ResNet Network 만들기
torchvision.models.resnet
- resnet (18,34,50,101,152)를 만들 수 있도록 되어있음
- 3x224x224 입력을 기준으로 만들도록 되어 있음
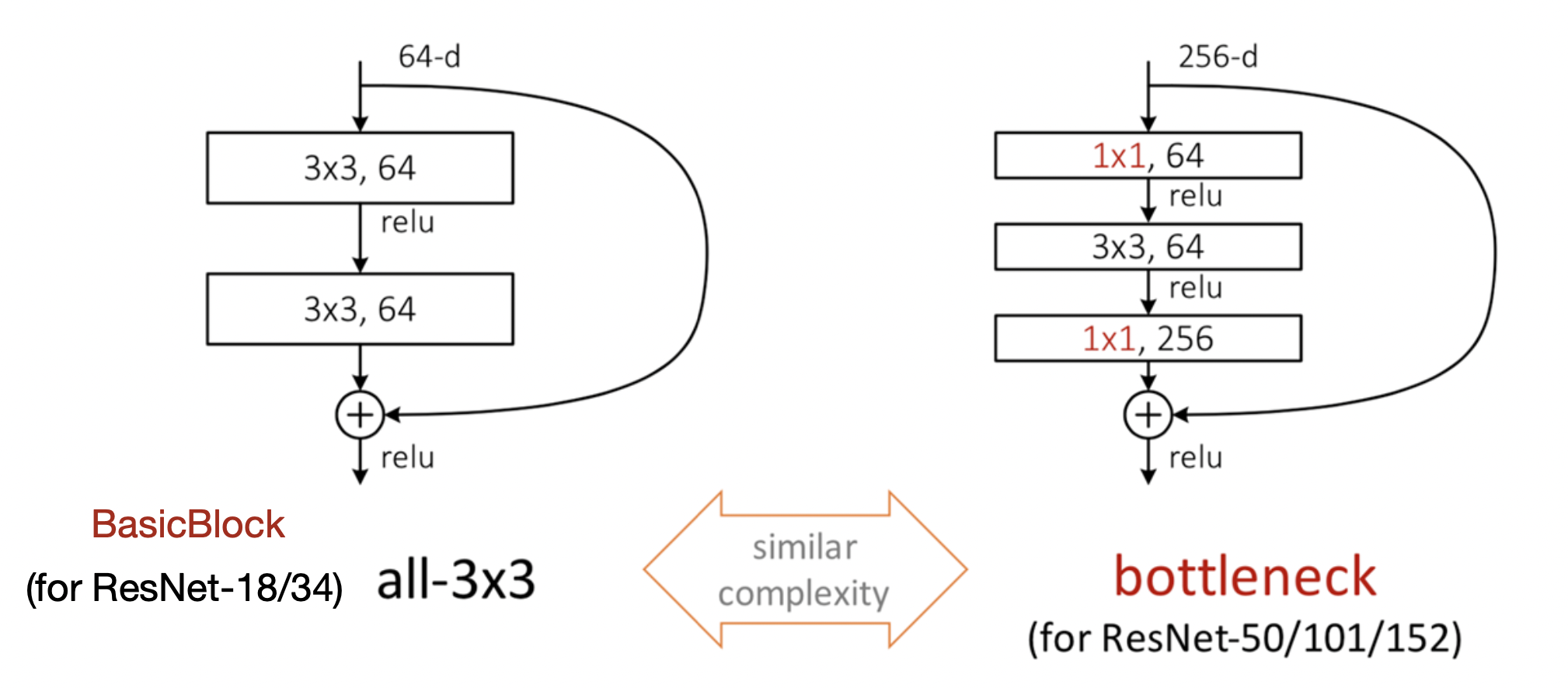
BasicBlock
- downsample을 이용해서 연산이 이뤄질 수 잇도록 사이즈를 맞춰줌
downsample이 없다면 pooling 과 stride로 shpae이 변화할 때 사이즈가 변해 제대로 연산할 수 없게 에러를 출력하게 됨
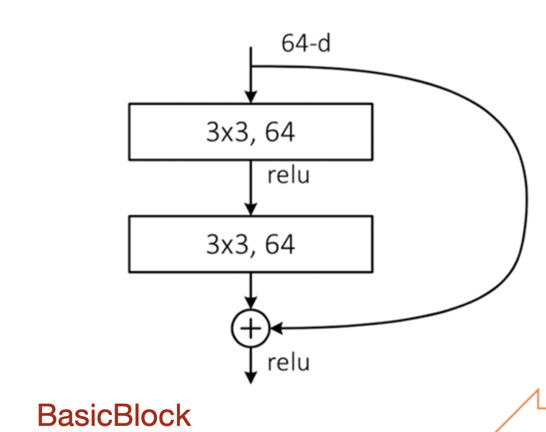
- BasicBlock은 in_channel이 들어오면 오른쪽으로 빠지는 identity가 코드상에 구현되어있고 밑으로 convolution, ReLU 사이에 BatchNorm이 한번있고 다시 ReLU, Conv, BatchNorm 다음에 나와서 identity후에 out, ReLU를 통과시켜 Basic Block이 완성된다.
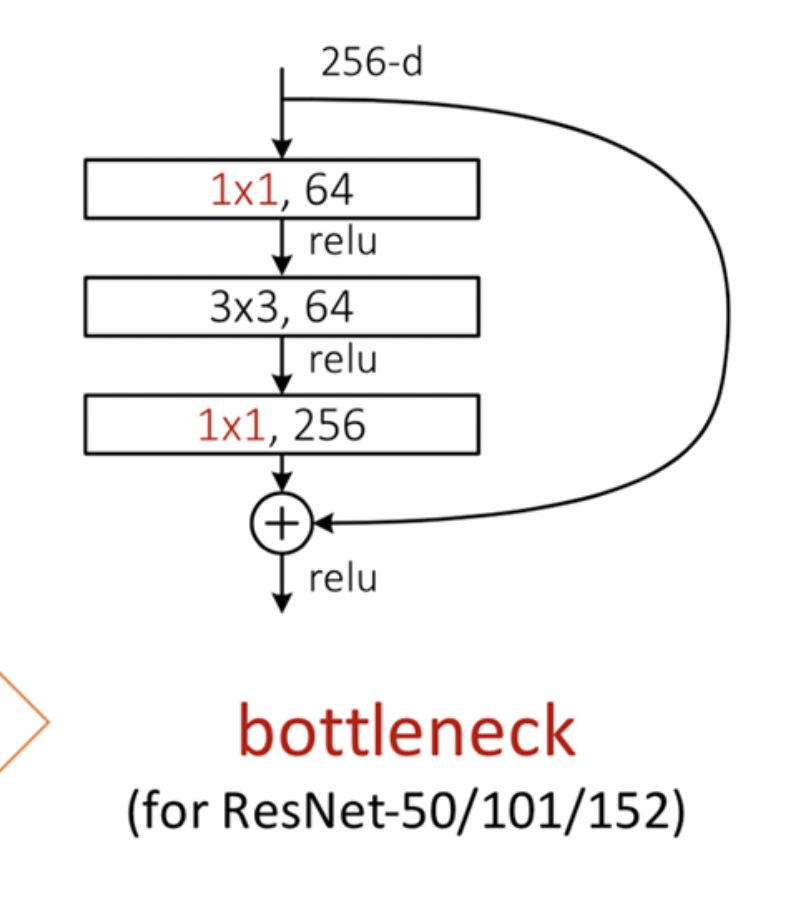
BottleNeck
- downsample을 이용해서 연산이 이뤄질 수 잇도록 사이즈를 맞춰줌
downsample이 없다면 pooling 과 stride로 shpae이 변화할 때 사이즈가 변해 제대로 연산할 수 없게 에러를 출력하게 됨
ResNet 소스코드
import torch.nn as nn
import torch.utils.model_zoo as model_zoo
__all__ = ['ResNet', 'resnet18', 'resnet34', 'resnet50', 'resnet101',
'resnet152']
model_urls = {
'resnet18': 'https://download.pytorch.org/models/resnet18-5c106cde.pth',
'resnet34': 'https://download.pytorch.org/models/resnet34-333f7ec4.pth',
'resnet50': 'https://download.pytorch.org/models/resnet50-19c8e357.pth',
'resnet101': 'https://download.pytorch.org/models/resnet101-5d3b4d8f.pth',
'resnet152': 'https://download.pytorch.org/models/resnet152-b121ed2d.pth',
}
def conv3x3(in_planes, out_planes, stride=1):
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
def conv1x1(in_planes, out_planes, stride=1):
"""1x1 convolution"""
return nn.Conv2d(in_planes, out_planes, kernel_size=1, stride=stride, bias=False)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x) # 3x3 stride = 2
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out) # 3x3 stride = 1
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = conv1x1(inplanes, planes) #conv1x1(64,64)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = conv3x3(planes, planes, stride)#conv3x3(64,64)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = conv1x1(planes, planes * self.expansion) #conv1x1(64,256)
self.bn3 = nn.BatchNorm2d(planes * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x) # 1x1 stride = 1
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out) # 3x3 stride = stride
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out) # 1x1 stride = 1
out = self.bn3(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
class ResNet(nn.Module):
# model = ResNet(Bottleneck, [3, 4, 6, 3], **kwargs) #resnet 50
def __init__(self, block, layers, num_classes=1000, zero_init_residual=False):
super(ResNet, self).__init__()
self.inplanes = 64
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0]'''3''')
self.layer2 = self._make_layer(block, 128, layers[1]'''4''', stride=2)
self.layer3 = self._make_layer(block, 256, layers[2]'''6''', stride=2)
self.layer4 = self._make_layer(block, 512, layers[3]'''3''', stride=2)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
# Zero-initialize the last BN in each residual branch,
# so that the residual branch starts with zeros, and each residual block behaves like an identity.
# This improves the model by 0.2~0.3% according to https://arxiv.org/abs/1706.02677
if zero_init_residual:
for m in self.modules():
if isinstance(m, Bottleneck):
nn.init.constant_(m.bn3.weight, 0)
elif isinstance(m, BasicBlock):
nn.init.constant_(m.bn2.weight, 0)
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
conv1x1(self.inplanes, planes * block.expansion, stride), #conv1x1(256, 512, 2)
nn.BatchNorm2d(planes * block.expansion), #batchnrom2d(512)
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion #self.inplanes = 128 * 4
for _ in range(1, blocks):
layers.append(block(self.inplanes, planes)) # * 3
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
def resnet18(pretrained=False, **kwargs):
model = ResNet(BasicBlock, [2, 2, 2, 2], **kwargs) #=> 2*(2+2+2+2) +1(conv1) +1(fc) = 16 +2 =resnet 18
return model
def resnet50(pretrained=False, **kwargs):
model = ResNet(Bottleneck, [3, 4, 6, 3], **kwargs) #=> 3*(3+4+6+3) +(conv1) +1(fc) = 48 +2 = 50
return model
def resnet152(pretrained=False, **kwargs):
model = ResNet(Bottleneck, [3, 8, 36, 3], **kwargs) # 3*(3+8+36+3) +2 = 150+2 = resnet152
return mode
import torchvision.models.resnet as resnet
res = resnet.resnet50()
res
사회적 가치를 실현하는 프로그래머