ROS
1.ROS install, workspace setup
참고 링크: https://velog.io/@deep-of-machine/ROS-ROS1-설치-Ubuntu20.04-ROS-NoeticROS를 제공하는 software repository 등록 (apt/sources.list)$ sudo sh -c 'echo
2023년 5월 3일
2.ROS package 의존성 추가

아래 코드로 패키지 생성 시 의존성을 추가한다.catkin_create_pkg {PKG_NAME} \[의존성]그런데 이미 생성된 패키지에 의존성을 추가하고 싶은 상황이다.package.xml 사용자화를 따르자.대상 패키지 경로로 이동하여 package.xml 파일을 편
2023년 5월 4일
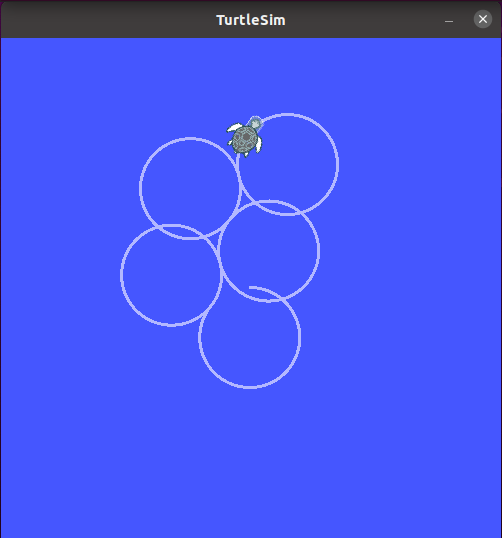
3.ROS practice #1 turtlesim
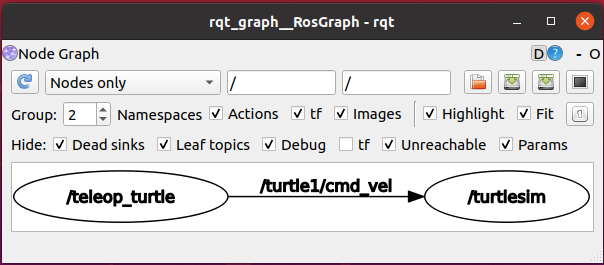
목표1\. master 실행 확인2\. subscriber node 실행 확인3\. publisher node 실행 확인terminal 1$ roscoreterminal 2$ rosrun turtlesim turtlesim_nodeterminal 3$ rosrun tu
2023년 5월 3일
4.ROS practice #2 turtlesim in package
turtlesim project
2023년 5월 3일
5.ROS Transform 정의와 사용법

ROS(로봇 운영체제)에서 sendTransform 함수는 로봇의 위치 및 자세 변환(Transform)을 표현하고, 이를 ROS 네트워크 상에서 다른 노드와 공유하기 위해 사용되는 함수입니다. 이 함수는 tf 라이브러리를 통해 제공되며, 로봇의 각 부분의 상대적인 위
2023년 8월 21일