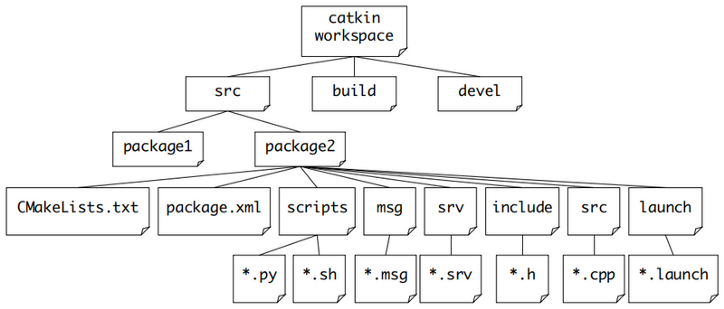
workspace
ROS는 workspace라는 최상위 폴더가 있다.(파일명은 xx_ws와 같이 적는다.)
src
그 workspace에 들어가서 src라는 폴더를 추가해준다.(파일명은 src라고 적는다.)
이제 src에 사용할 각종 폴더들을 추가해준다.(보통은 많은 것들을 패키지 단위로 묶어서 추가해준다.)
catkin_make
패키지를 단순히 추가했다고 빌드가 되지 않는다.
ROS에서 이해가능한 언어로 바꿔준다.
그것이 바로 'catkin_make'다. (catkin_make라는 명령어를 사용하지 않아서 오류가 나는 경우가 종종 있다.)
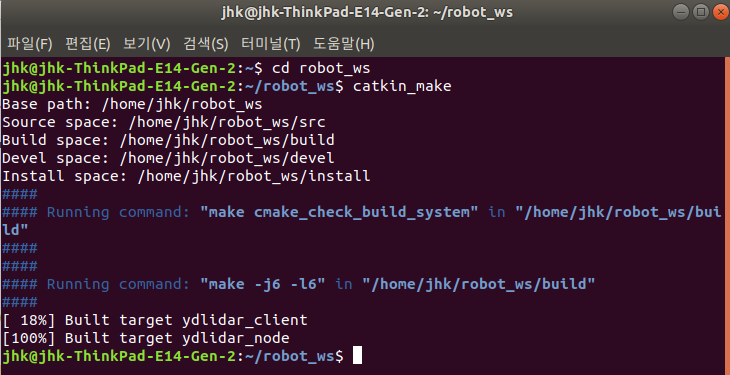
두번째 줄에 catkin_make를 한 것을 볼 수 있다.
build 파일과 devel파일
catkin_make를 하면, workspace에 기존에 있던 src뿐만 아니라, 그 src파일로 만든 build파일과 devel파일이 생성된다.
build파일과 devel파일은 웬만하면 건들지 말고, src파일 안에서 여러 가지 수정을 해야한다.

LinkedIn: https://www.linkedin.com/in/junhyuk-kwon-8578b5247/ (1촌 환영해요) (블로그 글은 나중에 시간되면 회고 쓰는걸로....)