기존에는 console application에 mvp로 개발을 하였다. dll로 만들어서 여러 언어에서 사용할 수 있도록 개발할 예정이다. dll 개발 경험이 있어서 수월하게 만들 수 있었다.
기능
runtime dll의 가장 큰 역할은 npu_driver와의 통신을 래핑 하는 것이다. 즉 IOCTL 명령을 추상화하여 사용하도록 한다. 크게 3가지 기능이 필요할 것 같다.
- init(memory allocate)
- infer (descriptor submit)
- free (memory free)
일단 동작을 하는지 확인하기 위해 만드는 것이므로 범용적이라기보다는 SSD model을 포커싱하여 만들었다.
기능 구현
기존 코드를 거의 복사해서 붙여 넣었다. 헤더의 경우 아래와 같이 선언해 주었다.
// Initialize a runtime instance for the face SSD model.
// model_path_utf8 : UTF-8 path to ssd_mobilenet_v2_face_*.tflite
// anchors_bin_path_utf8 : UTF-8 path to anchors.bin (float32 [num_anchors][4])
// out_handle : on success, receives a non-NULL handle
NPU_API npu_status_t npu_runtime_init_face_ssd(
const char* model_path_utf8,
const char* anchors_bin_path_utf8,
npu_handle_t* out_handle);
// Query model input dimensions (w, h, c). Bytes = w * h * c.
NPU_API npu_status_t npu_runtime_get_input_size(
npu_handle_t h,
uint32_t* out_w,
uint32_t* out_h,
uint32_t* out_c);
// Run one inference.
// image_rgb : RGB uint8 packed, must be exactly w*h*c bytes
// image_byte_len : length of image_rgb (sanity check)
// out_dets : caller-allocated array of `max` entries (may be NULL if max==0)
// max : capacity of out_dets
// out_count : actually written (always <= max)
NPU_API npu_status_t npu_runtime_infer_image(
npu_handle_t h,
const uint8_t* image_rgb,
uint32_t image_byte_len,
npu_detection_t* out_dets,
uint32_t max,
uint32_t* out_count);
// Release all resources held by the handle (chip buffers, device handle, COM).
// Safe to call with NULL.
NPU_API void npu_runtime_free(npu_handle_t h);정의 부분은 복잡하기 때문에 아래 github을 확인하면 된다.
실제 사용
카메라를 사용하여 실시간으로 추론을 테스트하기 위해서 python을 선택했다. opencv를 손쉽게 사용할 수 있고 ctypes를 활용해 손쉽게 dll을 사용할 수 있기 때문이다. 또한 agent의 도움을 받아 빠르게 결과를 확인할 수 있다.
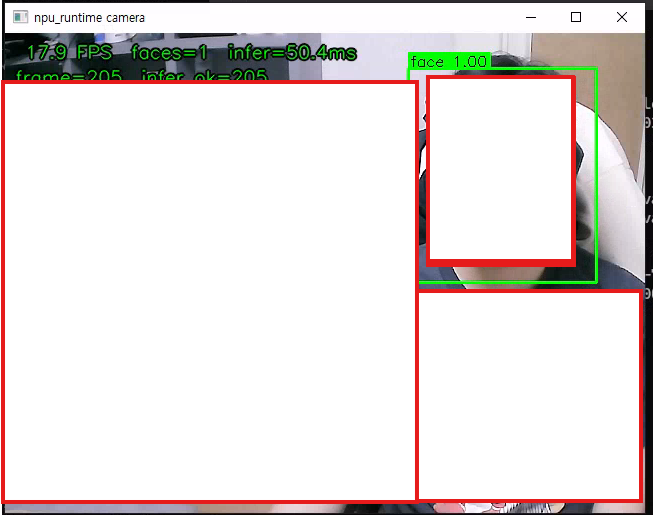
정확히 얼굴을 찾는 것을 확인할 수 있다. 그러나 여기서 문제점이 발생했다. 특정 시점이 되면 추론에 실패하고 driver에서 에러를 뱉었다.
문제 해결
[DIE] infer failed at frame=128 infer_count=127
[DIE] uptime since loop start: 0.98s (last interval)
[DIE] error: infer_image failed (status=6): IOCTL_INFER_NEW failed, GetLastError=483
Traceback (most recent call last):
File "C:\work\real\npu_runtime_camera.py", line 198, in <module>
sys.exit(main())
File "C:\work\real\npu_runtime_camera.py", line 140, in main
dets = npu.infer(rgb, max_dets=50)
File "C:\work\real\npu_runtime_demo.py", line 115, in infer
raise RuntimeError(f"infer_image failed (status={st}): {self.last_error()}")위와 같은 에러 로그가 발생했다. 확인 결과 128프레임에 죽는 현상이 계속해서 발생했다.
한 프레임마다 infer를 하는데 tail이 증가하도록 되어있다. tail에 써주는 csr이 최대 0 ~ 255 까지만 받을 수 있도록 설계되어 있는 것을 확인했다. 코드에
apex_write_register(bar2, APEX_REG_INSTR_QUEUE_TAIL, pDc->DescRingTail);한 번 제출 시, param cache와 infer descriptor를 2개씩 제출하기 때문에 2씩 증가한다. 따라서 pDc->DescRingTail을 % 256 연산을 해야 한다.
apex_write_register(bar2, APEX_REG_INSTR_QUEUE_TAIL, pDc->DescRingTail % 256);위처럼 코드를 변경하니 문제가 발생하지 않았다!!!
결론
npu driver가 잘 동작한다!! 너무 기쁘다.
수정 및 개선해야 할 부분이 많다. anchor 및 quant params 값들을 하드 코딩 형태로 사용하고 있는 점도 수정해야 한다. 또한 byte-identical을 위해서 넣어두었던 로깅 코드들도 제거해야 하고 param cache descriptor도 infer 마다 하기 때문에 최초에 한번 하도록 수정해야 한다.
https://github.com/wangki-kyu/npu_driver/tree/main/npu_runtime
