Visual SLAM
1.Camera Basics
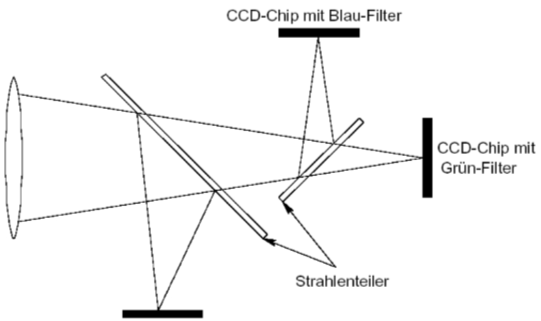
Lens (렌즈): 빛을 한 점으로 모아주는 역할Aperture (조리개): 렌즈 구경을 조절해 빛의 양과 심도(depth of field)를 조절Shutter (셔터): 노출 시간을 제어Sensor (센서 칩): 빛을 전기 신호로 변환하는 광검출기(array of p
2.State Representation
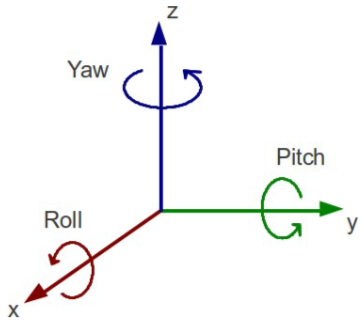
정의: 3×3 직교 행렬로, 벡터를 회전시킬 때 그대로 곱해서 사용 특징: 역행렬이 전치행렬($R^{-1}=R^\\top$) 행렬식이 +1 (손잡이 방향 보존) 합성·분해가 직관적, 로테이션 연산에 직접 적용 가능 정의: 세 축(X, Y, Z) 중 선택한 순서
3.Visual SLAM
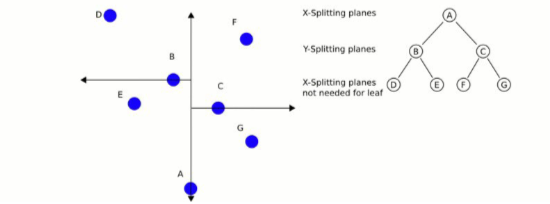
정보 요약: 원본 이미지는 수백만 픽셀로 구성되지만, SLAM에서는 장면 전체를 모두 쓰기보다 “특징점(interest point)”만 뽑아내 맵과 포즈를 추정합니다. 효율성: 중요한 포인트만 추려내기 때문에 연산량이 줄고, 실시간 성능을 확보할 수 있습니다. 정확
4.Bag-of-Words
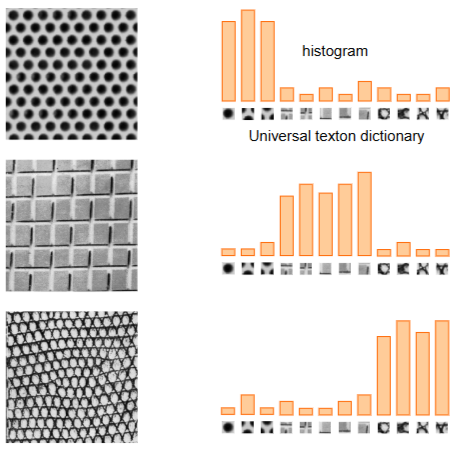
원래는 문서 내 단어 빈도 기반 정보 검색 기법.이를 이미지 분류에 응용한 것이 Bag-of-Features (BoF) 혹은 Bag-of-Visual-Words (BoVW).객체는 지역적 특징들의 모음으로 표현됨 (local features collection).지역
5.Sensors
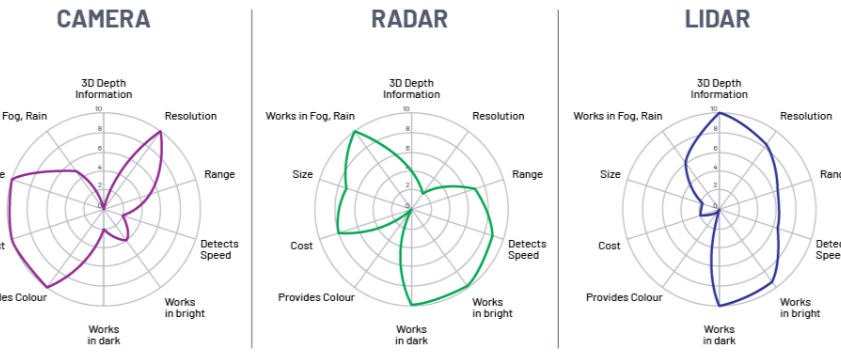
ROS에서 활용 가능한 센서들은 다음과 같이 분류됩니다:Mono Camera (단안 카메라): 2D 영상만 제공Stereo Camera (스테레오 카메라): 깊이 추정 가능RGB-D Camera: 색상 + 깊이 정보 동시 제공Intel RealSense, Microso
6.Visual SLAM 예시 문제 (1)

질문: 2차원 공간에서 회전과 평행이동을 동시에 표현하려면 어떤 크기의 행렬을 사용해야 할까?1) 3×2 2) 2×3 3) 2×2 4) 3×3 4) 3×32) 2×3 행렬 2×3 행렬은 평행이동을 표현할 수는 있으나, 회전·스케일 등의 선형변환을 동차좌표 없이 끼워
7.Visual SLAM 예시 문제 (2)
질문 (한글 번역)저조도 환경에서 카메라를 더 빛에 민감하게 만들기 위해 일반적으로 높이는 설정은 무엇인가?1) 조리개 크기(Aperture)2) 셔터 속도(Shutter speed)3) 화이트 밸런스(White balance)4) ISO 4) ISO1) 조리개 크기
8.Rotation Matrix
회전 행렬은 3차원 공간 상에서 물체나 좌표계를 회전시키기 위해 사용되는 선형 변환 행렬입니다. 주로 로봇공학, 컴퓨터 비전, 그래픽스 등에서 좌표 변환을 수행할 때 자주 사용됩니다.아래는 회전 행렬의 수학적 성질을 정리한 내용입니다.정규 직교 행렬이란 다음 조건을 만
9.Coordinate Representation
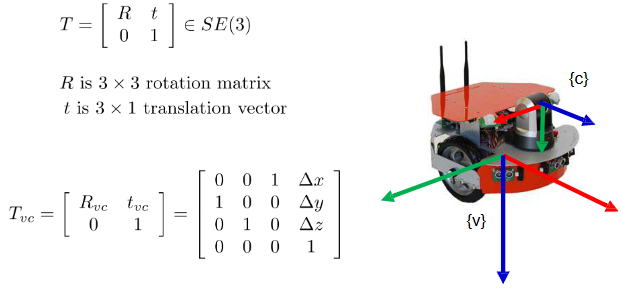
좌표 표현(Coordinate Representation)이란 회전(Rotation)과 이동(Translation)을 결합하여 물체의 자세(Pose)를 표현하는 것입니다.Transformation Matrix $T$는 보통 다음과 같이 구성됩니다:$$T = R\\ |\
10.Direct Linear Transform
DLT (Direct Linear Transform): 3D 세계 좌표를 카메라 이미지로 투영하는 과정을 수학적으로 유도하는 과정.목표: 3D 월드 좌표 (X) 상의 한 점을 이미지 픽셀 좌표 (x)로 변환하는 투영 행렬 $P$의 파라미터를 추정하는 것.이때 $P$는