참고 자료
PinkWink님의 ROS 카메라 캘리브레이션 수행하기 포스트
ROS Wiki에서의 How to Calibrate a Monocular Camera
방법
PinkWink님의 자료만 참고해도 충분합니다.
다만, 카메라를 사용하는 방법은 해당 포스트에는 없기 때문에, 다음의 포스팅을 사용하시면 됩니다.
ROS usb cam 2개이상의 카메라에서 사용하기
결과
[image]
width #이미지 너비(픽셀 수)
640
height #이미지 높이(픽셀 수)
480
[narrow_stereo] #monocular camera로 캘리브레이션을 했는데, 카메라 이름에 streo가 포함되서 이유를 알고 싶어진다.
camera matrix #카메라의 이미지에 대한 정보이다. 3x3 행렬로 이루어졌다.
#이 행렬이 앞으로, 2차원 이미지를 3차원으로 변환할 때 필요한 행렬이다.
646.704789 0.000000 309.524761
0.000000 646.809457 225.359166
0.000000 0.000000 1.000000
distortion #왜곡 계수
0.004350 -0.049532 0.002752 -0.000092 0.000000
rectification #정류 행렬(rectification)
1.000000 0.000000 0.000000
0.000000 1.000000 0.000000
0.000000 0.000000 1.000000
projection #투영 행렬
645.670288 0.000000 309.368818 0.000000
0.000000 646.799561 226.056659 0.000000
0.000000 0.000000 1.000000 0.000000
동기
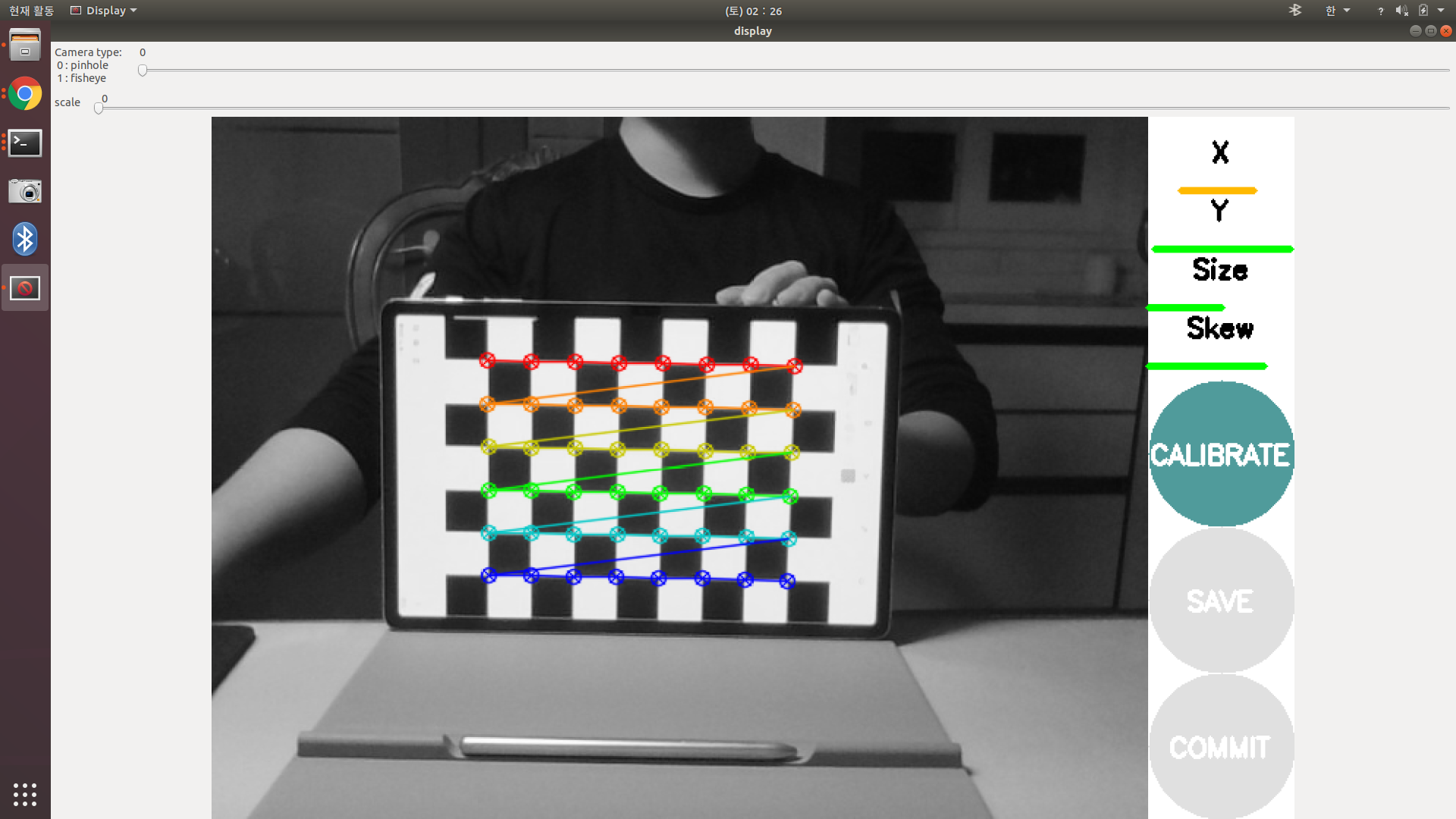
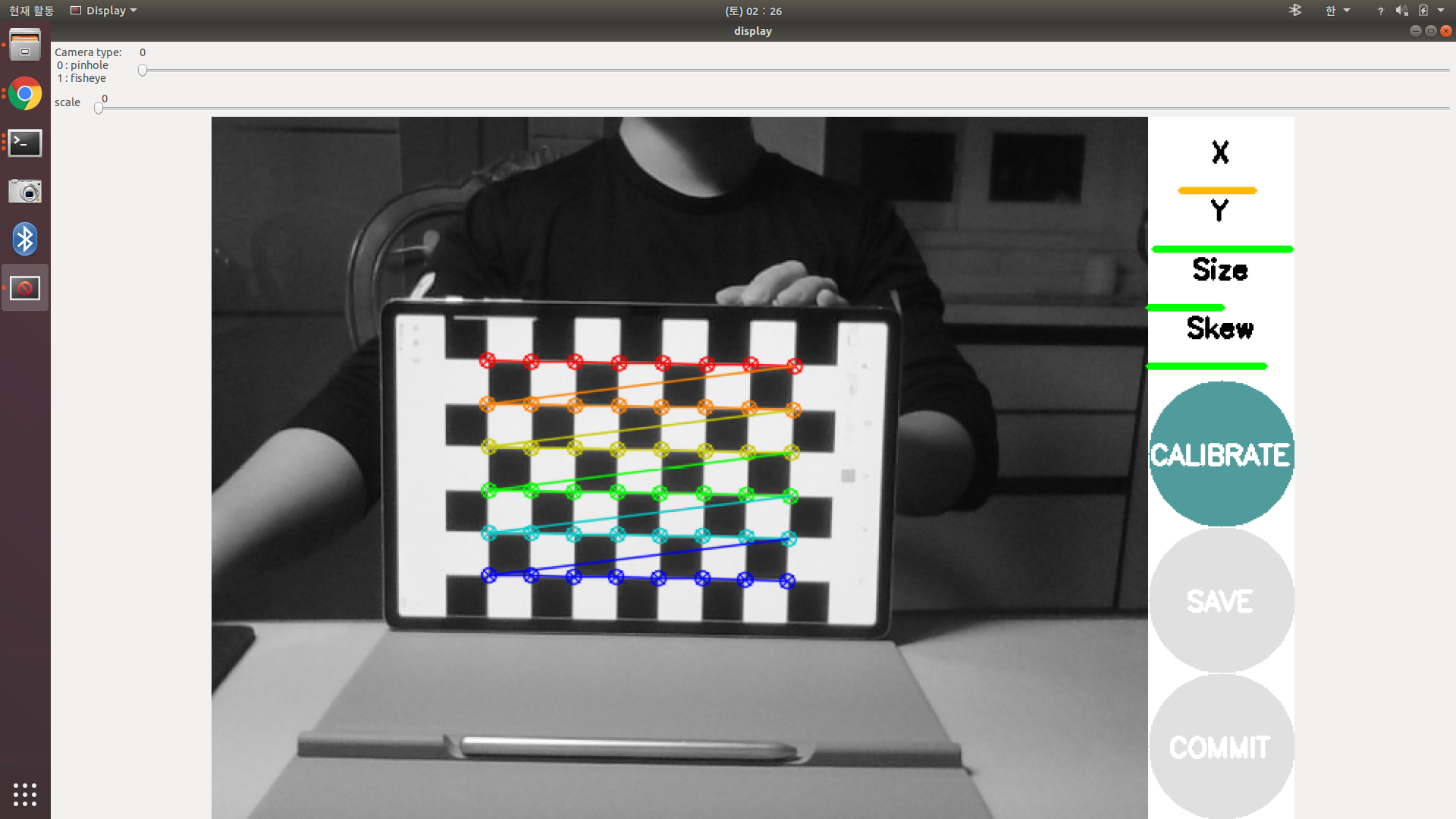
학부연구생 진행 중에, 카메라로 받은 정보와 라이다로 받은 정보를 센서 퓨징을 해야 하는 것을 알게 됐다.
그에 앞서, 우선은 로봇이 카메라로 받은 이미지의 2차원 정보를 통해서 3차원 좌표로 변환하는 Camera calibration을 해야한다는 것을 알게 됐다.
연구실에서 더 제대로 하겠지만, 우선은 노트북 카메라로 수행했다.
그리고 프린팅된 체커보드는 사용하지 않고, 태블릿 PC에 체커보드를 이미지로 띄워서, 수행했다.
우선 실습만 하고 싶어서 급한대로 집에서 태블릿 PC를 이용하게 됐다.

LinkedIn: https://www.linkedin.com/in/junhyuk-kwon-8578b5247/ (1촌 환영해요) (블로그 글은 나중에 시간되면 회고 쓰는걸로....)