Sensors
1. 센서 패키지
ROS에서 활용 가능한 센서들은 다음과 같이 분류됩니다:
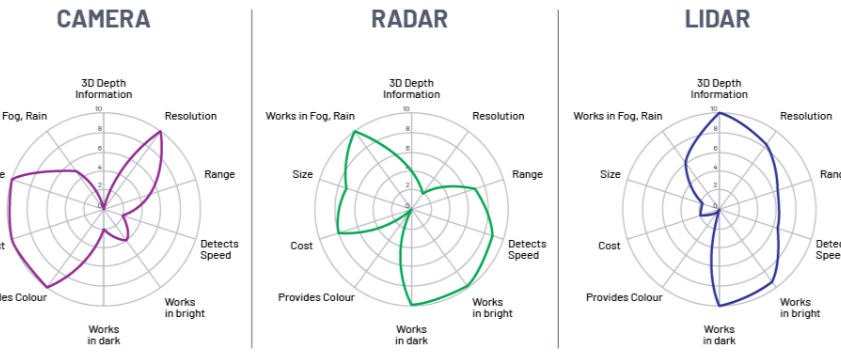
카메라 (Camera)
-
Mono Camera (단안 카메라): 2D 영상만 제공
-
Stereo Camera (스테레오 카메라): 깊이 추정 가능
-
RGB-D Camera: 색상 + 깊이 정보 동시 제공
- Intel RealSense, Microsoft Kinect, ASUS Xtion
| 항목 | 스테레오 카메라 | RGB-D 카메라 |
|---|---|---|
| 거리 측정 원리 | 시차 기반 삼각측량 | 적외선 패턴(구조광) 또는 ToF |
| 빛 사용 여부 | X (패시브) | O (액티브) |
| 텍스처 없는 환경 | 약함 | 강함 |
| 실외 환경 | 강함 | 약함 (태양광에 민감) |
| 연산 복잡도 | 높음 (스테레오 매칭 필요) | 낮음 (센서에서 바로 깊이 제공) |
| 장비 비용 | 낮음 | 높음 |
| 예시 기기 | ZED, T265 | RealSense D435, Azure Kinect |
- 기타: 열화상 카메라, 이벤트 카메라 등
LiDAR (Light Detection And Ranging)
- 1D/2D/3D 레이저 거리 센서
- 예: Velodyne, Ouster, YDLiDAR
IMU (Inertial Measurement Unit)
- 선형 가속도 (x,y,z), 각속도 (x,y,z), 자기장, 자세 추정
GPS
- 절대 위치 좌표 제공
2. 카메라 상세 설명
카메라 구성 요소
- 렌즈 → 이미지 센서 → 아날로그 처리 → 이미지 처리 파이프라인
주요 구분
| 항목 | 설명 |
|---|---|
| 모노 vs 컬러 | 흑백(밝기 정보만) vs 컬러 센서(색상 필터 포함) |
| Global Shutter | 전체 프레임을 동시에 캡처 (움직임 왜곡 없음) |
| Rolling Shutter | 픽셀 라인을 순차적으로 캡처 (왜곡 발생 가능) |
| 해상도 | 픽셀 수, 센서 크기와 관련 있음 |
| 프레임률 (FPS) | 빠른 움직임일수록 높은 FPS 필요 |
3. RGB-D 센서
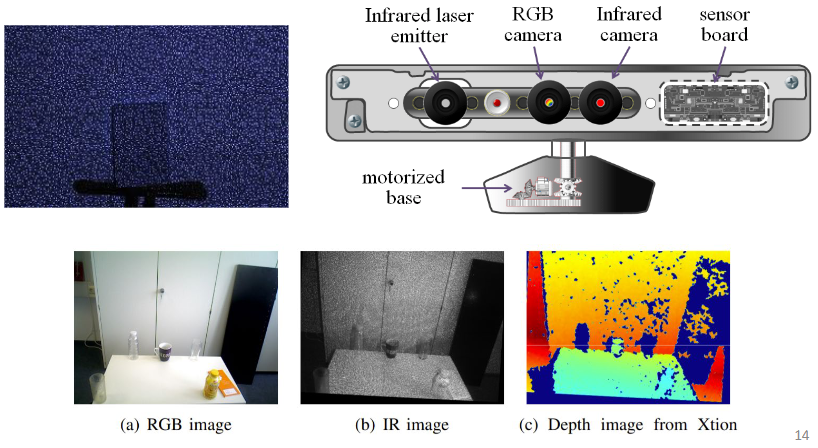
- RGB (이미지) + Depth (거리) 정보 제공
- 대표 제품: RealSense D435i, Azure Kinect 등
- SLAM에서 depth map 기반 정합이 가능
4. LiDAR
- 레이저를 통해 거리 측정
- 2D LiDAR: 주로 모바일 로봇에 장착 (예: Turtlebot)
- 3D LiDAR: 공간 전체의 포인트 클라우드 생성
- Velodyne VLP-16, Ouster 등
Intensity 정보
- 최근 3D LiDAR는 거리 외에 반사 강도도 제공
5. IMU (Inertial Measurement Unit)
- 가속도 및 자이로스코프 기반 센서
- x/y/z 방향의 선형 가속도 + 각속도 측정
- Heading (yaw 방향) 정보 포함
- 주로 Visual-Inertial SLAM에 사용
6. 👀 다양한 센서 구성 예시
| 구성 | 센서 종류 |
|---|---|
| Intel Realsense D435i | RGB-D + IMU |
| Intel Realsense T265 | Stereo + IMU |
| Azure Kinect | 고품질 RGB-D |
| Velodyne VLP-16 | 3D LiDAR |
| YDLiDAR | 2D LiDAR |
| Microstrain 3DM-GX5-25 | 고정밀 IMU |
7. 🌐 센서 융합 개념
- Sensor Fusion: 서로 다른 센서 데이터를 결합하여 정확한 추정
- Fused Sensing: 센서 내부에서 미리 융합된 정보 제공
✅ 요약
| 센서 | 특징 | 예시 |
|---|---|---|
| Mono Camera | 단일 영상 | USB 카메라 |
| Stereo Camera | 거리 추정 가능 | ZED, T265 |
| RGB-D | 색 + 깊이 | D435i, Kinect |
| LiDAR | 정확한 거리 측정 | VLP-16 |
| IMU | 가속도 + 각속도 | 3DM-GX5 |
| GPS | 절대 위치 | GNSS 모듈 |

상어 인형을 좋아하는 사람