NAV2 Simulation
1.ROS2 & NAV2

NAV2
2023년 6월 4일
2.개발 환경 구축
개발 환경 ROS2 설치 NAV2 설치 Gazebo 설치 AWS Small warehouse 및 Turtlebot3 설치
2023년 6월 4일
3.Map 생성하기
구성한 시뮬레이션 환경에서 실내 자율 주행을 하기위해서는 맵을 생성해야 합니다.맵을 만드는 방법은 여러가지 방법이 있지만 많이 사용되는 두 가지 방법을 소개합니다.NAV2에서 제공하는 SLAM-ToolboxGoogle에서 제공하는 Cartographer상황에 따라서 제
2023년 6월 4일
4.NAV2 실행하기
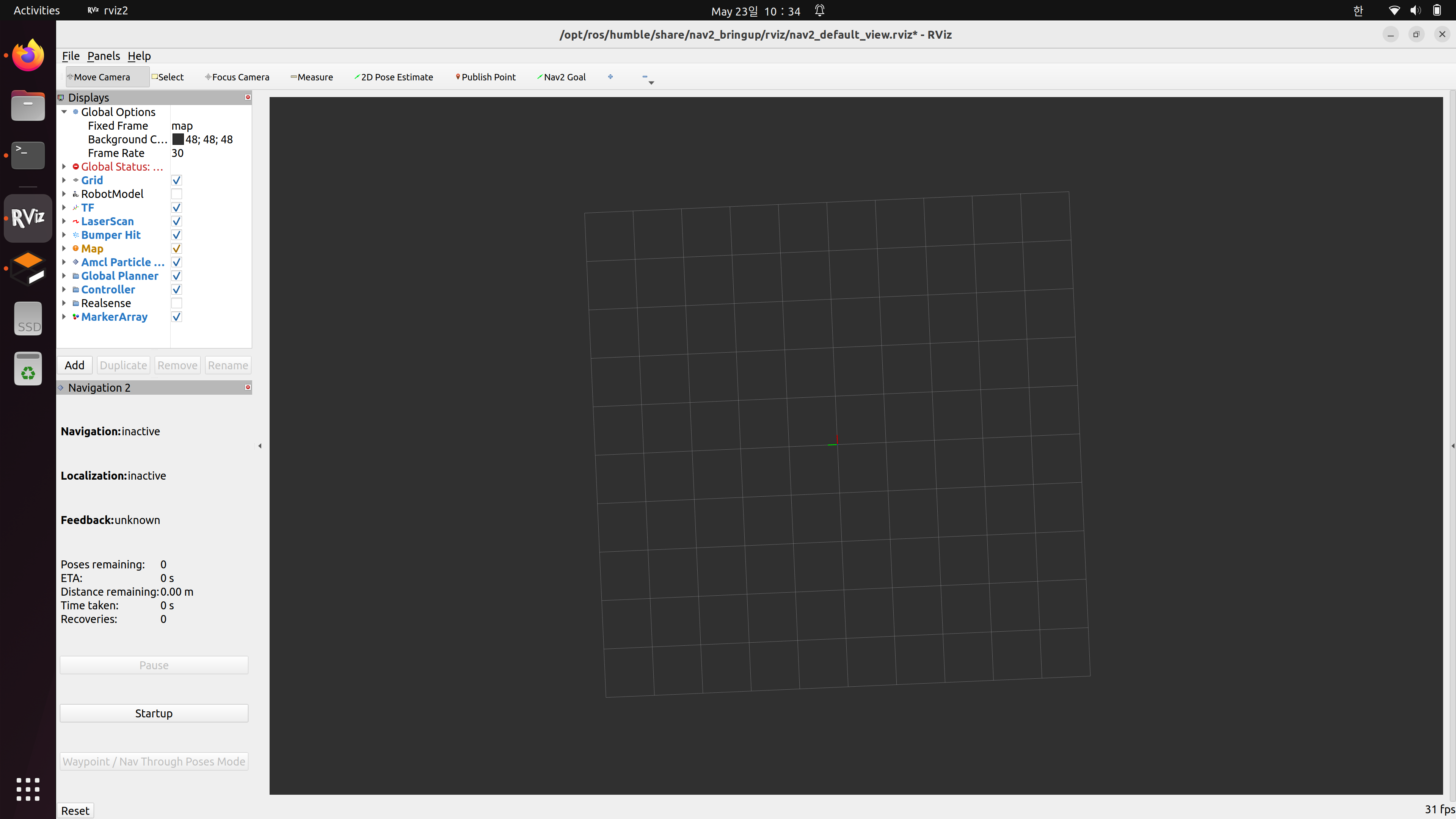
이번 포스트에서는 이전 포스트에서 설치한 시뮬레이션 환경(NAV2, Gazebo)과 동작을 위한 툴(Rviz)을 실행하는 과정을 설명합니다.빈 Terminal에서 Gazebo 실행 다른 Terminal 실행 후 NAV2 실행다른 Terminal 실행 후 Rviz 실행
2023년 6월 4일