ros
1.ROS 초기세팅 정리용

2.ROS2 사용자 정의 메세지 subscript, publish
3.ROS2 사용자 정의 메세지
https://velog.io/@mcleroysane19/%EC%82%AC%EC%9A%A9%EC%9E%90-%EC%A0%95%EC%9D%98-%EB%A9%94%EC%8B%9C%EC%A7%80-%EC%9D%B8%ED%84%B0%ED%8E%98%EC%9D%B4%E
4.ROS2 - Python(Non-ros)간 Image publish, subscribe
subscriber (ROS2 humble) publisher (Python (Non ROS)) 사용법 에서 패키지 내 subscriber python 파일 작성 내 수정 bash파일 source ros2 통해서 subscriber 실행 publisher 작성 후
5.ROS Oneday - turtlebot Topic 다루기
\-> 이전 Point에 각도로 cos, sin값 구해서 다음
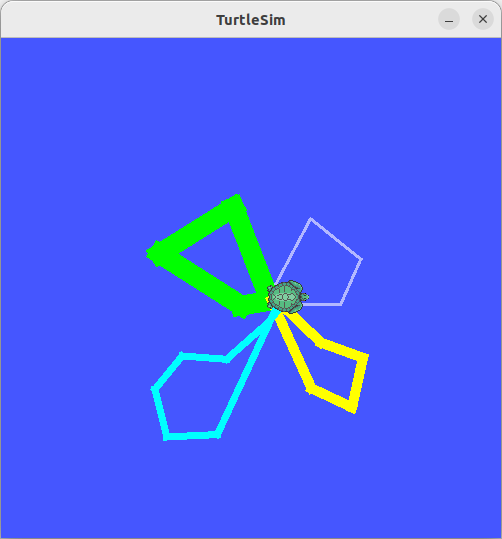
6.ROS2 CPP 삽질 일기 - Turtlesim으로 별그리기
1. ROS2에서는 rclcpp/rclcpp.hpp를 사용한다. > 예제가 ros/ros.h를 사용하는게 많아 이를 참고하여 사용하려 하였지만, ROS2로 넘어오면서 rclcpp로 개발하는 것 같다. 추가로 ros/ros.h와 rclcpp/rclcpp.h의 구동 코드
7.turtlebot3 initial_pose 수정 및 이동
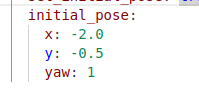
package에서 nav2_params.yamlamcl의 parameter을 다음과 같이 수정이 가능함.근데 이걸 적용시키려면 package를 새로 구축해야하는데 계속 문제가 생겨서 python 파일 내에서 initial_pose를 수정하는 topic을 publish함
8.gazebo CPU 사용 안하는 것에 대한 이야기
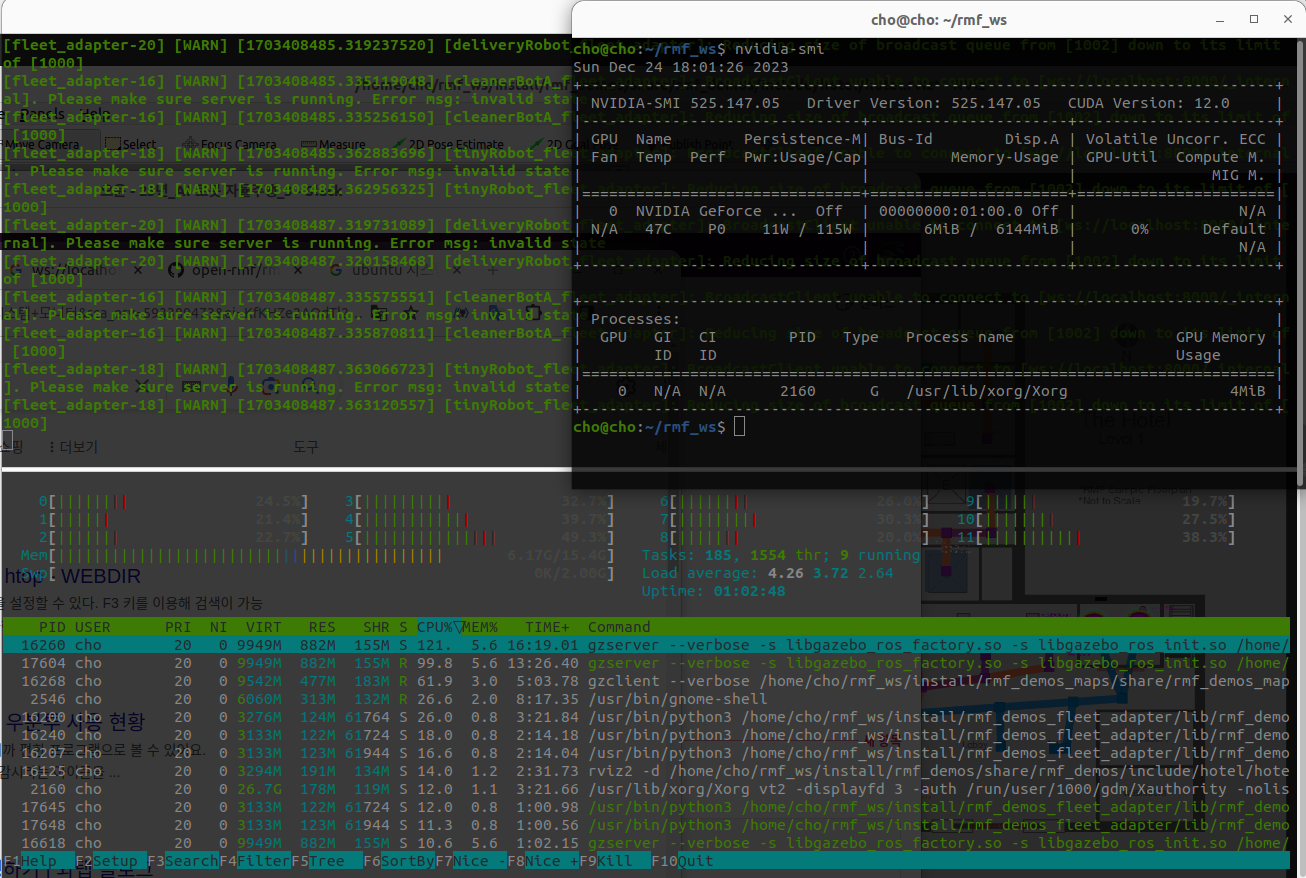
테스트 환경OS : ubuntu 22.04CPU : i7-10750HGPU : RTX 2060RAM : 16GBopen-rmf를 찍먹중인데 맵로드에 10분이 넘게 걸려서 시스템 사용량을 모니터링 해보았다.허...gzserver와 gzclient를 실행하는데 이 부분이