👨🏫학습목표
오늘은 IQN에 대해 배워볼 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=RihBHbp9dBA&t=2123s
IQN 논문: https://arxiv.org/pdf/1806.06923
1️⃣ IQN
📕 지난 시간에 배운 내용
-
Distribution Bellman equation을 통해 학습을 할 때 많은 metric에서 contraction이 되지 않는다는 한계가 존재한다.
-
Wasserstein metric을 통해 contraction을 확보할 수 있다.
-
하지만 Wasserstein metric은 SGD가 적용되지 않기 때문에 적용하기 어렵다는 한계가 존재한다.
-
또한 DQN은 continuous한 출력을 반환할 수 없다는 한계가 존재한다.
-
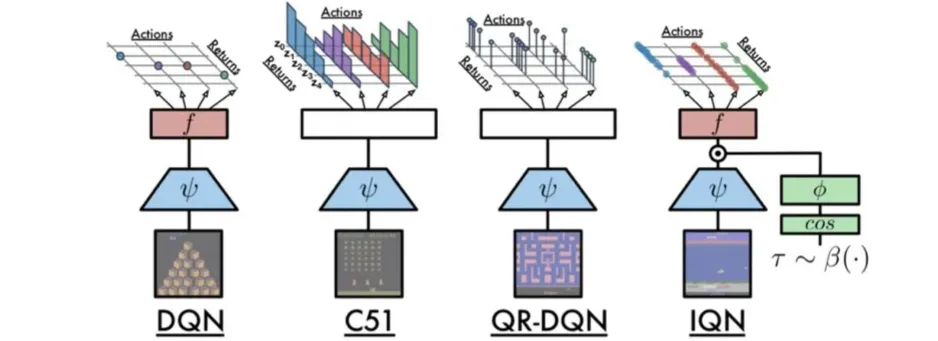
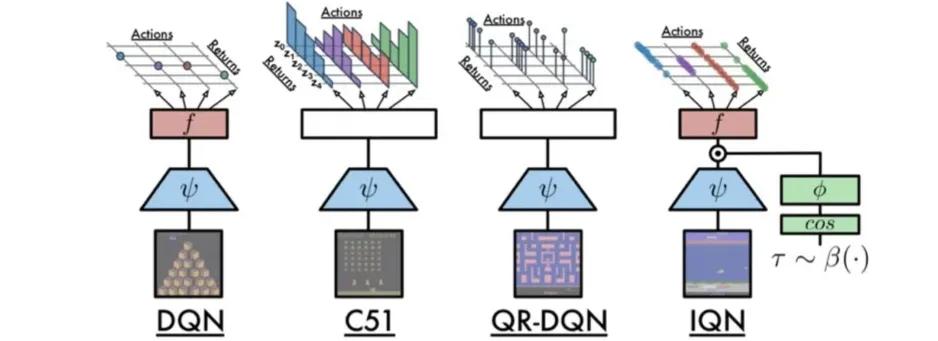
C51과 QR-DQN, IQN 모두 discrete distribution을 반환함으로써 이러한 한계를 극복한다.
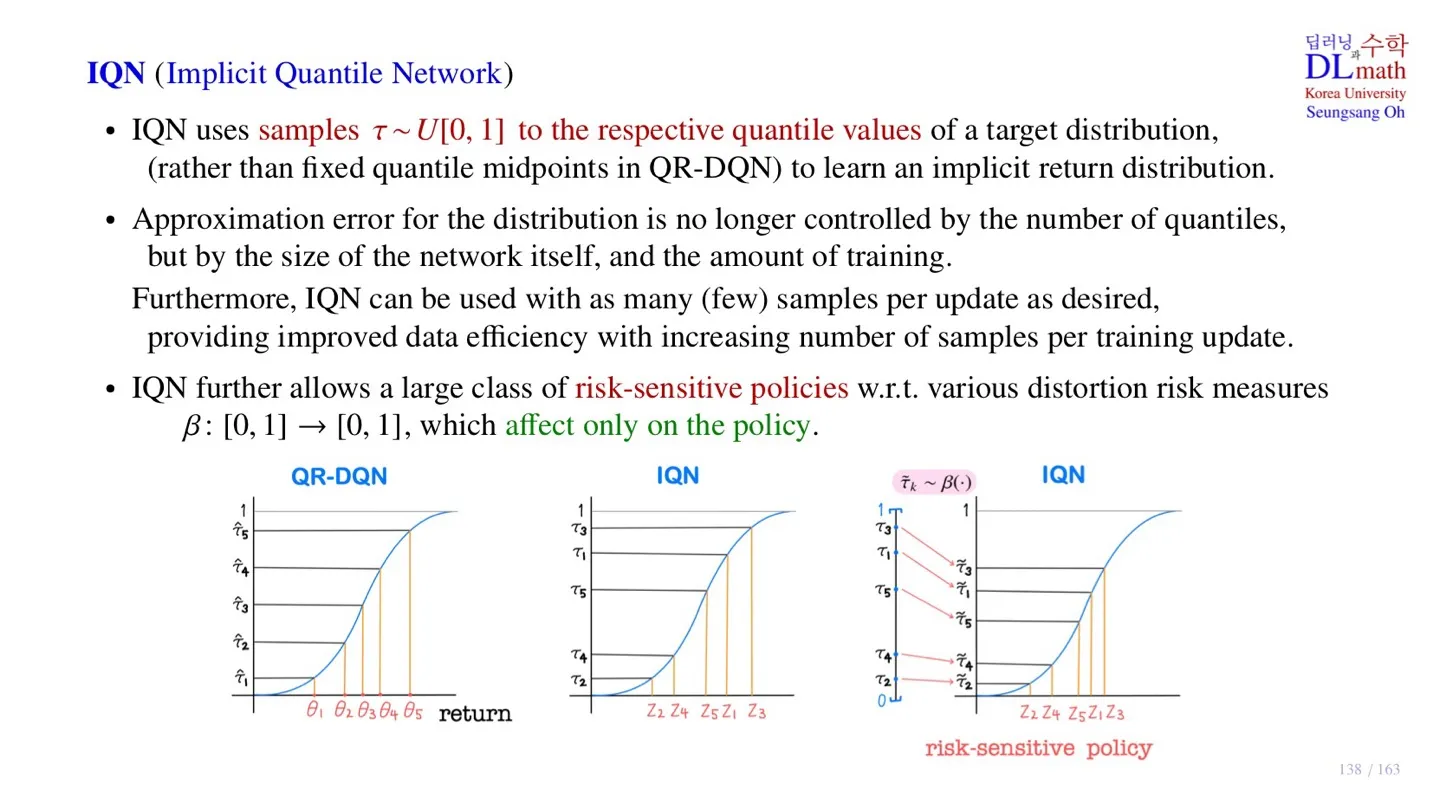
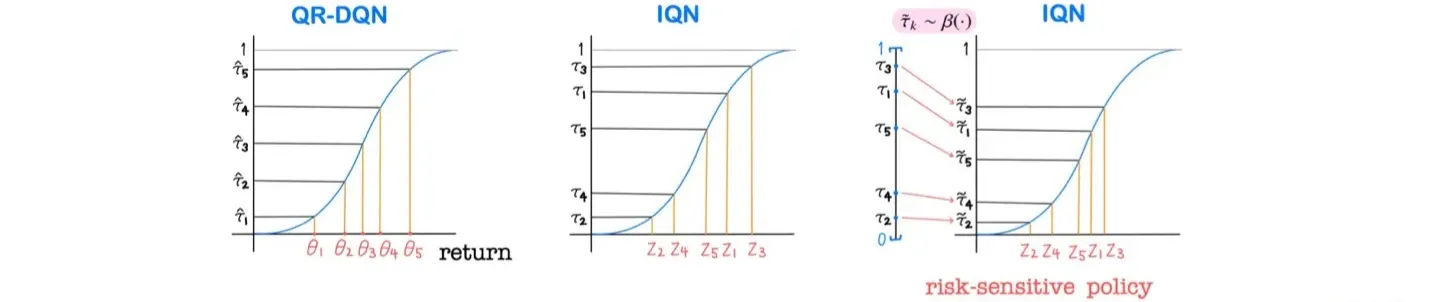
🔷 Implicit Quantile Network
-
QR-DQN의 Implicit 버전의 모델이다.
-
Target distribution을 예측하기 위한 quantile point를 sampling을 통해 결정한다.
-
Sampling을 하기 때문에 Quantile의 개수 에 영향을 받지 않는다.
-
Approximation error는 신경망의 크기나 학습 데이터의 크기에 영향을 받는다.
-
또한 를 이용하여 특정한 종류의 policy를 만들 수 있다.
2️⃣ Risk-Sensitive Reinforcement Learning
🔷 Greedy policy
- 지금까지 우리는 최적의 action을 선택하는 Greedy policy를 사용하였다.
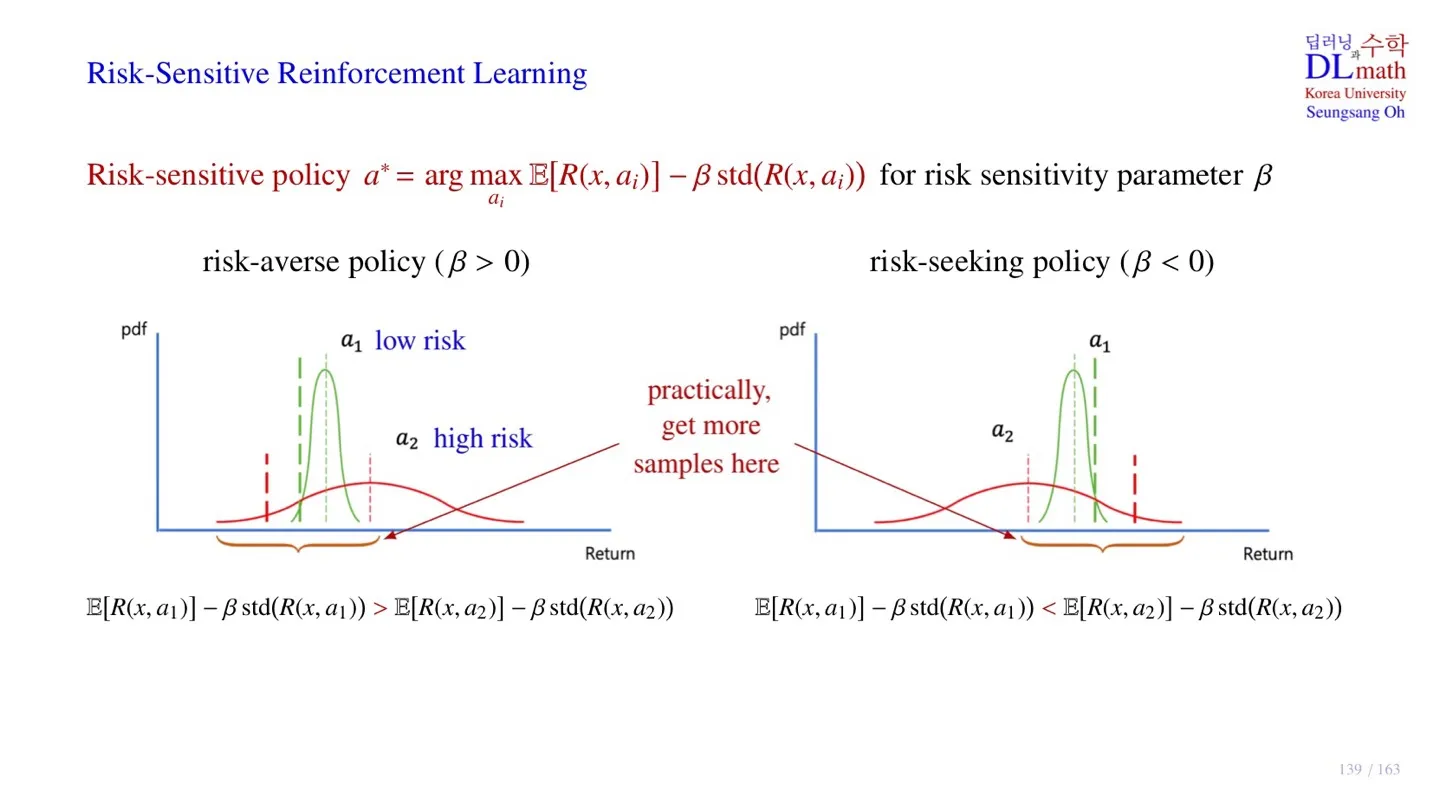
🔷 Risk-sensitive policy
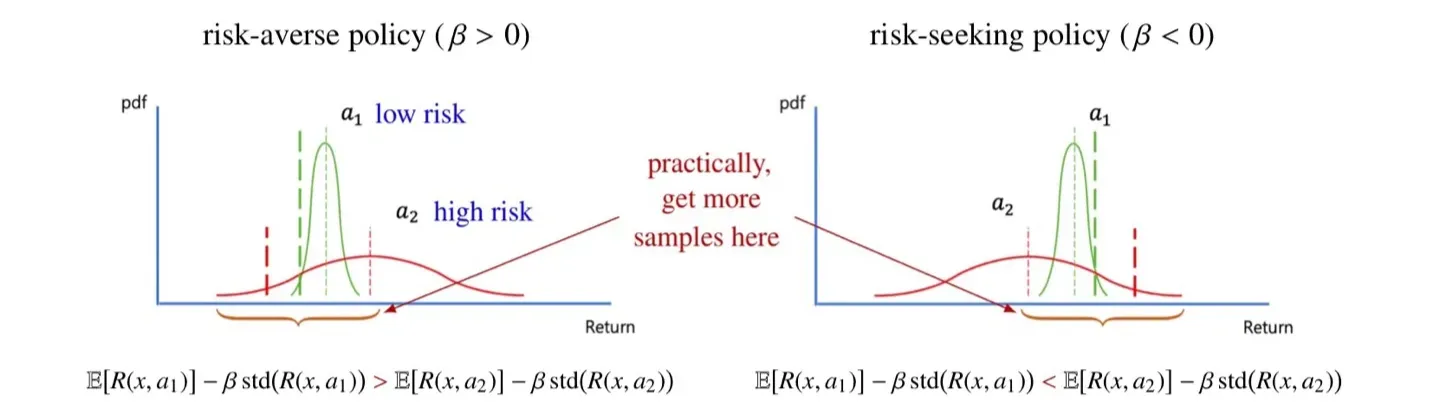
- Low risk에서는 Return값의 variance가 작다.
- High risk에서는 Return값의 variance가 크다.
🔻 Risk-averse policy
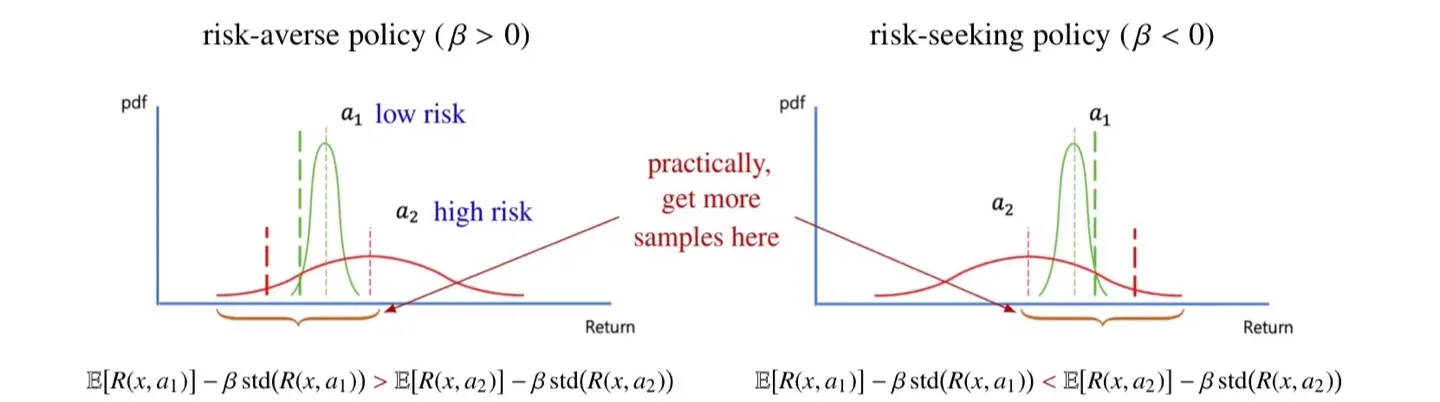
- Expectation만 비교했을 때는 가 그 값이 더 크다.
- 하지만 Standard error를 뺄 경우 값의 크기가 더 크다.
- 따라서 해당 식을 사용하면 평균적인 return값은 작지만 variance가 작은 이 next action으로 선택된다.
🔻 Risk-seeking policy
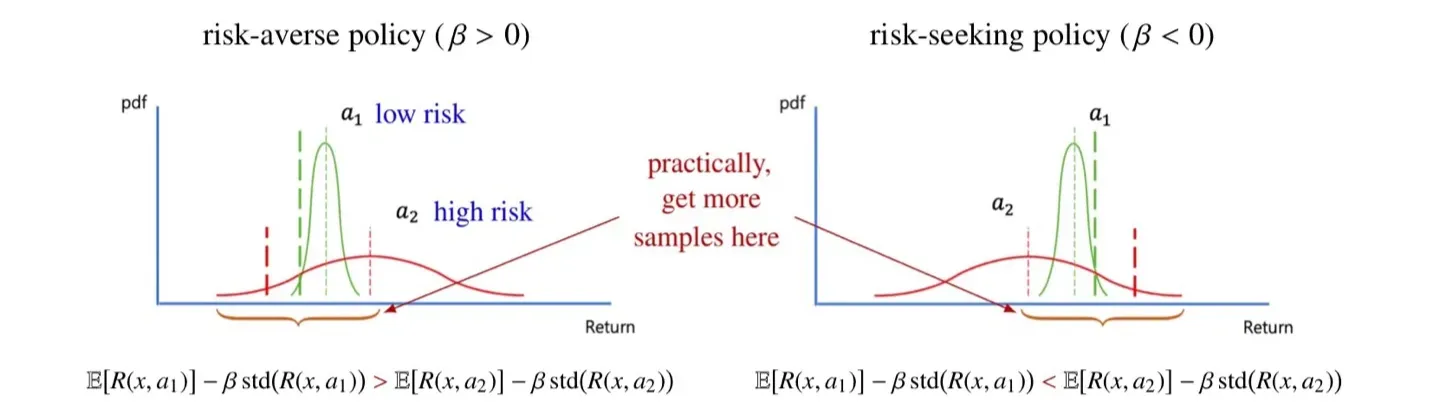
- Expectation만 비교했을 때는 가 그 값이 더 크다.
- 하지만 Standard error를 뺄 경우 값의 크기가 더 크다.
- 따라서 해당 식을 사용하면 평균적인 return값은 작지만 variance가 큰은 이 next action으로 선택된다.
- 는 평균적인 return은 작지만 운이 좋으면 더 큰 return을 얻을 수도 있다.
🔻 Practical algorithm
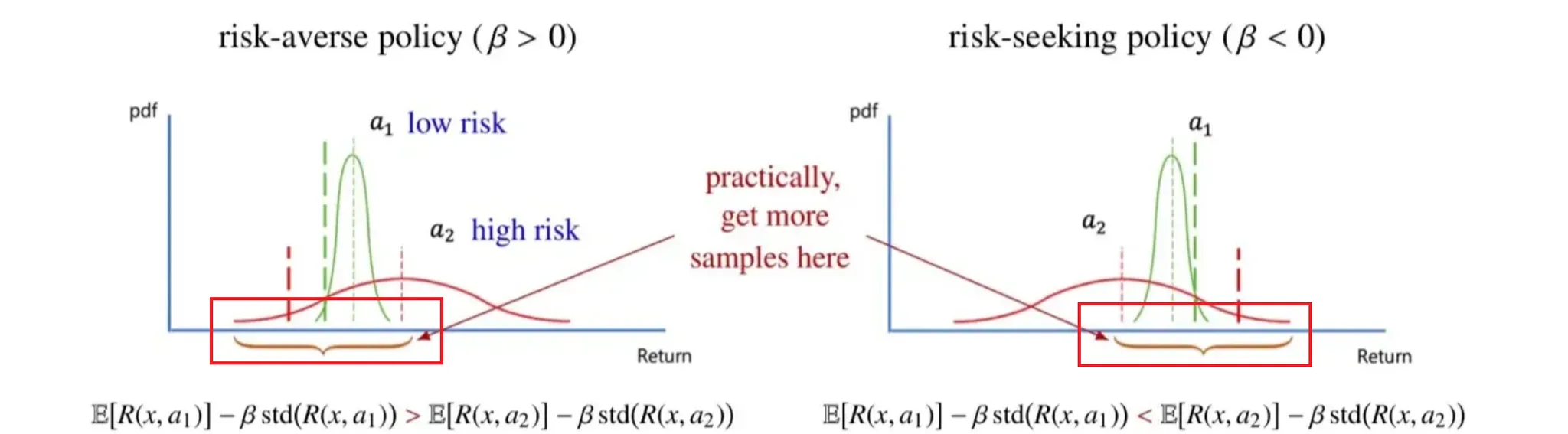
- 강화학습에서는 실제로 standard error를 빼지 않고, 해당 영역만에서 sampling을 하는 방식으로 구현한다.
3️⃣ Distortion risk measure
🔷 Distortion risk measure
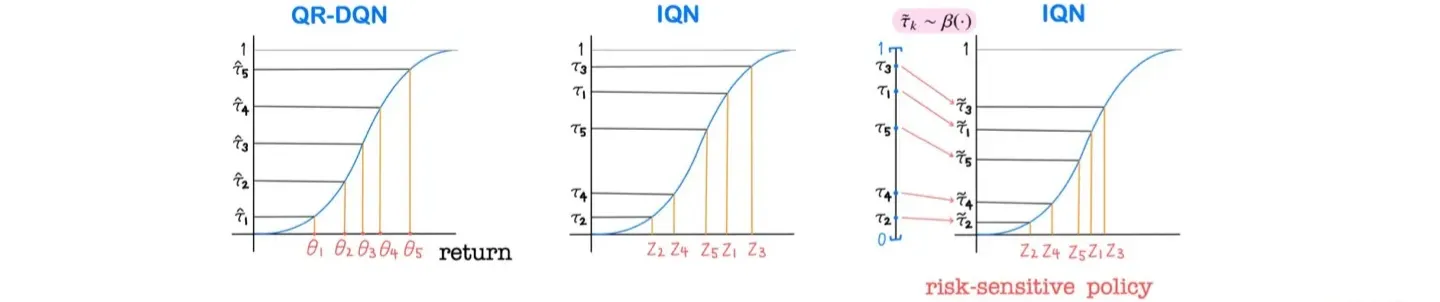
- 특정 영역에서 Sampling을 할 수 있도록 값을 조정한다.
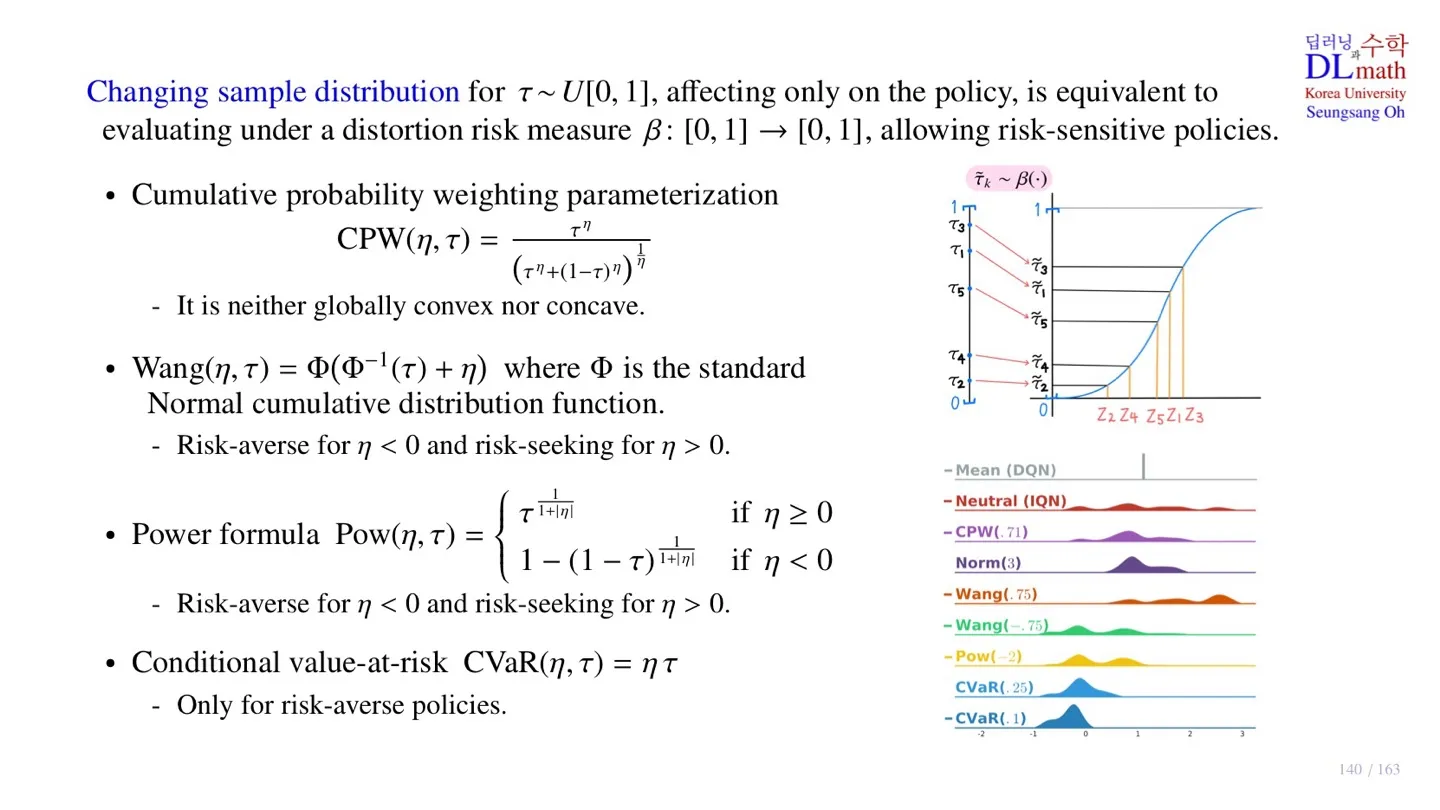
🔷 Cumulative probability weighting parameterization
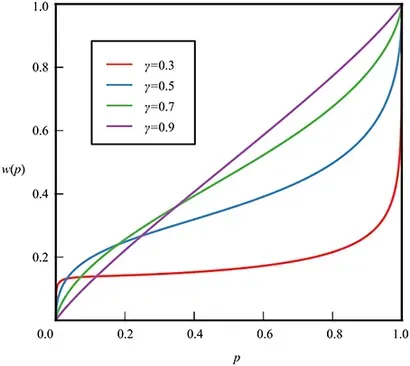
출처: https://www.frontiersin.org/journals/psychology/articles/10.3389/fpsyg.2016.00778/full
- 얼마나 왜곡할지 결정하는 하이퍼파라미터
- Quantile value 가 입력되면 위 식을 통해 변형한다.
-
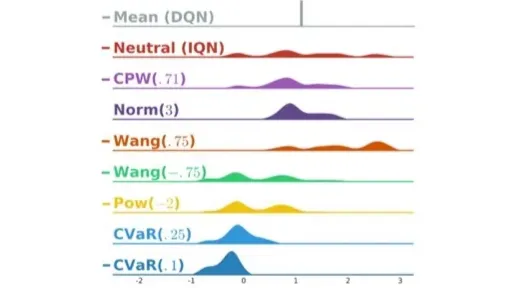
현재 Return의 expectation이 1로 되어 있다.
-
Neutral IQN은 distortion risk measure를 사용하지 않고 sampling한 것이다.
-
CPW는 로 Return값이 조금 더 가운데로 몰려있는 형태이다.
-
다른 분포도 마찬가지로 각자 만의 식을 통해 분포를 변형한다.
4️⃣ IQN의 Implementation
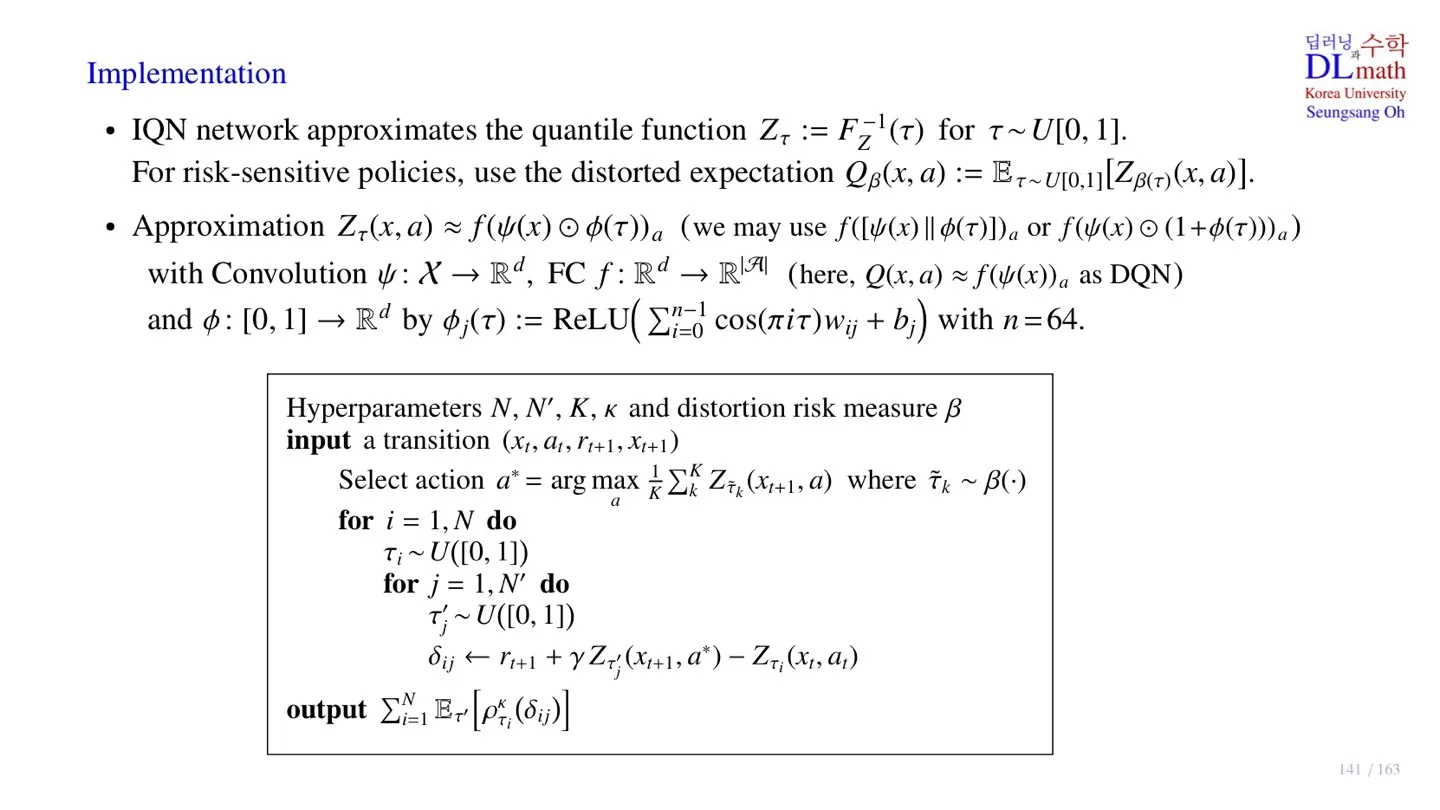
🔷 IQN의 데이터 처리
- IQN은 quantile function 를 학습한다.
- IQN은 입력으로 state 외에도 quantile value를 받는다.
- 각 action에 대해 해당 quantile의 return 값 하나만 출력된다.
🔷IQN의 구조
- DQN에서 살펴본 CNN을 의미한다.
- Fully-connected Network를 의미한다.
- Quantile 정보를 추가로 입력받는다.
🔸 DQN 구조
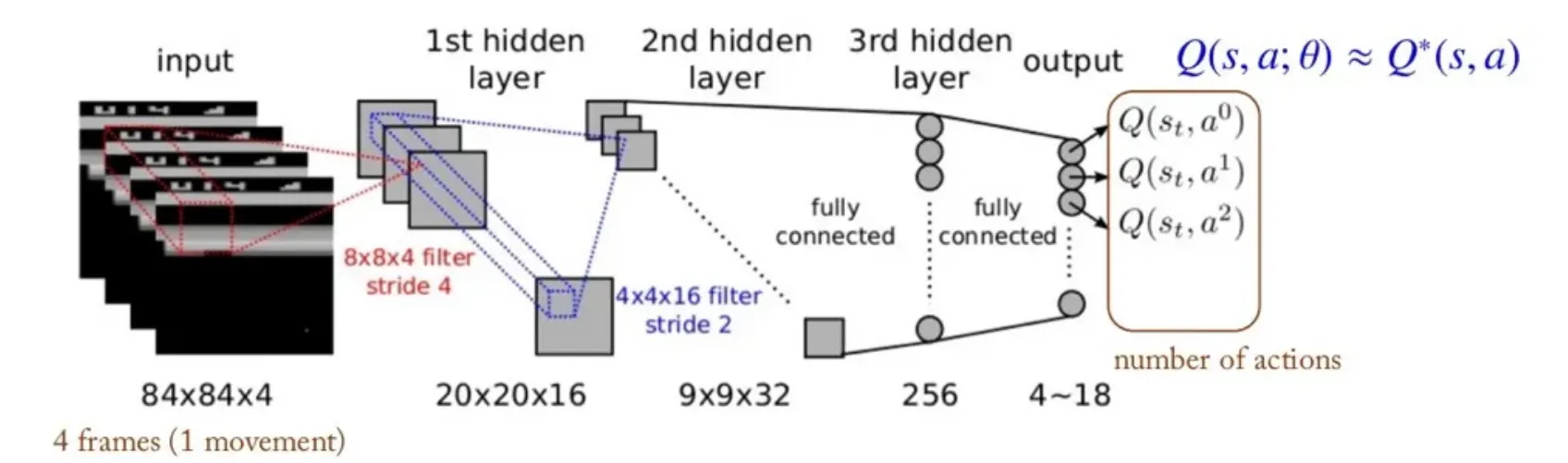
- 는 위와 같이 정의하였다.
🔷 IQN의 pseudo code
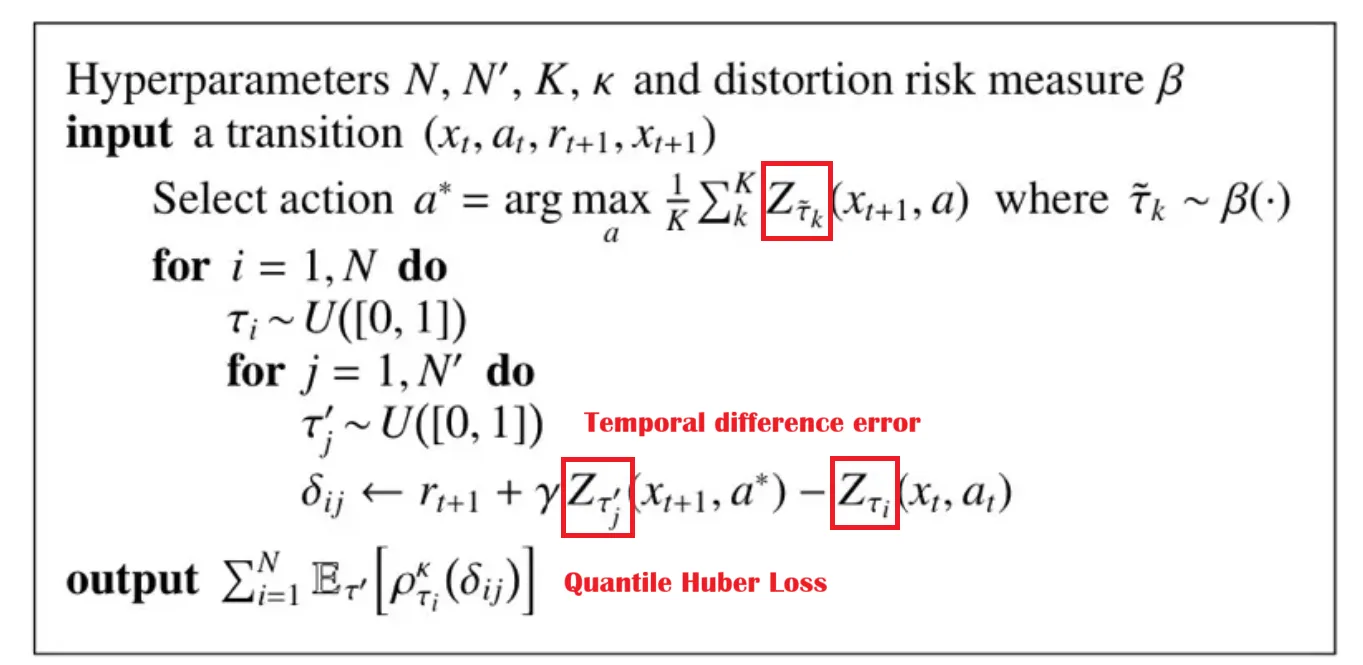
- Random return을 사용할 때, quantile을 위한 sampling의 개수를 모두 다르게 설계할 것을 확인할 수 있다.
- Distortion risk measure 는 greedy policy를 수행할 때만 사용한다.
5️⃣ 정리
🔷 34강에서 배운 내용은 아래와 같다.
- IQN은 학습하는 분포를 변형하여 학습하는 분포의 risk 정도를 조정한다.
- 기존 모델과 달리 Quantile value를 입력으로 받는다.

I'm curious about AI