역행렬 (Inverse Matrix)
항등 행렬 (Identity Matrix)
-
선형 변환의 결과가 변함없는 행렬
-
두 표준 기저벡터 의 값이 동일하게 유지되는 선형변환을 의미
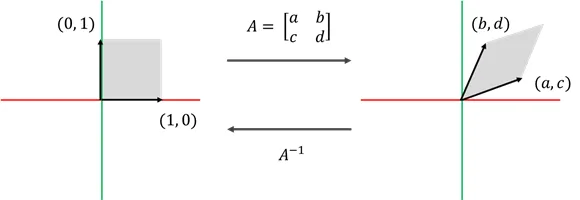
역행렬이란?
-
선형 변환된 결과를 거꾸로 돌려부는 선형 변환
-
이를 합성한 결과는 항등 변환
역행렬의 계산 방법
행렬식 (Determinant)
- 아래 연립방정식의 해는 존재?
-
위 연립방정식의 행렬식은 이 나오고 이는 해가 없음을 의미
- 어째서인가?
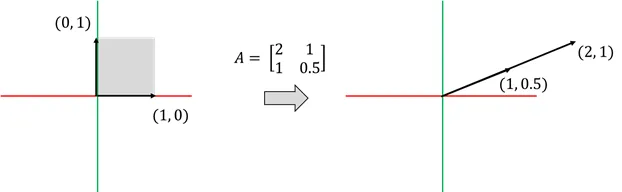
- 위 식을 행렬로 나타내면 다음과 같음
-
위 변환을 분석하면 표준기저벡터 는 각각 로 변환되었는데 이 둘은 같은 기울기를 가지고 있음
-
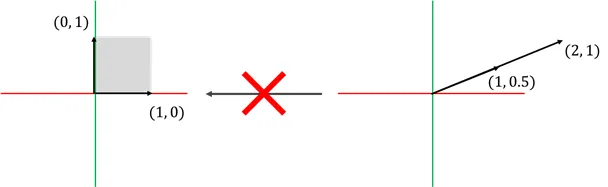
따라서 두 기저 벡터가 선형 독립에서 선형 의존 관계가 됨
- 위의 경우 선형 변환의 결과로 2차원 평면이 1차원 직선으로 소멸되었기에 1차원에서 2차원으로 돌아가는 역행렬은 존재하지 않음
-
그렇다면 가 0 일 때 차원이 소멸 되는 것인가?
-
두 벡터가 만드는 평행 사변형의 넓이는
-
전체 사각형에서 남은 부피를 빼면 넓이 값은 임
-
따라서 해당 넓이가 0 이라면 두 벡터가 동일한 기울기로 겹쳐 있게 됨
-
이는 선형 의존임을 의미
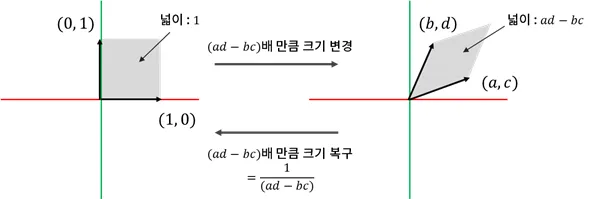
- 만약 역행렬이 존재한다면?
- 다음과 같은 변환을 생각하면 평면이 행렬식 값만큼 달라짐
- 원상 복구 하기 위해서는 달라진 크기의 역수만큼 변해야 함
역행렬의 활용
- 연립방적식의 해를 구할 때 유용하게 사용
- 아래 식에서 선형 변환 와 변환된 벡터 만 알고 있는 경우 의 역행렬을 구할 수 있다면 양변에 곱해 변환하기 전의 벡터 를 구할 수 있음
-
임의의 정방행렬의 역행렬을 구하기 위한 방법은 여러가지가 있는데 대표적으로 다음의 방법들이 존재
- 가우스 소거법 ( Gaussian elimination )
- 크라메르 공식 ( Cramer's rule)
-
하지만 우리가 사용하는 대표적인 선형 변환들은 위의 방법을 사용하지 않고 직관적으로 역행렬을 구하는 것이 가능
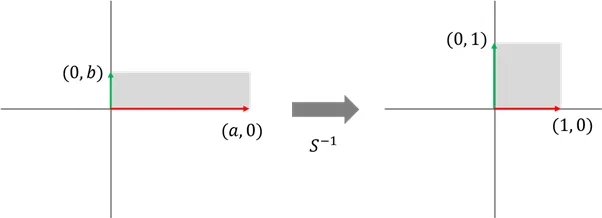
크기 행렬의 역행렬
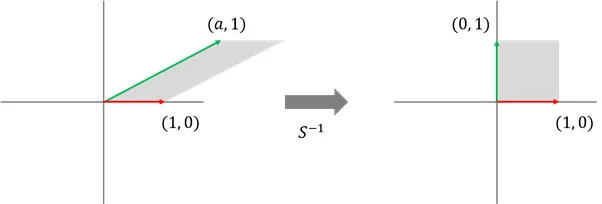
밀기 행렬의 역행렬
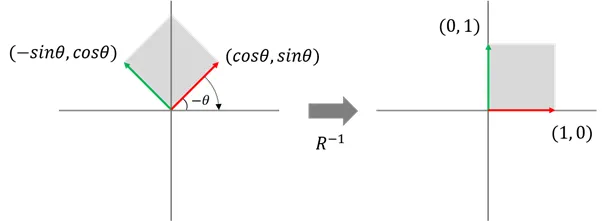
회전 행렬의 역행렬
-
위 결과에서 와 는 서로 전치 관계를 이룸
-
따라서 회전 행렬의 역행렬은 전치 행렬이 됨

상상을 구현하는 개발자