이 게시글은 장형기님의 SLAM 기술면접 질문 100선에 대한 제 나름의 답을 정리한 것입니다.
정의
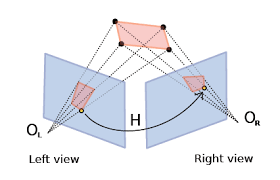
Homography는 두 평면 사이의 Projection 변환 관계를 나타내는 용어입니다.
다시 말해, 한 평면을 다른 평면에 projection했을 때, 두 평면 상의 대응점들 사이에 성립하는 변환 관계를 의미합니다.
이렇게 두 사진 Projection 된 좌표 값 사이의 변환관계를 나타낼 수 있는 matrix H를 homography matrix라고 합니다.
❓ 그럼 어디에 쓰나요?
Homography matrix의 장점은 특정 조건에서 변환 관계를 3D에서 찾을 필요가 없다는 점입니다.
일반적으로 두 이미지의 대응 관계를 구하려면 Epipolar geometry를 사용합니다.
Epipolar geometry는 3D를 활용하는 것이기 때문에 계산 과정이 길고 복잡합니다.
하지만, 장면이 하나의 평면이거나 순수 회전이라면 이 3D 복원 과정을 거칠 필요 없이 바로 2D 2D 매핑이 가능합니다.
즉, 대응점 몇 개만으로 두 이미지의 변환 행렬 를 추정하고, 이를 사용해 전체 점 변환이 가능합니다.
❓ 왜 가능한가요?
Homography matrix는 강력한 Constraint를 통해서 계산하게 됩니다.
-
하나의 3D 평면을 보는경우
- 물체가 하나의 평면 위에 있다고 가정하면, 각 점의 깊이 정보를 몰라도 평면 방정식으로 대체할 수 있습니다.
-
translation없이 순수 회전을 한다
- translation이 없으면 Projection 식에서 깊이 Z가 사라져, 장면 전체의 모든 점이 깊이에 관계없이 동일한 2D 변환을 갖게 됩니다.
둘 중의 한 constraint는 만족해야 사용할 수 있습니다.
한 벽면을 보고 있으면 우리가 보는 물체가 하나의 평면 위에 붙어 있다는 것을 알기 때문에 우리가 움직이더라도 저 물체 point 사이의 관계를 알고 있어서 계산하기가 편해집니다.
같은 이유로 내가 순수하게 회전만 한다면 모든 점들이 동일한 projection 변환을 가지기 때문에 우리는 이 constraint를 활용하여 homography matrix를 만들 수 있습니다.
❓ 어떻게 하나요?
-
일반적인 카메라 투영식
카메라는 3D점 (X,Y,Z)를 내부 파라미터 K와 외부 파라미터 를 이용해 2D 이미지 좌표 로 변환합니다.
(s는 스케일 인자입니다.)
-
두 시점의 카메라 포즈
같은 3D 점을 두 카메라가 본다면 이렇게 나타낼 수 있습니다.
첫 번째 카메라:
두 번째 카메라:
-
첫번째 카메라에서의 3D 점 표현
첫번째 카메라의 이미지 좌표 을 reprojection하여 3D 점을 만들면 이렇게 됩니다.
-
두번째 카메라 투영식에 대입
이렇게 구한 3D 점을 두번째 카메라에 투영하면 아래 식처럼 나옵니다.
이렇게 구한 식에는 Z값이 들어있기 때문에 각기 다른 Z값을 가지고 있다면 다른 변환 관계를 갖게 됩니다.
-
평면 제약 적용
만약 모든 점이 하나의 평면 위에 있다면, 깊이 를 평면 방정식으로 표현할 수 있습니다.평면 방정식:
대입 후:
-
Homgraphy 유도
Z를 두번째 카메라 좌표 투영식에 대입을 한 후 분자만 정리하게 되면 (어차피 분모는 scale factor로 처리)
이런 식이 나오게 됩니다. 그러면 에 어떤 행렬을 곱하여 를 구하게 되고 이것을 Homography matrix라고 합니다. -
최종 형태
❓ 순수 회전은요??
순수 회전은 이제 4번 식의 T가 사라집니다.
그렇다면 Z는 그냥 scale factor처럼 사용되게 되어 무시하고 계산하면 됩니다!
이러한 형태로 나오게 됩니다.
