Rotation Representation
Rotation Matrix
- 정의: 3×3 직교 행렬로, 벡터를 회전시킬 때 그대로 곱해서 사용
- 특징:
- 역행렬이 전치행렬()
- 행렬식이 +1 (손잡이 방향 보존)
- 합성·분해가 직관적, 로테이션 연산에 직접 적용 가능
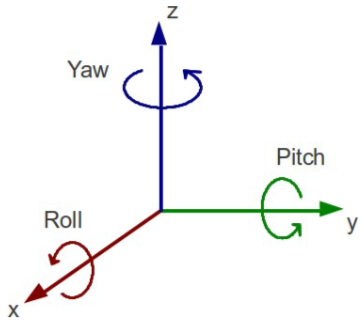
Euler Angles
- 정의: 세 축(X, Y, Z) 중 선택한 순서(예: Z–Y–X)로 연속 회전시킨 각도 세트
- 특징:
- 직관적(롤·피치·요)
- ‘짐벌락(gimbal lock)’이라 불리는 특이점(±90°) 발생 가능
- 축 순서에 따라 표현 결과가 달라짐
Screw Parameters
- 정의:
- “한 축(axis)” 주변으로 “한 각(θ)” 만큼 회전한 것으로 모든 3D 회전을 표현
- 특징:
- Euler 회전 정리를 기초로 함
- 회전 축과 회전 각 두 정보만으로 압축 표현
- 직관적 축·각 조절 가능, 다축 복합 회전 이해에 유리
Quaternion
- 정의: 4원수(스칼라 부호 + 벡터 부호)로 형태
- 특징:
- 짐벌락 없음
- 회전 합성 시 행렬 곱보다 연산량 작음
- 노멀라이즈로 수치 안정성 확보
- 컴퓨터 그래픽·항공우주 등에서 널리 사용
State and Uncertainty
1. 왜 “불확실성”을 다루어야 하나?
- 실제 센서는 완벽하지 않다
- 바퀴 인코더는 미끄러짐이 있고, 카메라는 조명·노이즈 영향을 받는다.
- 단일한 “정답 위치”보다는
- 여러 가능성(“여기일 수도 있고 저기일 수도 있다”)을 함께 고려해야
- 잘못된 추정이 누적되어 전체 맵이 틀어지는 것을 방지할 수 있다.
2. 가우시안 모델
• 상태를 평균과 “오차 타원”으로 표현
- 평균: 가장 그럴듯한 위치·자세
- 타원(공분산): 그 평균 주위로 퍼져 있을 불확실성 영역
- 타원이 좁을수록 “여기가 거의 확실하다”
- 타원이 넓을수록 “아직 위치가 뚜렷하게 정해지지 않았다”
• 예측과 보정 과정
- 예측 단계
- 로봇이 움직이면(휠 구동, 관성 센서 등)
- 이전 위치에서 어느 정도 오차를 더해 “새로운 위치 분포”를 추정
- 보정 단계
- 카메라나 레이저로 관찰한 지형지물과 예측 위치를 비교
- “관찰 결과가 믿을 만한 정도”에 맞춰 평균을 조금 바꾸고,
- 불확실성 타원을 좁혀 나간다.
• 장·단점
- 장점
- 정보(평균+타원)만으로 컴팩트하게 관리
- 칼만 필터 같은 최적 추정 기법 적용 가능
- 단점
- 타원이 하나뿐이므로 “두 개 이상의 가능성”을 표현 못 함
- 본질적으로 ‘매 단계마다 작은 오차 가정’을 필요로 함
3. 샘플 기반(Particle) 모델
• 상태를 여러 개의 가설(입자)로 표현
- 입자 하나하나가 “이 위치일 수도 있다”라는 가설
- 각각의 신뢰도(가중치)를 부여해 다수의 가설 분포로 상태 표현
• 예측과 보정 과정
- 예측: 각 입자를 로봇 운동 모델에 따라 흩뿌리듯 이동
- 가중치 부여: 관찰한 환경 정보와 얼마나 잘 맞느냐에 따라
- 재샘플링: 신뢰 높은 입자는 살리고, 낮은 입자는 버려 더 많은 복제 생성
- 이렇게 하면 “가능성이 높은 영역”에 입자가 모인다
• 장·단점
- 장점
- 복잡한 다중봉우리(multi-modal) 분포를 자유롭게 표현
- 비선형·비정규 분포도 그대로 다룰 수 있음
- 단점
- 수백~수천 개 입자를 관리하느라 계산·메모리 부담 큼
- 입자가 너무 적으면, 실제 가능성 영역을 놓칠 위험 (“샘플 고갈”)
4. SLAM에서 두 접근의 활용
- EKF-SLAM (가우시안 기반)
- 비교적 환경이 단순하거나, 연속적인 작은 움직임 추정에 강함
- 실시간성 요구되는 로봇에 적합
- FastSLAM / Particle-based SLAM
- 지형지물이 복잡하게 흩어져 있거나, 다중 경로 추정이 필요할 때
- “맵에 대한 불확실성”도 입자로 동시에 표현 가능
5. 이론적 핵심 포인트 정리
- 불확실성 없이 SLAM 불가
- 오차 누적 시 전체 맵·위치가 크게 틀어짐
- 가우시안 vs. 샘플
- 연속적 오차 모델 vs. 여러 개의 가설 모델
- 예측–보정 순환
- 로봇 동작 후 “퍼진” 분포 예측 → 센서 관찰로 “조여 주는” 보정
- 실전 팁
- 가우시안 모델은 공분산 타원 시각화로 직관적 이해
- 샘플 모델은 입자 분포를 그림으로 살펴보며 파라미터(입자 수·재샘플링 조건) 조정

상어 인형을 좋아하는 사람