1. 액션(Action)
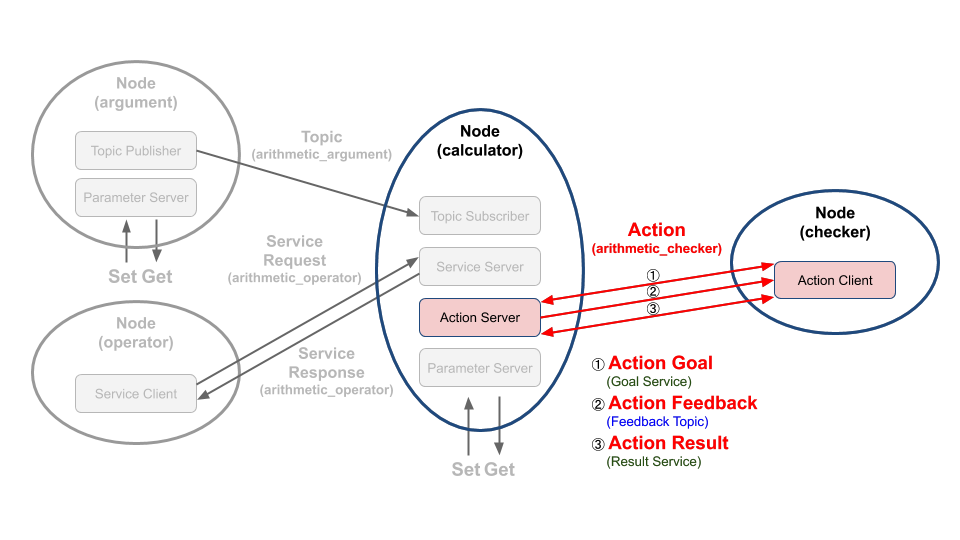
액션(Action)은 비동기식+동기식 양방향 메시지 송수신 방식으로 액션 목표(Goal)를 지정하는 액션 클라이언트(Action Client)와 액션 목표를 받아 특정 테스크를 수행하면서 중간 결괏값을 전송하는 액션 피드백(Action FeedBack) 그리고 최종 결괏값에 해당되는 액션 결과(Action Result)를 전송하는 액션 서버(Action Server)간의 통신이다.
이번 강좌에서는 아래 그림과 같이 액션 목표를 지정하는 액션 클라이언트와 액션 목표를 받아 특정 태스크를 수행하면서 그 중간 결괏값을 전송하는 액션 피드백 그리고 최종 결괏값에 해당되는 액션 결과를 전송하는 액션 서버를 작성해 볼 것이다.
2. 액션 서버 코드
액션 서버 역할을 하는 노드는 Calculator 노드로 전체 소스코드는 다음과 같다.
#ifndef CALCULATOR__CALCULATOR_HPP_
#define CALCULATOR__CALCULATOR_HPP_
#include <memory>
#include <sstream>
#include <string>
#include <utility>
#include <vector>
#include <stdexcept>
#include "rclcpp/rclcpp.hpp"
#include "rclcpp_action/rclcpp_action.hpp"
#include "msg_srv_action_interface_example/msg/arithmetic_argument.hpp"
#include "msg_srv_action_interface_example/srv/arithmetic_operator.hpp"
#include "msg_srv_action_interface_example/action/arithmetic_checker.hpp"
class Calculator : public rclcpp::Node
{
public:
using ArithmeticArgument = msg_srv_action_interface_example::msg::ArithmeticArgument;
using ArithmeticOperator = msg_srv_action_interface_example::srv::ArithmeticOperator;
using ArithmeticChecker = msg_srv_action_interface_example::action::ArithmeticChecker;
using GoalHandleArithmeticChecker = rclcpp_action::ServerGoalHandle<ArithmeticChecker>;
explicit Calculator(const rclcpp::NodeOptions & node_options = rclcpp::NodeOptions());
virtual ~Calculator();
float calculate_given_formula(const float & a, const float & b, const int8_t & operators);
private:
rclcpp_action::GoalResponse handle_goal(
const rclcpp_action::GoalUUID & uuid,
std::shared_ptr<const ArithmeticChecker::Goal> goal);
rclcpp_action::CancelResponse handle_cancel(
const std::shared_ptr<GoalHandleArithmeticChecker> goal_handle);
void execute_checker(const std::shared_ptr<GoalHandleArithmeticChecker> goal_handle);
rclcpp::Subscription<ArithmeticArgument>::SharedPtr
arithmetic_argument_subscriber_;
rclcpp::Service<ArithmeticOperator>::SharedPtr
arithmetic_argument_server_;
rclcpp_action::Server<ArithmeticChecker>::SharedPtr
arithmetic_action_server_;
float argument_a_;
float argument_b_;
int8_t argument_operator_;
float argument_result_;
std::string argument_formula_;
std::vector<std::string> operator_;
};
#endif // CALCULATOR__CALCULATOR_HPP_#include <memory>
#include <sstream>
#include <string>
#include <utility>
#include <vector>
#include <stdexcept>
#include "calculator/calculator.hpp"
Calculator::Calculator(const rclcpp::NodeOptions & node_options)
: Node("calculator", node_options),
argument_a_(0.0),
argument_b_(0.0),
argument_operator_(0),
argument_result_(0.0),
argument_formula_("")
{
RCLCPP_INFO(this->get_logger(), "Run calculator");
operator_.reserve(4);
operator_.push_back("+");
operator_.push_back("-");
operator_.push_back("*");
operator_.push_back("/");
this->declare_parameter("qos_depth", 10);
int8_t qos_depth = 0;
this->get_parameter("qos_depth", qos_depth);
const auto QOS_RKL10V =
rclcpp::QoS(rclcpp::KeepLast(qos_depth)).reliable().durability_volatile();
arithmetic_argument_subscriber_ = this->create_subscription<ArithmeticArgument>(
"arithmetic_argument",
QOS_RKL10V,
[this](const ArithmeticArgument::SharedPtr msg) -> void
{
argument_a_ = msg->argument_a;
argument_b_ = msg->argument_b;
RCLCPP_INFO(
this->get_logger(),
"Timestamp of the message: sec %ld nanosec %ld",
msg->stamp.sec,
msg->stamp.nanosec);
RCLCPP_INFO(this->get_logger(), "Subscribed argument a: %.2f", argument_a_);
RCLCPP_INFO(this->get_logger(), "Subscribed argument b: %.2f", argument_b_);
}
);
auto get_arithmetic_operator =
[this](
const std::shared_ptr<ArithmeticOperator::Request> request,
std::shared_ptr<ArithmeticOperator::Response> response) -> void
{
argument_operator_ = request->arithmetic_operator;
argument_result_ =
this->calculate_given_formula(argument_a_, argument_b_, argument_operator_);
response->arithmetic_result = argument_result_;
std::ostringstream oss;
oss << std::to_string(argument_a_) << ' ' <<
operator_[argument_operator_ - 1] << ' ' <<
std::to_string(argument_b_) << " = " <<
argument_result_ << std::endl;
argument_formula_ = oss.str();
RCLCPP_INFO(this->get_logger(), "%s", argument_formula_.c_str());
};
arithmetic_argument_server_ =
create_service<ArithmeticOperator>("arithmetic_operator", get_arithmetic_operator);
using namespace std::placeholders;
arithmetic_action_server_ = rclcpp_action::create_server<ArithmeticChecker>(
this->get_node_base_interface(),
this->get_node_clock_interface(),
this->get_node_logging_interface(),
this->get_node_waitables_interface(),
"arithmetic_checker",
std::bind(&Calculator::handle_goal, this, _1, _2),
std::bind(&Calculator::handle_cancel, this, _1),
std::bind(&Calculator::execute_checker, this, _1)
);
}
Calculator::~Calculator()
{
}
float Calculator::calculate_given_formula(
const float & a,
const float & b,
const int8_t & operators)
{
float argument_result = 0.0;
ArithmeticOperator::Request arithmetic_operator;
if (operators == arithmetic_operator.PLUS) {
argument_result = a + b;
} else if (operators == arithmetic_operator.MINUS) {
argument_result = a - b;
} else if (operators == arithmetic_operator.MULTIPLY) {
argument_result = a * b;
} else if (operators == arithmetic_operator.DIVISION) {
argument_result = a / b;
if (b == 0.0) {
RCLCPP_ERROR(this->get_logger(), "ZeroDivisionError!");
argument_result = 0.0;
return argument_result;
}
} else {
RCLCPP_ERROR(
this->get_logger(),
"Please make sure arithmetic operator(plus, minus, multiply, division).");
argument_result = 0.0;
}
return argument_result;
}
rclcpp_action::GoalResponse Calculator::handle_goal(
const rclcpp_action::GoalUUID & uuid,
std::shared_ptr<const ArithmeticChecker::Goal> goal)
{
(void)uuid;
(void)goal;
return rclcpp_action::GoalResponse::ACCEPT_AND_EXECUTE;
}
rclcpp_action::CancelResponse Calculator::handle_cancel(
const std::shared_ptr<GoalHandleArithmeticChecker> goal_handle)
{
RCLCPP_INFO(this->get_logger(), "Received request to cancel goal");
(void)goal_handle;
return rclcpp_action::CancelResponse::ACCEPT;
}
void Calculator::execute_checker(const std::shared_ptr<GoalHandleArithmeticChecker> goal_handle)
{
RCLCPP_INFO(this->get_logger(), "Execute arithmetic_checker action!");
rclcpp::Rate loop_rate(1);
auto feedback_msg = std::make_shared<ArithmeticChecker::Feedback>();
float total_sum = 0.0;
float goal_sum = goal_handle->get_goal()->goal_sum;
while ((total_sum < goal_sum) && rclcpp::ok()) {
total_sum += argument_result_;
feedback_msg->formula.push_back(argument_formula_);
if (argument_formula_.empty()) {
RCLCPP_WARN(this->get_logger(), "Please check your formula");
break;
}
RCLCPP_INFO(this->get_logger(), "Feedback: ");
for (const auto & formula : feedback_msg->formula) {
RCLCPP_INFO(this->get_logger(), "\t%s", formula.c_str());
}
goal_handle->publish_feedback(feedback_msg);
loop_rate.sleep();
}
if (rclcpp::ok()) {
auto result = std::make_shared<ArithmeticChecker::Result>();
result->all_formula = feedback_msg->formula;
result->total_sum = total_sum;
goal_handle->succeed(result);
}
}이 코드는 이전 장과 마찬가지로 매우 길기 때문에 액션 서버 부분만 살펴보겠다.
Calculator 클래스는 rclcpp::Node 를 상속받고 있으며 생성자에서 calculator 라는 노드 이름으로 초기화되어 있다.
arithmetic_action_server 멤버 변수는 rclcpp_action::Server 타입의 스마트 포인터 변수이다. 토픽과 서비스 통신을 위한 멤버 변수들을 rclcpp::Publisher, rclcpp:Service 와 같이 rclcpp 네임스페이스를 가지는데 반해 액션 통신을 위한 변수들은 rclcpp_action 네임스페이스를 가진다. arithmetic_action_server 멤버 변수는 해당 노드의 정보들과 액션명 그리고 콜백 함수들을 인자로 가지는 rclcpp_action::create_server 함수를 통해 실체화 된다.
arithmetic_action_server_ = rclcpp_action::create_server<ArithmeticChecker>(
this->get_node_base_interface(),
this->get_node_clock_interface(),
this->get_node_logging_interface(),
this->get_node_waitables_interface(),
"arithmetic_checker",
std::bind(&Calculator::handle_goal, this, _1, _2),
std::bind(&Calculator::handle_cancel, this, _1),
std::bind(&Calculator::execute_checker, this, _1)
);
}handle_goal 함수는 액션 클라이언트에서 액션 목표(Goal)를 요청했을 때 콜백되는 함수이다. 해당 함수의 인자로 액션 클라이언트 메시지의 UUID(Universally Unique IDentifier)와 액션 목푯값을 확인할 수 있다. 그리고 액션 목푯값에 대한 처리를 통해 태스크를 진행할지 그렇지 아니할지를 리턴값으로 보낼 수 있다. 이는 마치 서비스 통신처럼 동작한다.
rclcpp_action::GoalResponse Calculator::handle_goal(
const rclcpp_action::GoalUUID & uuid,
std::shared_ptr<const ArithmeticChecker::Goal> goal)
{
(void)uuid;
(void)goal;
return rclcpp_action::GoalResponse::ACCEPT_AND_EXECUTE;
}handle_cancel 함수는 액션 클라이언트에서 액션 취소를 요청했을 때 콜백되는 함수이다. 해당 함수 인자로 ServerGoalHandle 타입을 사용하며 진행 중이었던 태스크의 결괏값, 진행상황, 상태 등을 넘겨주는 동작을 수행할 수 있다.
rclcpp_action::CancelResponse Calculator::handle_cancel(
const std::shared_ptr<GoalHandleArithmeticChecker> goal_handle)
{
RCLCPP_INFO(this->get_logger(), "Received request to cancel goal");
(void)goal_handle;
return rclcpp_action::CancelResponse::ACCEPT;
}execute_checker 함수는 액션 클라이언트에서 요청한 액션 목표를 가지고 실제 태스크가 진행되는 함수이다. 해당 함수 내부에서는 ServerGoalHandle 타입의 인자를 가지고 액션 목표와 액션 피드백 그리고 액션 결괏값에 접근할 수 있다.
함수 내부에서는 먼저 ServerGoalHandle 클래스의 get_goal 멤버 함수를 통해 액션 클라이언트에서 보낸 액션 목표를 가져와서 Calculator 클래스의 argument_result 멤버 변숫값의 누적값과 비교한다. 그리고 반복문이 동작할 때마다 Calculator 클래스의 argument_formula 멤버 변수를 액션 클라이언트에 피드백으로 publish 해주는 모습을 확인할 수 있다.
만약 argument_result 멤버 변숫값의 누적값이 액션 목표(goal_sum 변수) 보다 크다면, 전체 연산식과 연산 누적값을 액션 클라이언트에 액션 결괏값으로 넘겨준다.
void Calculator::execute_checker(const std::shared_ptr<GoalHandleArithmeticChecker> goal_handle)
{
RCLCPP_INFO(this->get_logger(), "Execute arithmetic_checker action!");
rclcpp::Rate loop_rate(1);
auto feedback_msg = std::make_shared<ArithmeticChecker::Feedback>();
float total_sum = 0.0;
float goal_sum = goal_handle->get_goal()->goal_sum;
while ((total_sum < goal_sum) && rclcpp::ok()) {
total_sum += argument_result_;
feedback_msg->formula.push_back(argument_formula_);
if (argument_formula_.empty()) {
RCLCPP_WARN(this->get_logger(), "Please check your formula");
break;
}
RCLCPP_INFO(this->get_logger(), "Feedback: ");
for (const auto & formula : feedback_msg->formula) {
RCLCPP_INFO(this->get_logger(), "\t%s", formula.c_str());
}
goal_handle->publish_feedback(feedback_msg);
loop_rate.sleep();
}
if (rclcpp::ok()) {
auto result = std::make_shared<ArithmeticChecker::Result>();
result->all_formula = feedback_msg->formula;
result->total_sum = total_sum;
goal_handle->succeed(result);
}
}3. 액션 클라이언트 코드
액션 클라이언트 역할을 하는 노드는 checker 노드로 전체 소스코드는 다음과 같다.
#ifndef CHECKER__CHECKER_HPP_
#define CHECKER__CHECKER_HPP_
#include <memory>
#include <string>
#include <utility>
#include "rclcpp/rclcpp.hpp"
#include "rclcpp_action/rclcpp_action.hpp"
#include "msg_srv_action_interface_example/action/arithmetic_checker.hpp"
class Checker : public rclcpp::Node
{
public:
using ArithmeticChecker = msg_srv_action_interface_example::action::ArithmeticChecker;
using GoalHandleArithmeticChecker = rclcpp_action::ClientGoalHandle<ArithmeticChecker>;
explicit Checker(
float goal_sum,
const rclcpp::NodeOptions & node_options = rclcpp::NodeOptions());
virtual ~Checker();
private:
void send_goal_total_sum(float goal_sum);
void get_arithmetic_action_goal(
std::shared_future<rclcpp_action::ClientGoalHandle<ArithmeticChecker>::SharedPtr> future);
void get_arithmetic_action_feedback(
GoalHandleArithmeticChecker::SharedPtr,
const std::shared_ptr<const ArithmeticChecker::Feedback> feedback);
void get_arithmetic_action_result(
const GoalHandleArithmeticChecker::WrappedResult & result);
rclcpp_action::Client<ArithmeticChecker>::SharedPtr arithmetic_action_client_;
};
#endif // CHECKER__CHECKER_HPP_#include <memory>
#include "checker/checker.hpp"
Checker::Checker(float goal_sum, const rclcpp::NodeOptions & node_options)
: Node("checker", node_options)
{
arithmetic_action_client_ = rclcpp_action::create_client<ArithmeticChecker>(
this->get_node_base_interface(),
this->get_node_graph_interface(),
this->get_node_logging_interface(),
this->get_node_waitables_interface(),
"arithmetic_checker");
send_goal_total_sum(goal_sum);
}
Checker::~Checker()
{
}
void Checker::send_goal_total_sum(float goal_sum)
{
using namespace std::placeholders;
if (!this->arithmetic_action_client_) {
RCLCPP_WARN(this->get_logger(), "Action client not initialized");
}
if (!this->arithmetic_action_client_->wait_for_action_server(std::chrono::seconds(10))) {
RCLCPP_WARN(this->get_logger(), "Arithmetic action server is not available.");
return;
}
auto goal_msg = ArithmeticChecker::Goal();
goal_msg.goal_sum = goal_sum;
auto send_goal_options = rclcpp_action::Client<ArithmeticChecker>::SendGoalOptions();
send_goal_options.goal_response_callback =
std::bind(&Checker::get_arithmetic_action_goal, this, _1);
send_goal_options.feedback_callback =
std::bind(&Checker::get_arithmetic_action_feedback, this, _1, _2);
send_goal_options.result_callback =
std::bind(&Checker::get_arithmetic_action_result, this, _1);
this->arithmetic_action_client_->async_send_goal(goal_msg, send_goal_options);
}
void Checker::get_arithmetic_action_goal(
std::shared_future<GoalHandleArithmeticChecker::SharedPtr> future)
{
auto goal_handle = future.get();
if (!goal_handle) {
RCLCPP_WARN(this->get_logger(), "Action goal rejected.");
} else {
RCLCPP_INFO(this->get_logger(), "Action goal accepted.");
}
}
void Checker::get_arithmetic_action_feedback(
GoalHandleArithmeticChecker::SharedPtr,
const std::shared_ptr<const ArithmeticChecker::Feedback> feedback)
{
RCLCPP_INFO(this->get_logger(), "Action feedback: ");
for (const auto & formula : feedback->formula) {
RCLCPP_INFO(this->get_logger(), "\t%s ", formula.c_str());
}
}
void Checker::get_arithmetic_action_result(
const GoalHandleArithmeticChecker::WrappedResult & result)
{
switch (result.code) {
case rclcpp_action::ResultCode::SUCCEEDED:
RCLCPP_INFO(this->get_logger(), "Action succeeded!");
RCLCPP_INFO(this->get_logger(), "Action result(all formula): ");
for (const auto & formula : result.result->all_formula) {
RCLCPP_INFO(this->get_logger(), "\t%s ", formula.c_str());
}
RCLCPP_INFO(this->get_logger(), "Action result(total sum): ");
RCLCPP_INFO(this->get_logger(), "\t%.2f ", result.result->total_sum);
break;
case rclcpp_action::ResultCode::ABORTED:
RCLCPP_WARN(this->get_logger(), "The action was aborted");
return;
case rclcpp_action::ResultCode::CANCELED:
RCLCPP_WARN(this->get_logger(), "The action was canceled");
return;
default:
RCLCPP_ERROR(this->get_logger(), "Unknown result code");
return;
}
rclcpp::shutdown();
}헤더 파일에 선언된 Checker 클래스를 보자. Checker 클래스는 rclcpp:Node 클래스를 상속받고, 생성자에서 goal_sum 변수와 rclcpp::NodeOptions를 인자로 받는다. goal_sum 변수의 경우 추후에 실행 인자 프로그래밍에서 더 자세히 다루도록 하겠다. 멤버 함수로는 액션 요청을 위한 send_goal_total_sum 함수와 액션 동작시 호출되는 콜백 함수들 그리고 멤버 변수로 rclcpp_action::Client 타입의 스마트 포인터를 확인할 수 있다.
class Checker : public rclcpp::Node
{
public:
using ArithmeticChecker = msg_srv_action_interface_example::action::ArithmeticChecker;
using GoalHandleArithmeticChecker = rclcpp_action::ClientGoalHandle<ArithmeticChecker>;
explicit Checker(
float goal_sum,
const rclcpp::NodeOptions & node_options = rclcpp::NodeOptions());
virtual ~Checker();
private:
void send_goal_total_sum(float goal_sum);
void get_arithmetic_action_goal(
std::shared_future<rclcpp_action::ClientGoalHandle<ArithmeticChecker>::SharedPtr> future);
void get_arithmetic_action_feedback(
GoalHandleArithmeticChecker::SharedPtr,
const std::shared_ptr<const ArithmeticChecker::Feedback> feedback);
void get_arithmetic_action_result(
const GoalHandleArithmeticChecker::WrappedResult & result);
rclcpp_action::Client<ArithmeticChecker>::SharedPtr arithmetic_action_client_;
};Checker 노드의 생성자를 보자. 먼저 부모 클래스인 rclcpp::Node를 노드명과 node_options 인자로 초기화해준다. 그리고 rclcpp_action::create_client 함수를 통해 해당 노드의 인터페이스들과 액션명을 인자로 받아 rclcpp_action::Client를 실체화 시켜준다. 다음으로 액션 목푯값을 보내주는 send_goal_toal_sum 함수를 호출한다.
Checker::Checker(float goal_sum, const rclcpp::NodeOptions & node_options)
: Node("checker", node_options)
{
arithmetic_action_client_ = rclcpp_action::create_client<ArithmeticChecker>(
this->get_node_base_interface(),
this->get_node_graph_interface(),
this->get_node_logging_interface(),
this->get_node_waitables_interface(),
"arithmetic_checker");
send_goal_total_sum(goal_sum);
}send_goal_total_sum 함수는 goal_sum 변수를 인자로 받아 액션 목푯값을 보내주는 역할을 한다. 먼저 액션 클라이언트가 실체화되었는지 확인하고, 액션 서버와 통신할 수 있는지 확인한다. 액션 목푯값을 설정하기 위해서 ArithmeticChecker 액션 인터페이스의 Goal 메시지를 불러와 함수의 인자로 받은 goal_sum 변수를 넘겨준다. 그리고 rclcpp_action::Client의 SendGoalOptions 구조체를 통해 goal_response_callback, feedback_callback, result_callback 함수를 초기화시켜주면 이를 Goal 메시지와 함께 async_send_goal 함수의 인자에 담아 액션 서버에 보낼 수 있다.
void Checker::send_goal_total_sum(float goal_sum)
{
using namespace std::placeholders;
if (!this->arithmetic_action_client_) {
RCLCPP_WARN(this->get_logger(), "Action client not initialized");
}
if (!this->arithmetic_action_client_->wait_for_action_server(std::chrono::seconds(10))) {
RCLCPP_WARN(this->get_logger(), "Arithmetic action server is not available.");
return;
}
auto goal_msg = ArithmeticChecker::Goal();
goal_msg.goal_sum = goal_sum;
auto send_goal_options = rclcpp_action::Client<ArithmeticChecker>::SendGoalOptions();
send_goal_options.goal_response_callback =
std::bind(&Checker::get_arithmetic_action_goal, this, _1);
send_goal_options.feedback_callback =
std::bind(&Checker::get_arithmetic_action_feedback, this, _1, _2);
send_goal_options.result_callback =
std::bind(&Checker::get_arithmetic_action_result, this, _1);
this->arithmetic_action_client_->async_send_goal(goal_msg, send_goal_options);
}get_arithmetic_action_goal 함수는 앞서 설정한 SendGoalOptions의 goal_response_callback으로 앞서 설명했던 액션 서버의 handle_goal 함수와 연결되어 있다. 이는 서비스 통신 처럼 동작하며, 액션 목푯값을 보내고 난 뒤 이에 대한 첫 번째 응답을 확인할 수 있다.
void Checker::get_arithmetic_action_goal(
std::shared_future<GoalHandleArithmeticChecker::SharedPtr> future)
{
auto goal_handle = future.get();
if (!goal_handle) {
RCLCPP_WARN(this->get_logger(), "Action goal rejected.");
} else {
RCLCPP_INFO(this->get_logger(), "Action goal accepted.");
}
}get_arithmetic_action_feedback 함수는 앞서 설정한 SendGoalOptions 의 feedback_callback 으로 앞서 설명했던 액션 서버의 execute_checker 함수와 연결되어 있다. 액션 인터페이스의 feedback 메시지를 매개변수로 가지고 있어서 이를 이용하여 액션 피드백을 확인할 수 있다.
void Checker::get_arithmetic_action_feedback(
GoalHandleArithmeticChecker::SharedPtr,
const std::shared_ptr<const ArithmeticChecker::Feedback> feedback)
{
RCLCPP_INFO(this->get_logger(), "Action feedback: ");
for (const auto & formula : feedback->formula) {
RCLCPP_INFO(this->get_logger(), "\t%s ", formula.c_str());
}
}get_arithmetic_action_result 함수는 앞서 설정한 SendGoalOptions 의 result_callback 으로 앞서 설명했던 액션 서버의 execute_checker 함수와 연결되어 있다. WrappedResult 타입의 매개변수를 인자로 가지고 있어서 액션 결괏값을 확인할 수 있을 뿐만 아니라 액션 결과 상태에 따른 액션 클라이언트의 대응 로직을 쉽게 개발할 수 있다.
void Checker::get_arithmetic_action_result(
const GoalHandleArithmeticChecker::WrappedResult & result)
{
switch (result.code) {
case rclcpp_action::ResultCode::SUCCEEDED:
RCLCPP_INFO(this->get_logger(), "Action succeeded!");
RCLCPP_INFO(this->get_logger(), "Action result(all formula): ");
for (const auto & formula : result.result->all_formula) {
RCLCPP_INFO(this->get_logger(), "\t%s ", formula.c_str());
}
RCLCPP_INFO(this->get_logger(), "Action result(total sum): ");
RCLCPP_INFO(this->get_logger(), "\t%.2f ", result.result->total_sum);
break;
case rclcpp_action::ResultCode::ABORTED:
RCLCPP_WARN(this->get_logger(), "The action was aborted");
return;
case rclcpp_action::ResultCode::CANCELED:
RCLCPP_WARN(this->get_logger(), "The action was canceled");
return;
default:
RCLCPP_ERROR(this->get_logger(), "Unknown result code");
return;
}
rclcpp::shutdown();
}4. 액션 서버, 액션 클라이언트 복습
1) 액션 서버(요청에 응답하는 프로그램)
1) Node 설정
2) create_server 설정
3) goal, cancel, accepted 콜백 함수 설정
2) 액션 클라이언트(요청하는 프로그램)
1) Node 설정
2) create_client 설정
3) goal_response, feedback, result 콜백 함수 설정
5. 노드 실행 코드
위에서 실습한 코드를 실행하는 명령어는 다음과 같다.
$ ros2 run topic_service_action_rclcpp_example calculator$ ros2 run topic_service_action_rclcpp_example checker이 두개의 노드를 실행할 수 있도록 설정한 부분은 빌드 실행 파일(CMakeLists.txt)에서 확인할 수 있다.CMake의 add_executable 태그는 main 함수가 포함된 소스파일을 실행 가능하도록 만들어 주는 역할을 한다. 그 첫번째 인자에는 실행명을 적고, 다음 인자에는 main 함수가 포함된 소스파일을 적어준다. 필요하다면 그 다음 인자로 target이 되는 소스파일도 적어주어야 한다. 이를 통해 우리는 ros2 run 명령어를 통해 operator 와 checker 소스 파일을 실행할 수 있다.
add_executable(operator src/checker/checker.cpp)
add_executable(calculator src/calculator/main.cpp src/calculator/calculator.cpp)checker 노드의 main 함수를 보자. 이전 강좌에서 다뤘던 main 함수들과 다르게 실행 인자를 받아 Checker 클래스에 넘겨주는 코드가 있다. 해당 과정에 대한 설명은 추후 강좌에서 좀더 자세히 다뤄보겠다.
int main(int argc, char * argv[])
{
if (rcutils_cli_option_exist(argv, argv + argc, "-h")) {
print_help();
return 0;
}
rclcpp::init(argc, argv);
float goal_total_sum = 50.0;
char * cli_option = rcutils_cli_get_option(argv, argv + argc, "-g");
if (nullptr != cli_option) {
goal_total_sum = std::stof(cli_option);
}
printf("goal_total_sum : %2.f\n", goal_total_sum);
auto checker = std::make_shared<Checker>(goal_total_sum);
rclcpp::spin(checker);
rclcpp::shutdown();
return 0;
}지금까지 액션 프로그래밍에 대해 알아보았다. 다음시간에는 파라미터에 대해 알아보겠다.
