이번 포스트에서는 이전 포스트에서 설치한 시뮬레이션 환경(NAV2, Gazebo)과 동작을 위한 툴(Rviz)을 실행하는 과정을 설명합니다.
Gazebo 실행하기
- 빈 Terminal에서 Gazebo 실행
cd ~/Documents/simulation_ws
source install/setup.bash
export TURTLEBOT3_MODEL=waffle && export WAREHOUSE_MODEL=small_warehouse
ros2 launch aws_robomaker_small_warehouse_world turtlebot3_in_aws_warehouse.launch.pyNAV2 실행하기
- 다른 Terminal 실행 후 NAV2 실행
cd ~/Documents/simulation_ws
source install/setup.bash
ros2 launch nav2_bringup bringup_launch.py use_sim_time:=True autostart:=False map:={맵 경로}/{맵 이름}.yamlRviz 실행하기
- 다른 Terminal 실행 후 Rviz 실행
cd ~/Documents/simulation_ws
source install/setup.bash
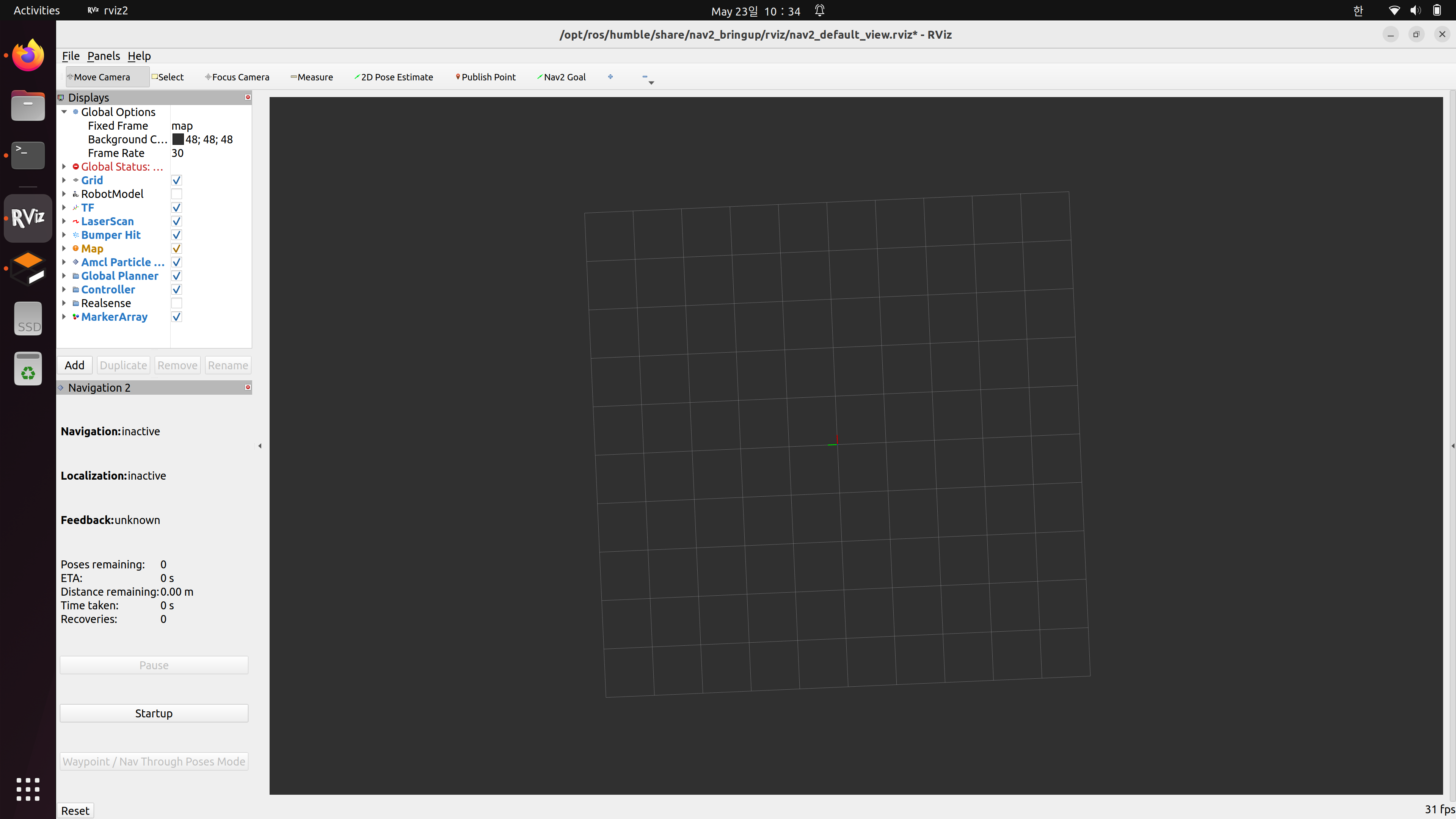
ros2 run rviz2 rviz2 -d $(ros2 pkg prefix nav2_bringup)/share/nav2_bringup/rviz/nav2_default_view.rviz- 화면 좌측 아래에 Startup 클릭
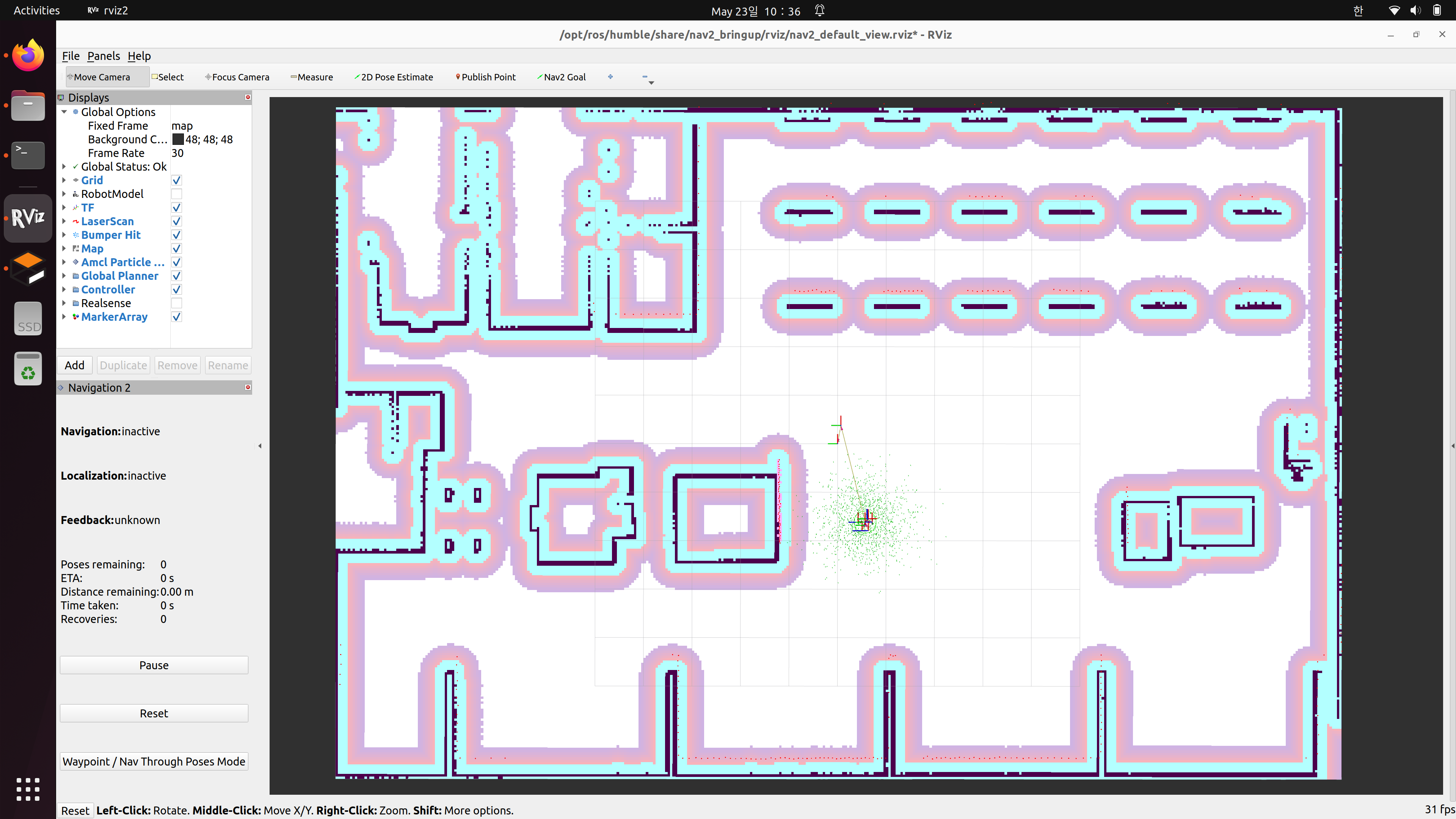
- 2D Pose Estimate 버튼을 누른 후 로봇이 있을 것으로 추정되는 위치를 클릭 및 드래그 수행
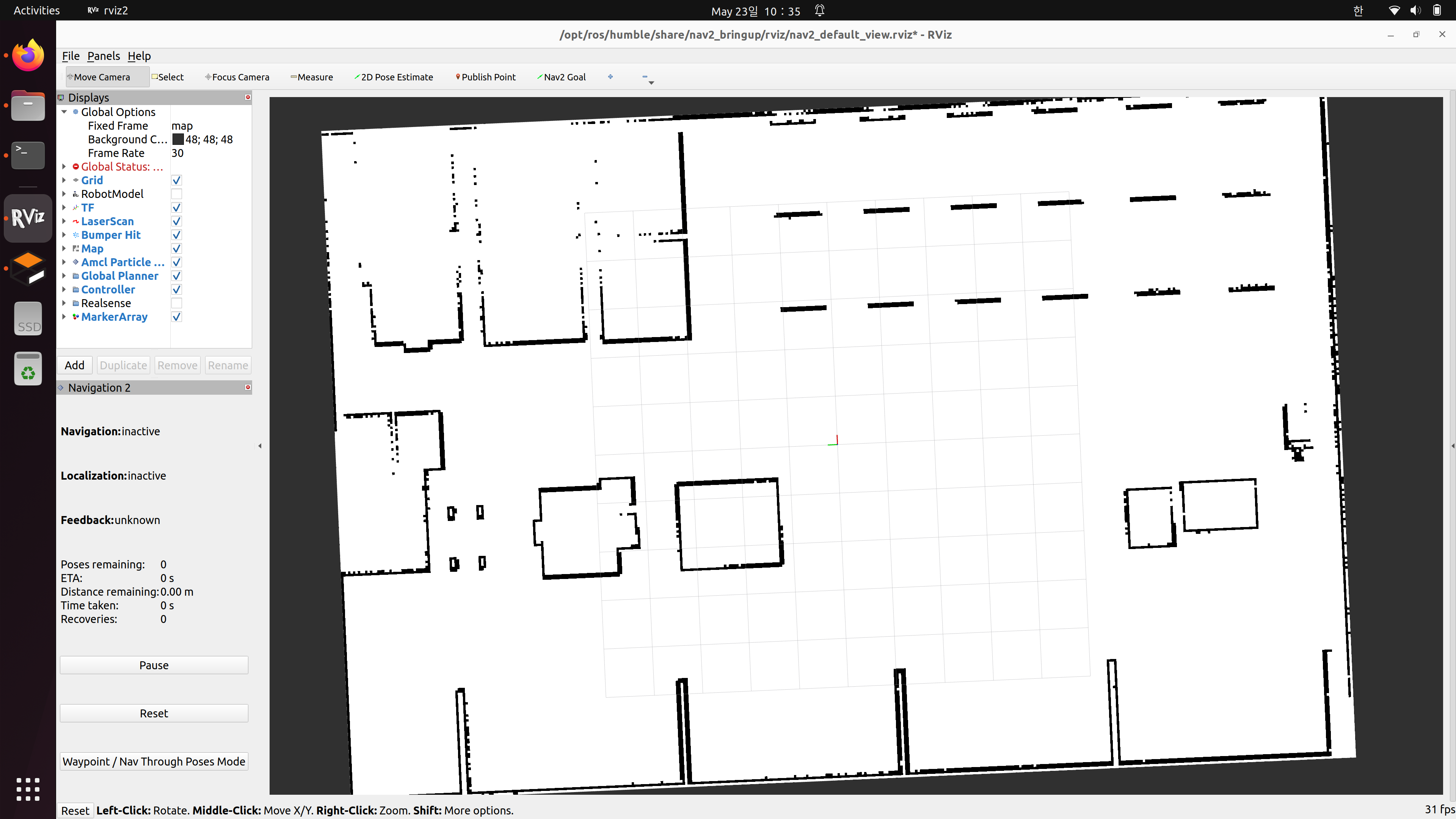
- 맵에 cost가 적용된다면 성공
- Nav2 Goal 버튼을 누른 후 원하는 목적지 위치를 클릭 및 드래그 수행
- 동작 확인
지금까지 NAV2를 실행하는 방법을 설명했습니다.
다음 포스트에서는 Global Path를 생성하는 Planner 및 Local Path를 생성하는 Controller 설정 방법에 대해 알아보겠습니다.

더 나은 결과물을 위한 작은 공간
엉엉... 더 보고 싶습니다..