
import rclpy as rp
from rclpy.node import Node
# 구독할 토픽의 메세지 타입들
from turtlesim.msg import Pose
from geometry_msgs.msg import Twist
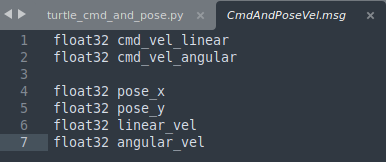
from my_first_package_msgs.msg import CmdAndPoseVel
class CmdAndPose(Node):
def __init__(self):
super().__init__('turtle_cmd_pose')
# (topic_msg 타입, 구독할 토픽명, 실행함수, 주기) 순서
self.sub_pose = self.create_subscription(Pose, "/turtle1/pose", self.callback_pose, 10)
self.sub_cmdvel = self.create_subscription(Twist, "/turtle1/cmd_vel", self.callback_cmd, 10)
self.timer_period = 1.0
# (배포할 msg 타입, msg명, 주기)
self.publisher = self.create_publisher(CmdAndPoseVel, "/cmd_and_pose", 10)
self.timer = self.create_timer(self.timer_period, self.timer_callback)
self.cmd_pose = CmdAndPoseVel()
# 출력할 msg 변수 수정
def callback_pose(self, msg):
self.cmd_pose.pose_x = msg.x
self.cmd_pose.pose_y = msg.y
self.cmd_pose.linear_vel = msg.linear_velocity
self.cmd_pose.angular_vel = msg.angular_velocity
def callback_cmd(self, msg):
self.cmd_pose.cmd_vel_linear = msg.linear.x
self.cmd_pose.cmd_vel_angular = msg.angular.z
def timer_callback(self):
self.publisher.publish(self.cmd_pose)
def main(args=None):
rp.init(args=args)
# class node 설정 및 실행
turtle_cmd_pose_node = CmdAndPose()
rp.spin(turtle_cmd_pose_node)
turtle_cmd_pose_node.destroy_node()
rp.shutdown()
if __name__ == "__main__":
main()
ROS, Python, Cpp 공부 중입니다.