3D Computer Vision Lecture 12 (part2) Generalized Cameras
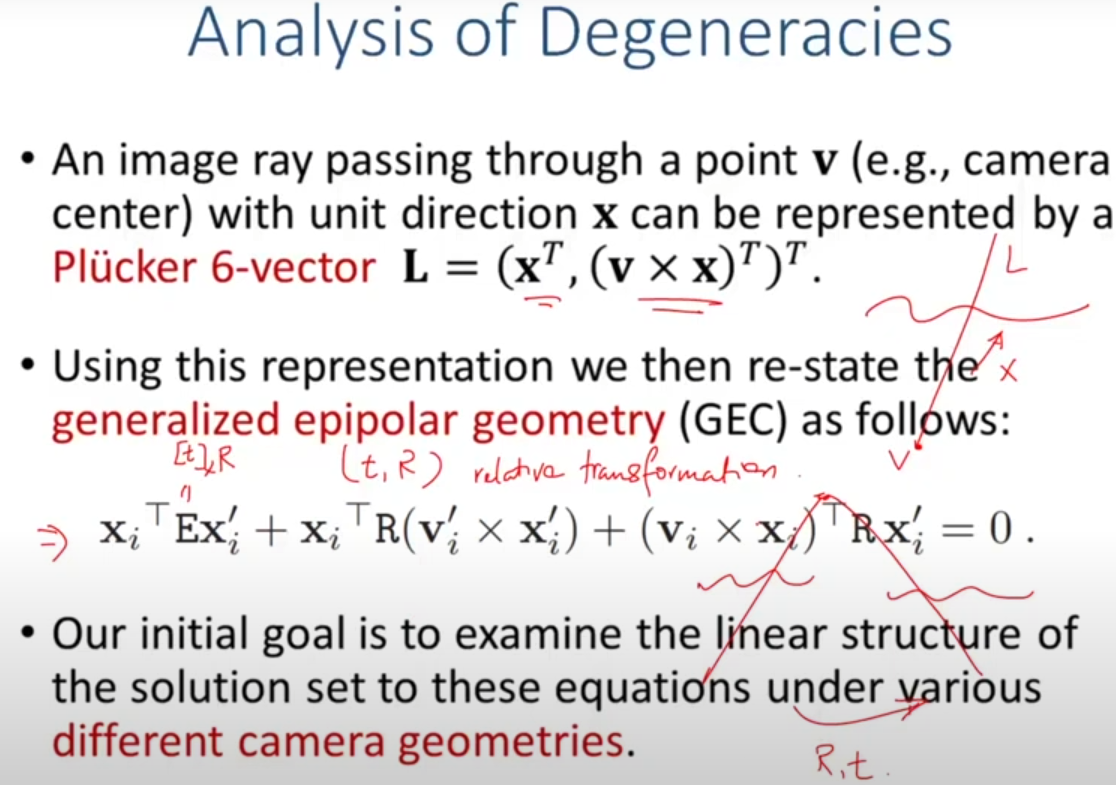
- 점 v를 통과하는 ray를 플루커 6-벡터로 표현하면, 단위방향벡터 x를 가지고 1번쨰 처럼 표현가능
- 이것을 이용하여 generalized epipolar geometry로 나타내면 위와 같다. 이때 E는 t와 R의 cross product, (t,R)은 relative transformation을 나타낸다.
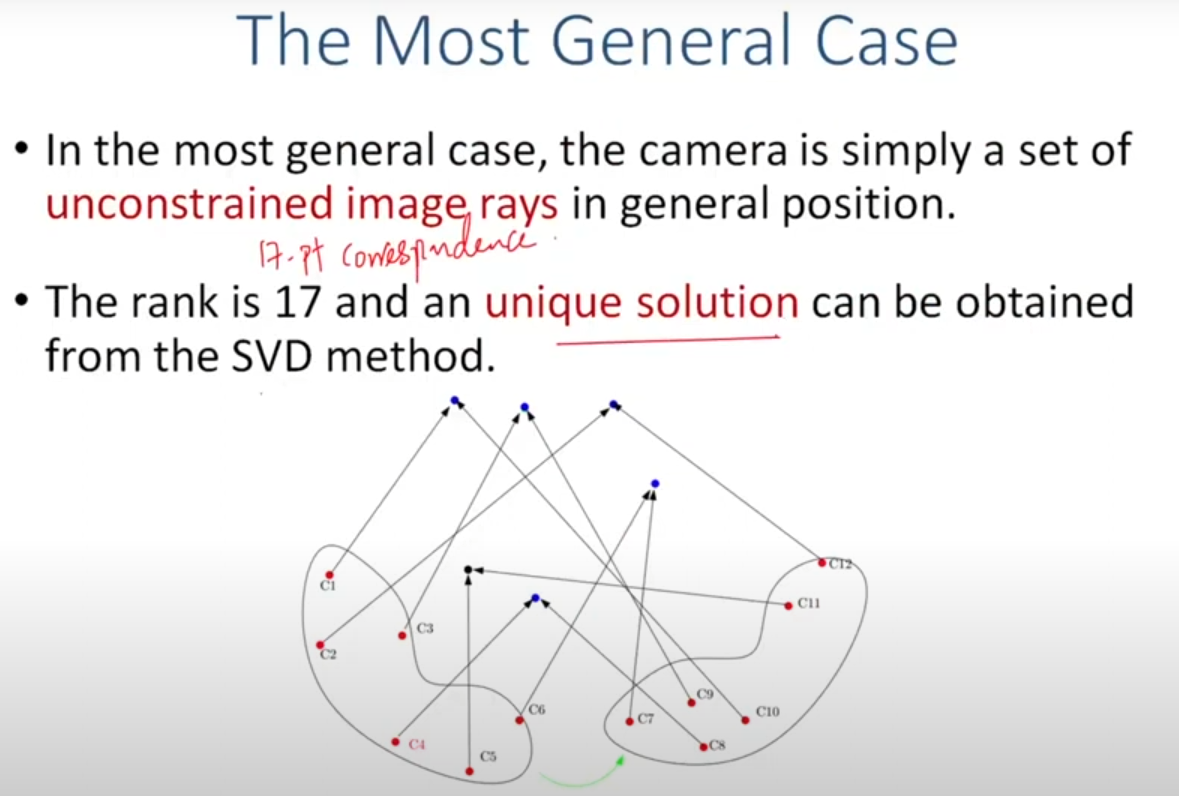
- 일반적으로 임의의 3차원 점은 같은 generalized camera에 의해 track되지 않는다.
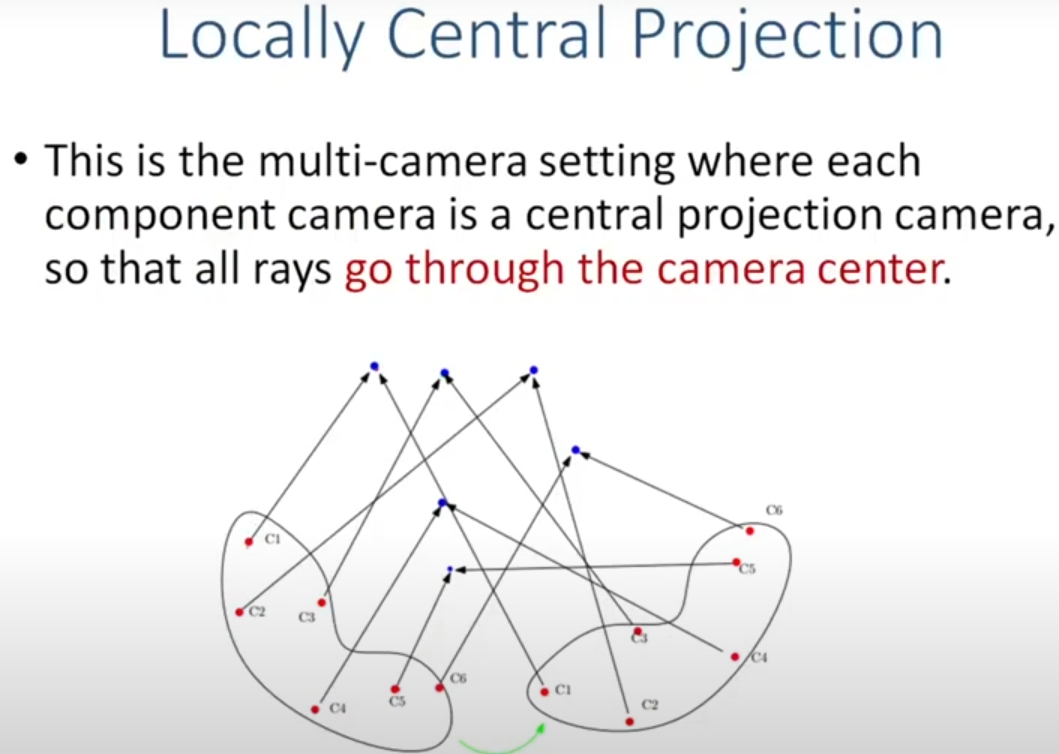
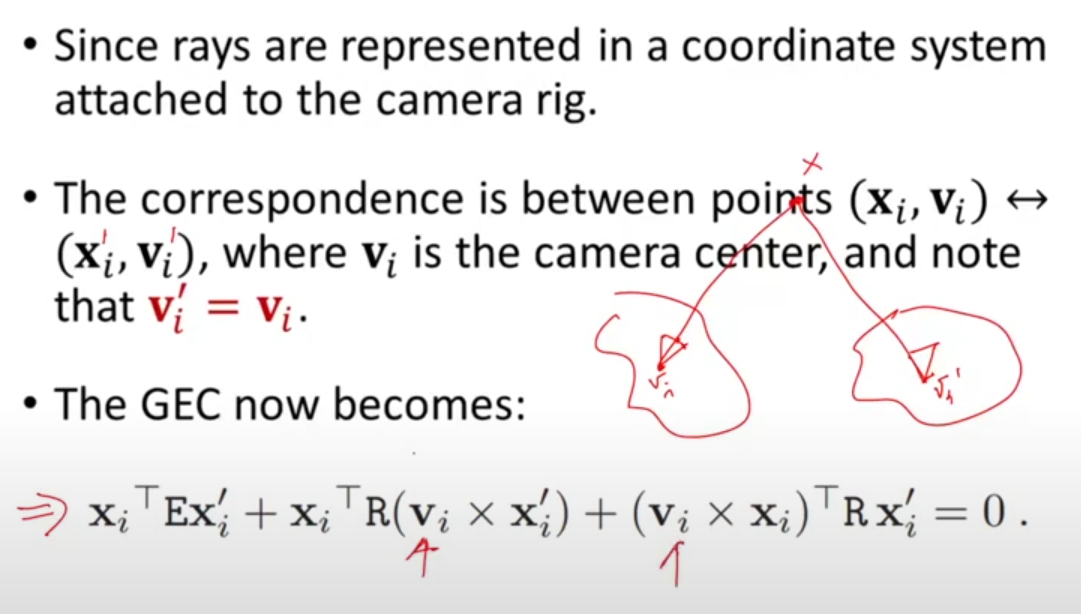
- 위의 그림처럼 두개의 generalized camera(각각의 center를 ) 에 의해 3차원 점 X가 로 projection된다고 가정.
- 이를 첫번째 카메라 frame에 맞춰주면(), 아래와 같은 GEC 식을 유도할 수 있음

Robotics, 3D-Vision, SpatialAI에 관심이 있습니다