Odometetor (오도미터)
차량이나 로봇이 주행하며 이동한 거리를 측정하는 기기
바퀴의 회전수로 이동거리를 계산함
Odometetry (오도메트리)
오도미터 등의 기기의 측정값으로 움직이는 사물의 위치를 측정하는 방법
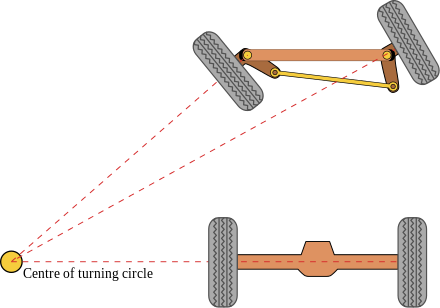
Ackermann Steering (스티어링 기하학 )
안쪽과 바깥쪽 회전 원의 중심이 일치해야 하므로
회전시 꺾이는 각도가 다름
https://en.wikipedia.org/wiki/Ackermann_steering_geometry
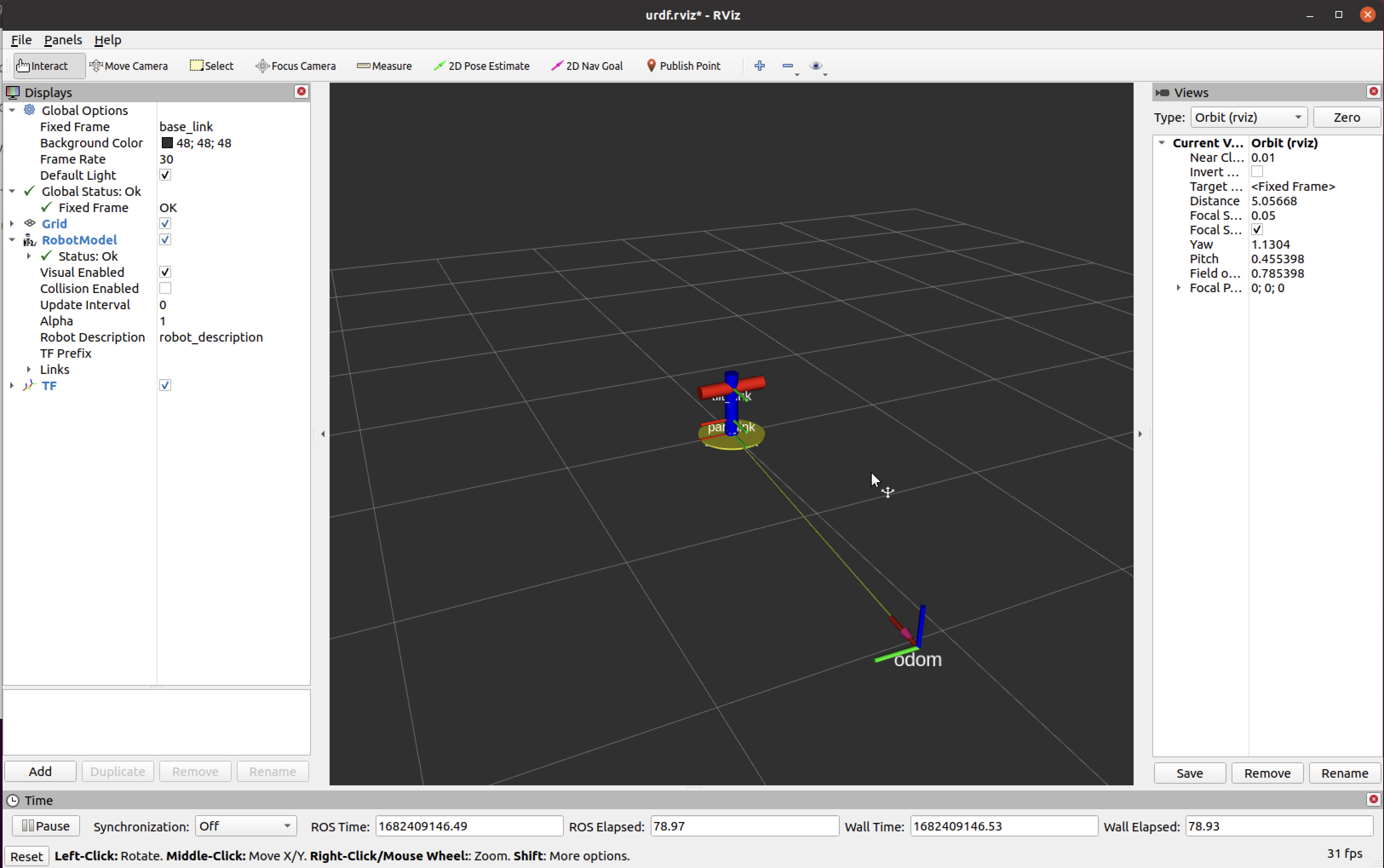
Odometry topic
- topic: /odom
- msgtype: nav_msgs/Odometry
$ rosmsg show nav_msgs/Odometry
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/Pose pose
geometry_msgs/Point position # 3차원 공간 좌표
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation # roll, yaw, picth 기울기 정보의 Quaternion 표기법
float64 x
float64 y
float64 z
float64 w
float64[36] covariance
geometry_msgs/TwistWithCovariance twist
geometry_msgs/Twist twist
geometry_msgs/Vector3 linear # 선속도
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular # 긱속도
float64 x
float64 y
float64 z
float64[36] covarianceOdometry Publisher
#!/usr/bin/env python3
import math
from math import sin, cos, pi
import rospy
import tf
from nav_msgs.msg import Odometry
from geometry_msgs.msg import Point, Pose, Quaternion, Twist, Vector3
rospy.init_node('odometry_publisher')
odom_pub = rospy.Publisher("odom", Odometry, queue_size=50)
odom_broadcaster = tf.TransformBroadcaster()
x = 0.0
y = 0.0
th = 0.0
vx = 0.1
vy = -0.1
vth = 0.1
current_time = rospy.Time.now()
last_time = rospy.Time.now()
r = rospy.Rate(1.0)
while not rospy.is_shutdown():
current_time = rospy.Time.now()
# compute odometry in a typical way given the velocities of the robot
dt = (current_time - last_time).to_sec()
delta_x = (vx * cos(th) - vy * sin(th)) * dt
delta_y = (vx * sin(th) + vy * cos(th)) * dt
delta_th = vth * dt
x += delta_x
y += delta_y
th += delta_th
# since all odometry is 6DOF we'll need a quaternion created from yaw
odom_quat = tf.transformations.quaternion_from_euler(0, 0, th)
# first, we'll publish the transform over tf
odom_broadcaster.sendTransform(
(x, y, 0.),
odom_quat,
current_time,
"base_link",
"odom"
)
# next, we'll publish the odometry message over ROS
odom = Odometry()
odom.header.stamp = current_time
odom.header.frame_id = "odom"
# set the position
odom.pose.pose = Pose(Point(x, y, 0.), Quaternion(*odom_quat))
# set the velocity
odom.child_frame_id = "base_link"
odom.twist.twist = Twist(Vector3(vx, vy, 0), Vector3(0, 0, vth))
# publish the message
odom_pub.publish(odom)
last_time = current_time
r.sleep()
성장지향형 자율주행 소프트웨어 개발자입니다. K-Digital-Training: 자율주행 데브코스 Planning & Control 1기로 활동하고 있습니다. 본 블로그를 통해 배움기록을 실천하고 있습니다. #자율주행 #기계공학