VGG-Net
- Oxford VGG(Visual Geometry Group) 에서 만든 Network
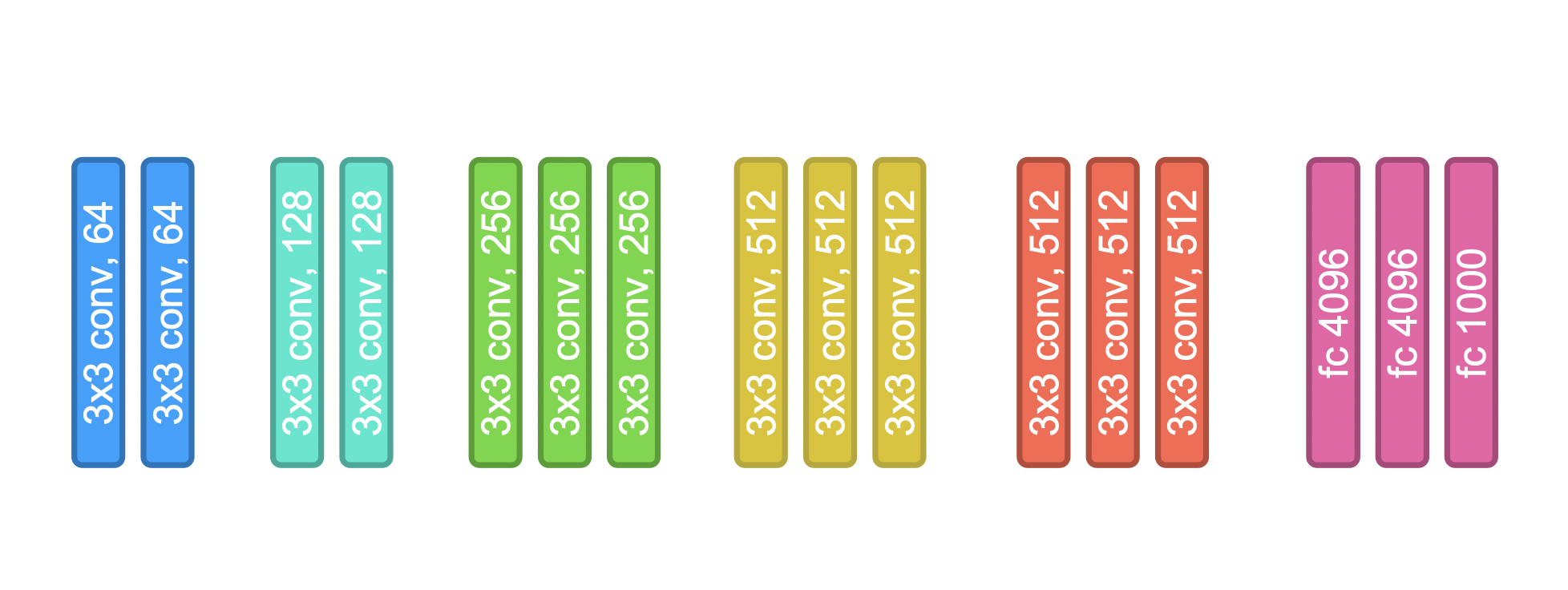
- 전부다 3X3 Convolution, stride =1, padding =1
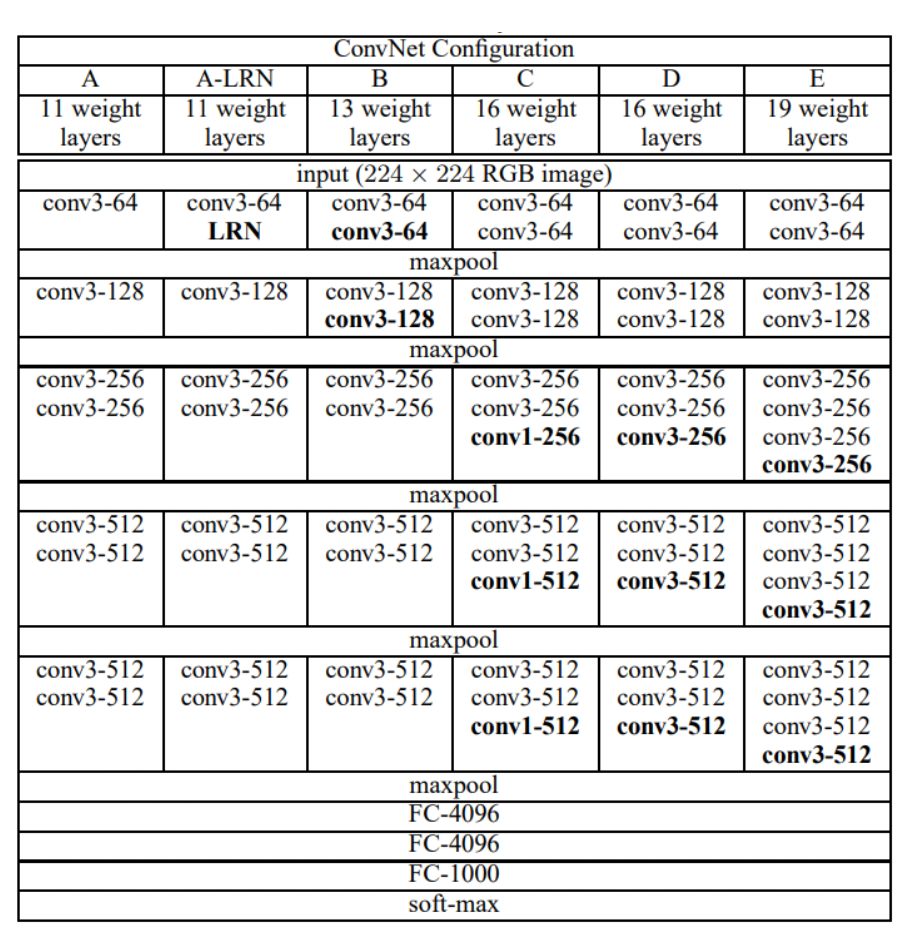
VGG 16
torch.vision.vgg
karming_normalizaion: activation function 초기화를 잘 해주기 위해서 사용- in_channels 에 채널의 값이 변화할 때 해당되는 채널 수를 대입해줘야 함 .
소스코드
import torch.nn as nn
import torch.utils.model_zoo as model_zoo
__all__ = [
'VGG', 'vgg11', 'vgg11_bn', 'vgg13', 'vgg13_bn', 'vgg16', 'vgg16_bn',
'vgg19_bn', 'vgg19',
]
model_urls = {
'vgg11': 'https://download.pytorch.org/models/vgg11-bbd30ac9.pth',
'vgg13': 'https://download.pytorch.org/models/vgg13-c768596a.pth',
'vgg16': 'https://download.pytorch.org/models/vgg16-397923af.pth',
'vgg19': 'https://download.pytorch.org/models/vgg19-dcbb9e9d.pth',
'vgg11_bn': 'https://download.pytorch.org/models/vgg11_bn-6002323d.pth',
'vgg13_bn': 'https://download.pytorch.org/models/vgg13_bn-abd245e5.pth',
'vgg16_bn': 'https://download.pytorch.org/models/vgg16_bn-6c64b313.pth',
'vgg19_bn': 'https://download.pytorch.org/models/vgg19_bn-c79401a0.pth',
}
class VGG(nn.Module):
def __init__(self, features, num_classes=1000, init_weights=True):
super(VGG, self).__init__()
self.features = features #convolution
self.avgpool = nn.AdaptiveAvgPool2d((7, 7))
self.classifier = nn.Sequential(
nn.Linear(512 * 7 * 7, 4096),
nn.ReLU(True),
nn.Dropout(),
nn.Linear(4096, 4096),
nn.ReLU(True),
nn.Dropout(),
nn.Linear(4096, num_classes),
)#FC layer
if init_weights:
self._initialize_weights()
def forward(self, x):
x = self.features(x) #Convolution
x = self.avgpool(x) # avgpool
x = x.view(x.size(0), -1) #
x = self.classifier(x) #FC layer
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.constant_(m.bias, 0)
# 'A': [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M']
def make_layers(cfg, batch_norm=False):
layers = []
in_channels = 3
for v in cfg:
if v == 'M':
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
else:
conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1)
if batch_norm:
layers += [conv2d, nn.BatchNorm2d(v), nn.ReLU(inplace=True)]
else:
layers += [conv2d, nn.ReLU(inplace=True)]
in_channels = v
return nn.Sequential(*layers)
cfg = {
'A': [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'], #8 + 3 =11 == vgg11
'B': [64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'], # 10 + 3 = vgg 13
'D': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'], #13 + 3 = vgg 16
'E': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 256, 'M', 512, 512, 512, 512, 'M', 512, 512, 512, 512, 'M'], # 16 +3 =vgg 19
'custom' : [64,64,64,'M',128,128,128,'M',256,256,256,'M']
}
conv = make_layers(cfg['custom'], batch_norm=True)
CNN = VGG(make_layers(cfg['custom']), num_classes=10, init_weights=True)
CNNVGG CIFAR10
- 소스코드
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
import visdom
vis = visdom.Visdom()
vis.close(env="main")
def loss_tracker(loss_plot, loss_value, num):
'''num, loss_value, are Tensor'''
vis.line(X=num,
Y=loss_value,
win = loss_plot,
update='append'
)
device = 'cuda' if torch.cuda.is_available() else 'cpu'
torch.manual_seed(777)
if device =='cuda':
torch.cuda.manual_seed_all(777)
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
trainset = torchvision.datasets.CIFAR10(root='./cifar10', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=512,
shuffle=True, num_workers=0)
testset = torchvision.datasets.CIFAR10(root='./cifar10', train=False,
download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=4,
shuffle=False, num_workers=0)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
import matplotlib.pyplot as plt
import numpy as np
%matplotlib inline
# functions to show an image
def imshow(img):
img = img / 2 + 0.5 # unnormalize
npimg = img.numpy()
plt.imshow(np.transpose(npimg, (1, 2, 0)))
plt.show()
# get some random training images
dataiter = iter(trainloader)
images, labels = dataiter.next()
vis.images(images/2 + 0.5)
# show images
#imshow(torchvision.utils.make_grid(images))
# print labels
print(' '.join('%5s' % classes[labels[j]] for j in range(4)))
import vgg
#import torchvision.models.vgg as vgg
cfg = [32,32,'M', 64,64,128,128,128,'M',256,256,256,512,512,512,'M'] #13 + 3 =vgg16
class VGG(nn.Module):
def __init__(self, features, num_classes=1000, init_weights=True):
super(VGG, self).__init__()
self.features = features
#self.avgpool = nn.AdaptiveAvgPool2d((7, 7))
self.classifier = nn.Sequential(
nn.Linear(512 * 4 * 4, 4096),
nn.ReLU(True),
nn.Dropout(),
nn.Linear(4096, 4096),
nn.ReLU(True),
nn.Dropout(),
nn.Linear(4096, num_classes),
)
if init_weights:
self._initialize_weights()
def forward(self, x):
x = self.features(x)
#x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.classifier(x)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.constant_(m.bias, 0)
vgg16= VGG(vgg.make_layers(cfg),10,True).to(device)
a=torch.Tensor(1,3,32,32).to(device)
out = vgg16(a)
print(out)
criterion = nn.CrossEntropyLoss().to(device)
optimizer = torch.optim.SGD(vgg16.parameters(), lr = 0.005,momentum=0.9)
lr_sche = optim.lr_scheduler.StepLR(optimizer, step_size=5, gamma=0.9)
loss_plt = vis.line(Y=torch.Tensor(1).zero_(),opts=dict(title='loss_tracker', legend=['loss'], showlegend=True))
print(len(trainloader))
epochs = 50
for epoch in range(epochs): # loop over the dataset multiple times
running_loss = 0.0
lr_sche.step()
for i, data in enumerate(trainloader, 0):
# get the inputs
inputs, labels = data
inputs = inputs.to(device)
labels = labels.to(device)
# zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
outputs = vgg16(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.item()
if i % 30 == 29: # print every 30 mini-batches
loss_tracker(loss_plt, torch.Tensor([running_loss/30]), torch.Tensor([i + epoch*len(trainloader) ]))
print('[%d, %5d] loss: %.3f' %
(epoch + 1, i + 1, running_loss / 30))
running_loss = 0.0
print('Finished Training')
dataiter = iter(testloader)
images, labels = dataiter.next()
# print images
imshow(torchvision.utils.make_grid(images))
print('GroundTruth: ', ' '.join('%5s' % classes[labels[j]] for j in range(4)))
outputs = vgg16(images.to(device))
_, predicted = torch.max(outputs, 1)
print('Predicted: ', ' '.join('%5s' % classes[predicted[j]]
for j in range(4)))
correct = 0
total = 0
with torch.no_grad():
for data in testloader:
images, labels = data
images = images.to(device)
labels = labels.to(device)
outputs = vgg16(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on the 10000 test images: %d %%' % (
100 * correct / total))
사회적 가치를 실현하는 프로그래머