 는 1보다 크거나 작은 값으로 변할 것이다.
- Clipping을 통해 그 범위를 제한할 수 있다.
- 이를 통해 policy update가 크게 진행되는 것을 막을 수 있다.
- 그 결과 Hessian 로 이루어진 Constraint 식을 사용하지 않아도 된다.
-
Clipping을 통해 first order stochastic gradient ascent를 사용한다.
-
연산량을 획기적으로 줄일 수 있다.
-
Surrogate objective function이 되기 위해서는 lower bound라는 조건을 만족해야 한다.
-
따라서 기존의 식과 새로 구한 식의 minimum을 구하여 가 의 lower bound가 되게 한다.
🔻 MM-algorithm을 적용하기 위한 조건
🔸 Surrogate objective function이 되기 위한 조건
2️⃣ PPO
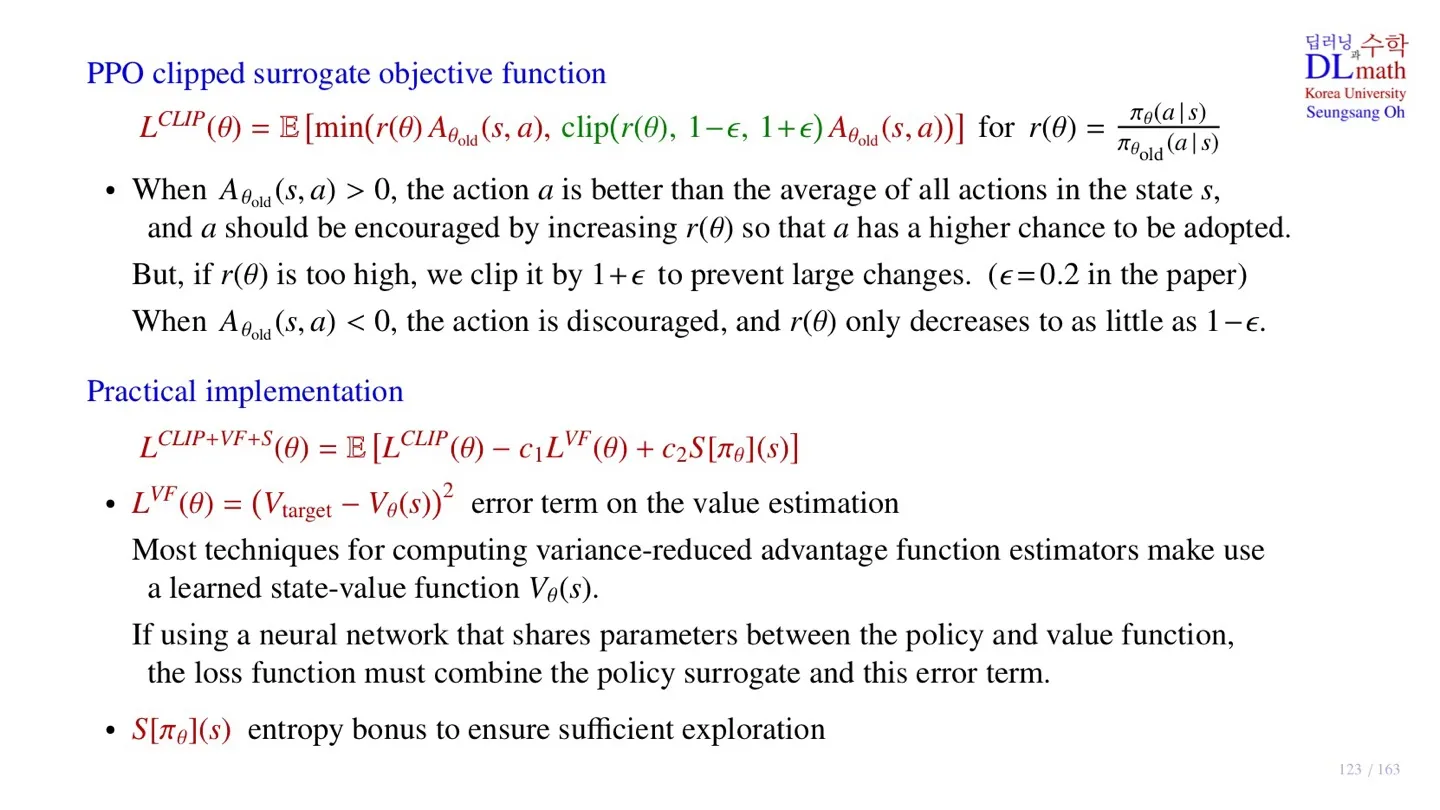
🔷 Clipped surrogate objective function
-
-
해당 action이 평균보다 좋은 action이기 때문에 더 높은 확률로 발생할 수 있도록 학습해야 한다.
-
따라서 을 만족해야 한다.
-
다만 그 값이 너무 크게 변하면 안되기 때문에 을 통해 범위를 제한한다.
-
논문에서 로 고정하였다.
-
이면 1.2로 clipping 한다.
-
이면 0.8로 clipping 한다.
-
이때는 이 된다.
-
Lower bound 조건을 만족하기 위해서다.
🔷 Practical Implementation
-
각 항을 얼마나 반영할 지 결정하는 하이퍼파라미터.
-
Error term on the value estimation
-
Advantage value를 구하기 위해서는 state value값이 필요하다.
-
보통 Q-value와 State value는 구하는 파라미터를 공유하여 추출한다.
-
이때 Loss function에 Error term을 추가하면 훨씬 안정적인 학습이 가능하다.
-
Entropy bonus to ensure sufficient exploration
-
모델이 Exploration을 더 할 수 있도록 추가한 항이다.
3️⃣ DRL algorithm 비교

🔷 SARSA & Q-Learning
- Q-table 을 이용하여 모든 Q-value 값을 저장한다.
- State space와 Action space가 discrete하고 크지 않은 경우에만 적용된다.
🔷 DQN
- Q-Network를 사용하여 State space를 continuous하게 확장하였다.
🔷 A3C, DDPG
- Network를 통해 policy를 구현하였다.
- Action space가 Continuous한 영역으로 확장되었다.
- 로보틱스에 적용할 수 있게 되었다.
🔷 TRPO
- DDPG가 monotonic하게 성능이 향상될 수 없다는 한계를 극복한 모델이다.
- Surrogate objective function을 구한 후 MM-algorithm을 적용하여 모델의 성능을 향상시켰다.
- 하지만 KL divergence constraint 항의 연산량이 많다는 한계가 존재한다.
🔷 PPO
- KL divergence constraint 대신 Clipping을 통해 step size를 조절하였다.
- 이를 통해 monotonic improvement를 확보한 동시에 연산량을 줄였다.
4️⃣ 정리
🔷 30강에서 배운 내용은 아래와 같다.
- TRPO의 한계를 극복하기 위해 PPO에서는 Clipping을 적용하였다.
- PPO를 practical하게 구현하기 위해 Error term과 Entropy bonus를 더하였다.
- Error term은 State value값을 잘 추정할 수 있도록 한다.
- Entropy bomus는 모델이 exploration을 늘릴 수 있도록 한다.
