1. PRM 알고리즘 개요
- 1996년 Kavraki 등에 의해 제안된 샘플링 경로 계획 방법
- 지도 전역에서 무작위로 샘플을 추출하고, 샘플들을 연결하여 지도 전역에 대한 로드맵을 생성
- 생성된 로드맵에 시작 지점과 도착 지점을 추가하여, 두 점을 연결하는 경로를 탐색
- 시작과 도착 지점이 변경되더라도, 생성된 로드맵을 재활용 가능
- 2단계로 구성
- 로드맵 구성 단계
- 경로 탐색 단계(쿼리 단계)
2. PRM 알고리즘 단계
1. 로드맵 구성 단계
- 로드맵 구성 단계의 Pseudo Code
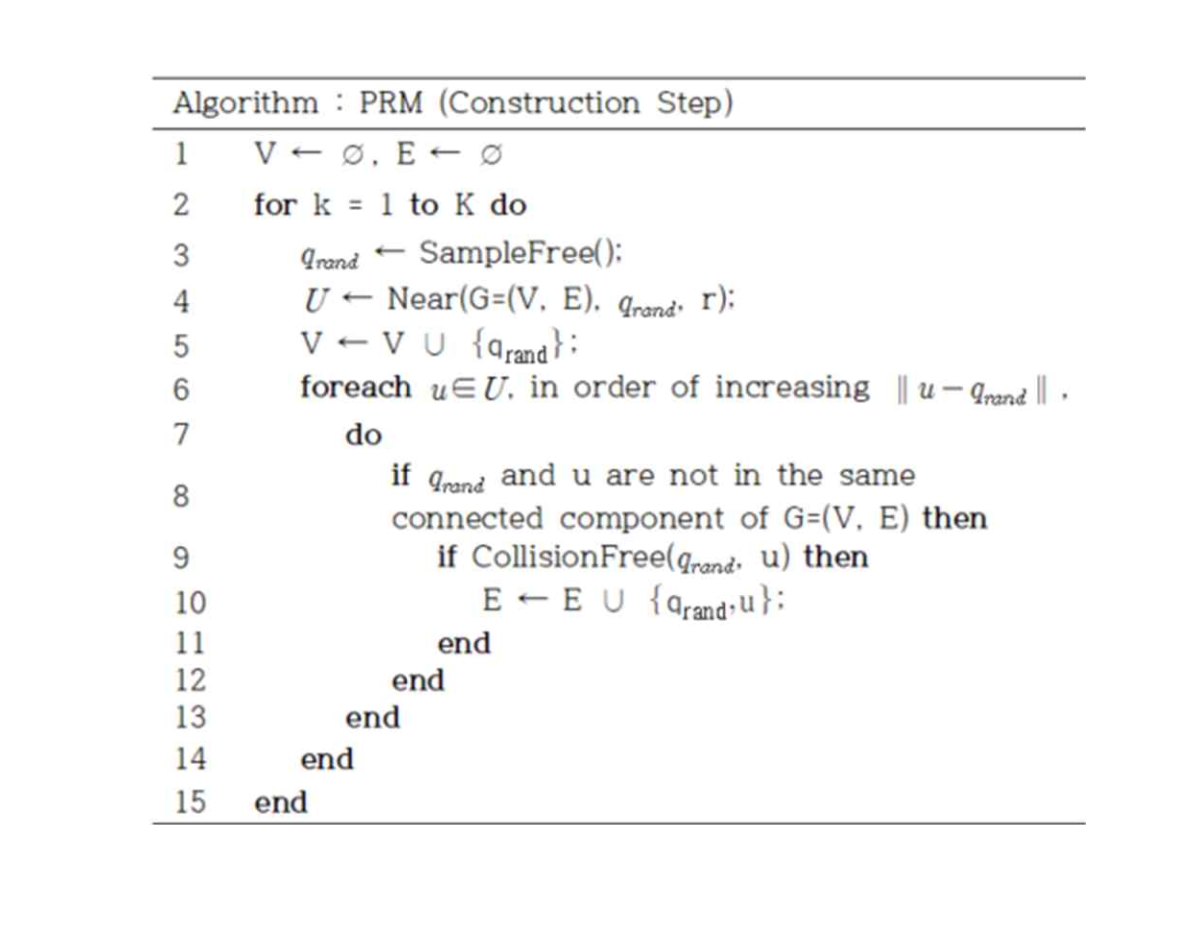
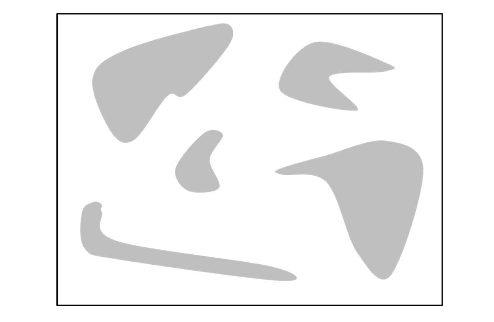
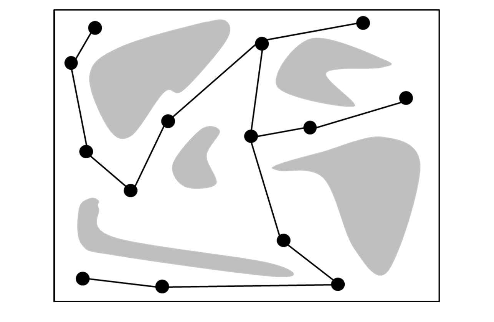
- 초기화
- 주어진 지도에서 노드(V) 및 간선(E)등을 초기화
- 흰색 영역 : 이동 가능한 영역
- 회색 영역 : 이동 불가능한 영역(예: 장애물 등)
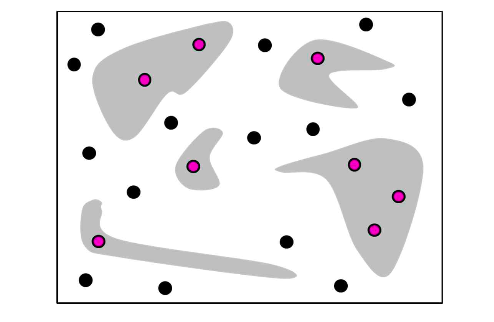
- Sample Free
- 주어진 지도에서 무작위로 샘플을 추출
- 검정색 노드 : 이동 가능한 노드
- 분홍색 노드 : 이동할 수 없는 영역에 위치한 노드
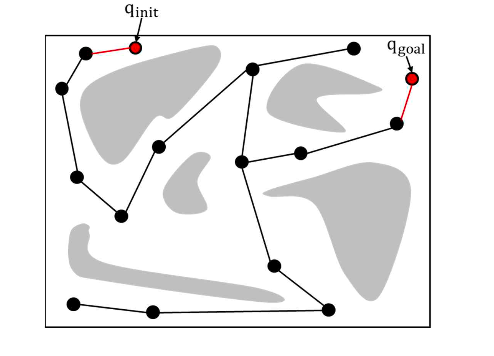
- Connecting Nodes
- 일정한 반경 내의 노드를 간선으로 연결
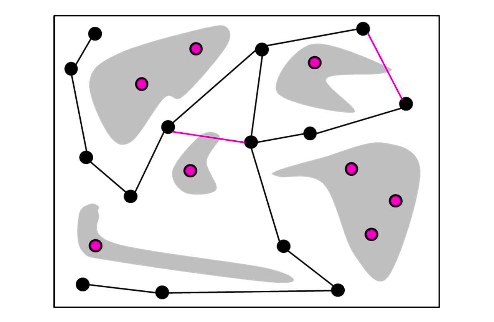
- Generate Roadmap
- 장애물 충돌 등으로 인하여 제외되는 노드 및 간선 등을 제외하고 로드맵을 완성
2. 경로 계획 단계
- Query Configure
- 로드맵에, 시작 노드와 도착 노드를 추가
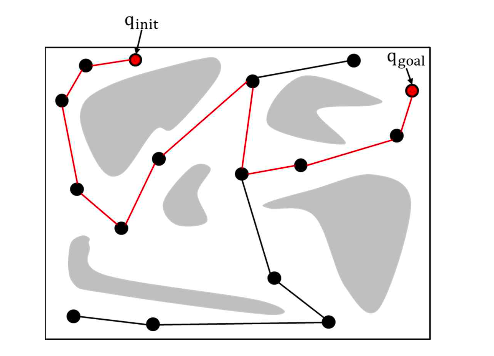
- Path Planning
- 시작 노드에서 도착 노드까지의 최단 경로를 탐색
3. PRM 실습 코드
# numpy와 networkx, matplotlib의 pyplot 모듈을 임포트합니다.
import numpy as np
import networkx as nx
import matplotlib.pyplot as plt
# scipy에서 유클리드 거리를 계산하기 위한 모듈을 임포트합니다.
from scipy.spatial.distance import euclidean
# 비어 있는 공간에서 장애물을 피하면서 지정된 개수의 샘플을 추출하는 함수를 정의합니다.
def sample_free_space(space_size, num_samples, obstacles):
samples = [] # 추출된 샘플을 담을 리스트를 초기화합니다.
while len(samples) < num_samples:
# 공간 내에서 임의의 점을 생성합니다. 좌표 범위는 0부터 space_size까지입니다.
point = np.random.uniform(0, space_size, 2)
# 생성된 점이 장애물과 충돌하지 않는지 확인합니다.
if not is_colliding(point, obstacles):
samples.append(tuple(point)) # 충돌하지 않으면 샘플 리스트에 추가합니다.
return samples
# 주어진 점이 장애물과 충돌하는지 확인하는 함수를 정의합니다.
def is_colliding(point, obstacles):
for obs in obstacles:
# 점과 장애물의 중심 사이의 거리가 장애물의 반지름보다 작으면 충돌로 간주합니다.
if euclidean(point, obs[0]) < obs[1]:
return True # 충돌이 있으면 True를 반환합니다.
return False
# 두 점을 연결하는 선분과 원형 장애물 사이의 충돌을 확인하는 함수를 정의합니다.
def line_circle_collision(p1, p2, center, radius):
# p1과 p2를 연결하는 직선의 방향 벡터를 구합니다.
d = np.array(p2) - np.array(p1)
f = np.array(p1) - center # 장애물 중심과 p1의 거리 벡터를 구합니다.
# 이차 방정식의 계수를 계산합니다.
a = np.dot(d, d)
b = 2*np.dot(f, d)
c = np.dot(f, f) - radius*radius
discriminant = b*b - 4*a*c # 판별식을 계산합니다.
if discriminant < 0:
return False # 판별식이 음수면 교점이 없으므로 충돌이 없는 것으로 판단합니다.
t1 = (-b - np.sqrt(discriminant)) / (2*a) # 교점의 파라미터 값을 계산합니다.
t2 = (-b + np.sqrt(discriminant)) / (2*a)
# 두 교점 중 하나라도 선분 내에 있으면 충돌이 있는 것으로 판단합니다.
if (t1 >= 0 and t1 < 1) or (t2 >= 0 and t2 <= 1):
return True
return False
# 두 점을 연결하는 선분과 장애물 사이의 충돌을 확인하는 함수를 정의합니다.
def is_edge_colliding(p1, p2, obstacles):
for obs in obstacles:
if line_circle_collision(p1, p2, obs[0], obs[1]):
return True # 충돌이 있으면 True를 반환합니다.
return False
# 생성된 노드들을 최대 거리 내에서 연결하는 함수를 정의합니다.
def connect_nodes(nodes, max_distance, obstacles):
edges = [] # 생성된 엣지를 담을 리스트를 초기화합니다.
for i, n1 in enumerate(nodes):
for n2 in nodes[i+1:]:
n1_array, n2_array = np.array(n1), np.array(n2)
# 두 노드 사이의 거리가 최대 거리 이내이고 충돌이 없으면 엣지를 추가합니다.
if euclidean(n1_array, n2_array) <= max_distance:
if not is_edge_colliding(n1_array, n2_array, obstacles):
edges.append([n1, n2])
return edges
# PRM(Probabilistic Roadmap) 알고리즘을 실행하는 함수를 정의합니다.
def prm(space_size, num_samples, max_distance, start, goal, obstacles):
if is_colliding(start, obstacles) or is_colliding(goal, obstacles):
print("Start or goal position is in collision") # 시작점이나 목표점이 충돌하면 에러 메시지를 출력합니다.
return None
start = tuple(start) # 시작점을 튜플 형태로 변환합니다.
goal = tuple(goal) # 목표점을 튜플 형태로 변환합니다.
# 시작점과 목표점을 포함하여 무작위 샘플을 추출합니다.
nodes = sample_free_space(space_size, num_samples, obstacles)
nodes = [start] + nodes + [goal] # 시작점과 목표점을 추가합니다.
# 노드들을 최대 거리 내에서 연결하여 엣지를 생성합니다.
edges = connect_nodes(nodes, max_distance, obstacles)
# 그래프를 생성하고, 시작점에서 목표점까지의 경로가 있는지 확인합니다.
graph = nx.Graph()
graph.add_nodes_from(nodes)
graph.add_edges_from(edges)
if nx.has_path(graph, start, goal):
# 시작점에서 목표점까지의 최단 경로를 찾습니다.
path = nx.shortest_path(graph, start, goal, weight="distance")
return path, nodes, edges
else:
return None, nodes, edges
# PRM 알고리즘의 결과를 시각화하는 함수를 정의합니다.
def plot_prm(start, goal, space_size, obstacles, nodes, edges, path):
fig, ax = plt.subplots()
# 장애물을 그립니다.
for obs in obstacles:
circle = plt.Circle(obs[0], obs[1], color="gray", alpha=0.5)
ax.add_artist(circle)
# 노드들을 그립니다.
for node in nodes:
plt.scatter(*node, c='b', s=10)
# 엣지를 그립니다.
for edge in edges:
plt.plot([edge[0][0], edge[1][0]], [edge[0][1], edge[1][1]], 'k-', lw=0.5)
# 시작점과 목표점을 그립니다.
ax.plot(start[0], start[1], 'bo', markersize=10, label="Start")
ax.plot(goal[0], goal[1], 'mo', markersize=10, label="Target")
if path:
# 경로를 그립니다.
plt.plot(*zip(*path), 'go-', lw=2)
# 그래프의 범위를 설정합니다.
plt.xlim(0, space_size)
plt.ylim(0, space_size)
plt.legend()
plt.show()
if __name__ == "__main__":
space_size = 100 # 공간의 크기를 설정합니다.
num_samples = 100 # 샘플의 개수를 설정합니다.
max_distance = 20 # 최대 거리를 설정합니다.
start = np.array([5,5]) # 시작점을 설정합니다.
goal = np.array([95, 95]) # 목표점을 설정합니다.
obstacles = [(np.array([50, 50]), 10), (np.array([30,70]), 5), (np.array([70, 30]), 5)] # 장애물을 설정합니다.
# PRM 알고리즘을 실행하고 결과를 받습니다.
path, nodes, edges = prm(space_size, num_samples, max_distance, start, goal, obstacles)
if path:
print("Path found:", path) # 경로가 있으면 경로를 출력합니다.
# 결과를 시각화합니다.
plot_prm(start, goal, space_size, obstacles, nodes, edges, path)
else:
print("No path found") # 경로가 없으면 에러 메시지를 출력합니다.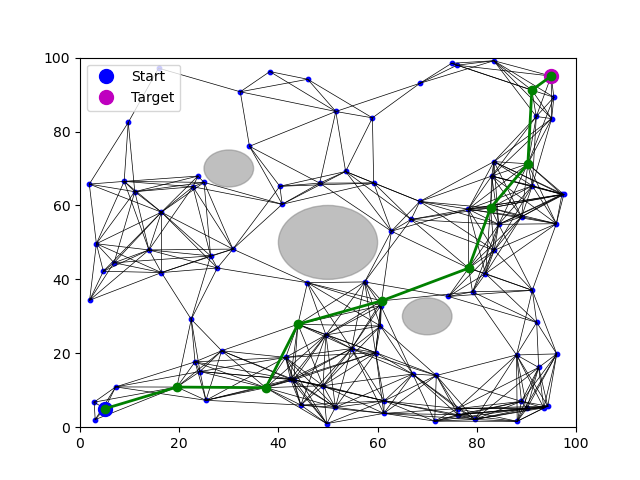
4. PRM 알고리즘 고려사항
- 샘플링 방법
- 균등(Uniform)랜덤 샘플링은 구현하기 쉽고, 무난한 방법 중 하나
- 한계: 좁은 통로가 있는 경우, 통로의 좁은 영역에서 샘플을 선택해야만 적절한 로드맵을 생성하여 경로를 탐색할 수 있음
- 다양한 샘플링 방법에 대한 연구
- 장애물 충돌 시 방향성을 고려
- 가우시안 분포 등 이용
- 노드 연결 방법
- 인접한 노드에 대한 연결 개수가 증가하는 경우
- 충돌이 없고, 거리가 짧은 경로가 생성될 가능성이 높아지지만 연산 시간과 메모리 사용량이 증가
- 연산 시간 및 메모리 사용량 등을 고려하여 적당한 길이의 경로를 적당한 개수만큼 연결하는 것이 필요
- 거리 계산 방법
- 노드를 샘플링하거나 노드 간 거리를 재고 간선을 연결할 때, 거리 계산이 반복적으로 수행 -> 알고리즘의 수행 시간에 영향
- 풀어야 하는 문제와 필요한 연산의 정확도 등에 따라, 거리 계산의 정확도와 그에 따른 연산량 증가 등을 고려하여, 적절한 방법의 선택 필요
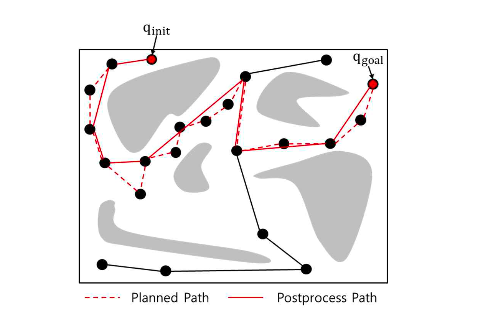
- 후처리
- 생성된 경로를 후처리하여 경로의 품질을 개선
- 후처리를 통해 경로를 단축하거나 평탄화

Robotics