ROS turtlesim 실습
목표
1. master 실행 확인
2. subscriber node 실행 확인
3. publisher node 실행 확인
명령어
패키지 노드 실행
$ rosrun <패키지 명> <노드명>
terminal 1: master 실행
$ roscore
terminal 2: 토픽을 받아서 거북이를 이동시킴
$ rosrun turtlesim turtlesim_node
terminal 3: 사용자의 입력(키보드 방향키)에 따른 토픽 발행
$ rosrun turtlesim turtle_teleop_key
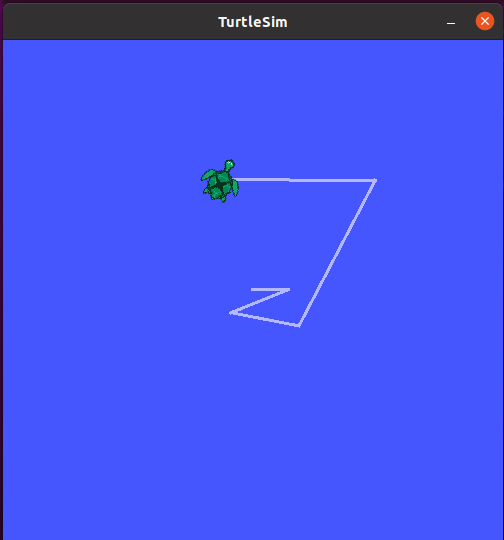
실행 결과: TurtleSim이 키보드 방향키 입력에 따라 이동함
terminal 4: 상태 확인
-
node list 출력
$ rosnode list
/rosout
/teleop_turtle
/turtlesim -
node 정보 출력
$ rosnode info -
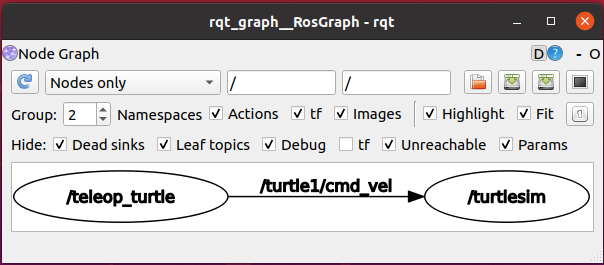
node와 topic의 관계 graph 출력
$ rqt_graph
-
publisher에서 발행한 topic list 확인
$ rostopic list
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose -
특정 topic이 확인될 때 마다 message를 출력
$ rostopic echo <topic>
성장지향형 자율주행 소프트웨어 개발자입니다. K-Digital-Training: 자율주행 데브코스 Planning & Control 1기로 활동하고 있습니다. 본 블로그를 통해 배움기록을 실천하고 있습니다. #자율주행 #기계공학