1. 파라미터
ROS2의 파라미터(Parameter)는 ROS1의 parameter server와 dynamic_reconfigure 패키지의 기능을 모두 가지고 있어 노드가 동작하는 동안 특정 값에 대한 저장, 변경, 회수가 가능하다. ROS2의 모든 노드는 파라미터 서버(Parameter Server)를 가지고 있어서 파라미터 클라이언트(Parameter Client)와 서비스 통신을 통해 파라미터에 접근할 수 있도록 구현되어 있다. 이는 서비스와 그 목적은 다르지만 데이터 처리 자체는 동일하다고 볼 수 있다. 서비스가 특정 태스크 수행을 위한 요청과 응답이라는 RPC(Remote Procedure Call)에 가까운 목적이었다면, 파라미터는 특정 매개변수를 노드 내부 또는 외부에서 쉽게 저장(Set)하거나 변경할 수 있고, 쉽게 회수(Set)하여 사용할 수 있게 하는 점에서 그 사용 목적이 다르다고 볼 수 있다.
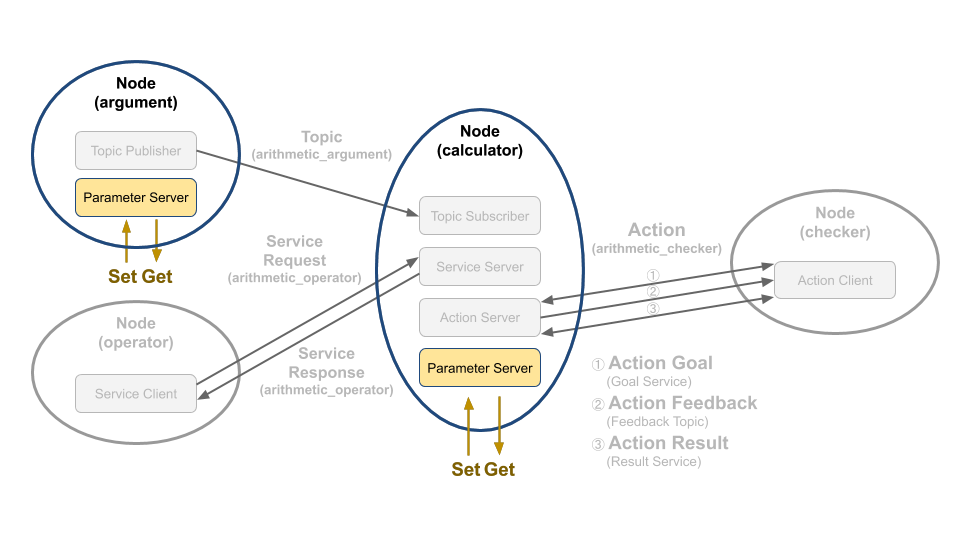
우리는 이전 장에서 토픽, 서비스, 액션 프로그래밍을 익히기 위하여 argument, operator, calculator, checker 노드를 작성해 보았다. 이들 노드 중에서 아래 그림과 같이 argument 노드와 calculator 노드는 파라미터를 사용하고 있다. argument 노드는 QoS 설정과 랜덤으로 생성되는 변수 a, b의 생성 범위를 파라미터 통해 설정할 수 있고, calculator 노드는 QoS 설정에 파라미터를 사용하였다. 우리는 여기서 argument 노드에서 사용되는 파라미터에 대해 자세히 알아볼 것이다.
2. 파라미터 서버와 초기화
모든 ROS2 노드는 자신의 파라미터 서버를 가지고 있다. 간단히 talker 노드를 동작시켜 이를 확인해 보자.
$ ros2 run demo_nodes_cpp talker
[INFO]: Publishing: 'Hello World: 1'
[INFO]: Publishing: 'Hello World: 2'talker 노드는 간단한 퍼블리시 예제 코드이다. 다음 명령어를 통해 등록된 토픽을 확인해 보자.
$ ros2 topic list
/chatter
/parameter_events
/rosout등록된 토픽은 총 세개 인데, 먼저 talker 노드에서 등록한 /chatter와 모든 노드의 로그를 확인할 수 있는 /rosout이 있다. 그리고 /parameter_events 토픽도 확인할 수 있는데, 이를 서브스크라이브하여 노드는 런타임에서 생성, 변경, 삭제되는 파라미터를 확인할 수 있다. 이제 다음 명령어를 통해 등록된 서비스도 한 번 확인해보자.
$ ros2 service list
/talker/describe_parameters
/talker/get_parameter_types
/talker/get_parameters
/talker/list_parameters
/talker/set_parameters
/talker/set_parameters_atomically등록된 서비스는 총 6개이다. talker 노드의 코드를 확인해보면 서비스 통신과 관련된 코드는 없는데 어디서 이러한 서비스가 등록된 걸까. 이는 Talker 클래스가 상속받은 rclcpp::Node 에서 생성한 서비스들로 이를 이용하여 다른 노드에서 talker 노드와 관련된 파라미터들에 접근할 수 있다.
파라미터 서버에 파라미터를 등록하는 방법은 크게 네가지 정도가 있다.
- yaml 포맷의 파일의 경로를 프로그램 실행 인자로 rclcpp::Node에 전달
- ros2cli 를 이용한 파라미터 등록
- rclcpp::Node의 declare.set 파라미터 함수 사용
- 파라미터 클라이언트 API를 이용
이번 장에서는 사용자들이 가장 많이 사용하는 1번 방법을 알아 보겠다. 먼저 yaml 포맷의 파일을 보자.
/**: # namespace and node name
ros__parameters:
qos_depth: 30
min_random_num: 0.0
max_random_num: 9.0첫 번째 줄의 표식(/**:) 은 namespace와 node name과 관계없이 파라미터 이름과 초깃값을 설정하겠다는 것이다. 만약 namespace와 node name에 따라 설정을 다르게 하고 싶다면, 다음과 같이 적어주면 된다.
/namespace:
/node_name:
ros__parameters:
foo: 30
bar: 0.0두 번째 줄에는 ros__parameters: 태크를 작성해야만 그 아래 설정된 값들을 ROS 파라미터로 등록시킬 수 있다. 파라미터로 등록할 수 있는 타입으로는 bool, int, double, string, array 등이 있다.
설정이 끝난 파라미터 파일은 보통 Launch 파일에 포함시켜 노드를 실행시킬 때 불러올 수 있도록 한다. 런치 파일과 관련된 내용은 다음 장에서 설명하겠다. 다음 param_dir을 통해 파라미터 파일의 경로를 불러오는 것만 확인해 보자.
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
param_dir = LaunchConfiguration(
'param_dir',
default=os.path.join(
get_package_share_directory('topic_service_action_rclcpp_example'),
'param',
'arithmetic_config.yaml'))
return LaunchDescription([
DeclareLaunchArgument(
'param_dir',
default_value=param_dir,
description='Full path of parameter file'),
Node(
package='topic_service_action_rclcpp_example',
executable='argument',
name='argument',
parameters=[param_dir],
output='screen'),
Node(
package='topic_service_action_rclcpp_example',
executable='calculator',
name='calculator',
parameters=[param_dir],
output='screen'),
])런치 파일과 파라미터 파일은 CMakeLists.txt 파일에서 저장 경로를 꼭 지정하여야만 제대로 불러올 수 있다.
# 중략
install(DIRECTORY launch param
DESTINATION share/${PROJECT_NAME}
)
# 중략이제 Launch 파일이 실행되면 위에서 설정한 파라미터 값들이 파라미터 서버에 등록됐다는 것을 확인할 수 있다.
$ ros2 launch topic_service_action_rclcpp_example arithmetic.launch.py$ ros2 param list
/argument:
max_random_num
min_random_num
qos_depth
use_sim_time
/calculator:
qos_depth
use_sim_time$ ros2 param get /argument max_random_num
Double value is: 9.03. 파라미터 클라이언트
파라미터 클라이언트가 포함된 argument 노드의 소스코드는 이미 토픽 프로그래밍에서 자세히 다뤘다. 이번 장에서는 파라미터와 관련된 코드만 알아보자.
// 중략
class Argument : public rclcpp::Node
{
public:
using ArithmeticArgument = msg_srv_action_interface_example::msg::ArithmeticArgument;
explicit Argument(const rclcpp::NodeOptions & node_options = rclcpp::NodeOptions());
virtual ~Argument();
private:
void publish_random_arithmetic_arguments();
void update_parameter();
float min_random_num_;
float max_random_num_;
rclcpp::Publisher<ArithmeticArgument>::SharedPtr arithmetic_argument_publisher_;
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Subscription<rcl_interfaces::msg::ParameterEvent>::SharedPtr parameter_event_sub_;
rclcpp::AsyncParametersClient::SharedPtr parameters_client_;
};
#endif // ARITHMETIC__ARGUMENT_HPP_// 중략
Argument::Argument(const rclcpp::NodeOptions & node_options)
: Node("argument", node_options),
min_random_num_(0.0),
max_random_num_(0.0)
{
this->declare_parameter("qos_depth", 10);
int8_t qos_depth = this->get_parameter("qos_depth").get_value<int8_t>();
this->declare_parameter("min_random_num", 0.0);
min_random_num_ = this->get_parameter("min_random_num").get_value<float>();
this->declare_parameter("max_random_num", 9.0);
max_random_num_ = this->get_parameter("max_random_num").get_value<float>();
this->update_parameter();
const auto QOS_RKL10V =
rclcpp::QoS(rclcpp::KeepLast(qos_depth)).reliable().durability_volatile();
arithmetic_argument_publisher_ =
this->create_publisher<ArithmeticArgument>("arithmetic_argument", QOS_RKL10V);
timer_ =
this->create_wall_timer(1s, std::bind(&Argument::publish_random_arithmetic_arguments, this));
}
// 중략
void Argument::update_parameter()
{
parameters_client_ = std::make_shared<rclcpp::AsyncParametersClient>(this);
while (!parameters_client_->wait_for_service(1s)) {
if (!rclcpp::ok()) {
RCLCPP_ERROR(this->get_logger(), "Interrupted while waiting for the service. Exiting.");
return;
}
RCLCPP_INFO(this->get_logger(), "service not available, waiting again...");
}
auto param_event_callback =
[this](const rcl_interfaces::msg::ParameterEvent::SharedPtr event) -> void
{
for (auto & changed_parameter : event->changed_parameters) {
if (changed_parameter.name == "min_random_num") {
auto value = rclcpp::Parameter::from_parameter_msg(changed_parameter).as_double();
min_random_num_ = value;
} else if (changed_parameter.name == "max_random_num") {
auto value = rclcpp::Parameter::from_parameter_msg(changed_parameter).as_double();
max_random_num_ = value;
}
}
};
parameter_event_sub_ = parameters_client_->on_parameter_event(param_event_callback);
}Argument 클래스는 rclcpp::Node 를 상속받는다. 해당 클래스의 멤버 변수를 살펴보면 ParameterEvent 타입으로 선언된 토픽 서브스크라이버와 AsyncParametersClient 클래스의 스마트 포인터를 확인할 수 있다.
rclcpp::Subscription<rcl_interfaces::msg::ParameterEvent>::SharedPtr parameter_event_sub_;
rclcpp::AsyncParametersClient::SharedPtr parameters_client_;Argument 클래스의 생성자를 보자. 해당 노드에서 사용할 파라미터를 선언하기 위해 declare_parameter 함수를 사용하여 먼저 파라미터 이름과 초깃값을 인자로 넣어주자. 그리고 get_parameter 함수를 통해 선언한 파라미터의 값을 회수할 수 있다.
this->declare_parameter("qos_depth", 10);
int8_t qos_depth = this->get_parameter("qos_depth").get_value<int8_t>();
this->declare_parameter("min_random_num", 0.0);
min_random_num_ = this->get_parameter("min_random_num").get_value<float>();
this->declare_parameter("max_random_num", 9.0);
max_random_num_ = this->get_parameter("max_random_num").get_value<float>();
this->update_parameter();update_parameter 함수에서는 AsyncParametersClient를 this 포인터로 초기화한다. 그리고 런타임에서 파라미터 서버에 이벤트(등록, 변경, 삭제)가 있을 때 콜백되는 함수를 등록할 수 있고, 이를 통해 파라미터가 변경되었을 때를 확인할 수 있다.
void Argument::update_parameter()
{
parameters_client_ = std::make_shared<rclcpp::AsyncParametersClient>(this);
while (!parameters_client_->wait_for_service(1s)) {
if (!rclcpp::ok()) {
RCLCPP_ERROR(this->get_logger(), "Interrupted while waiting for the service. Exiting.");
return;
}
RCLCPP_INFO(this->get_logger(), "service not available, waiting again...");
}
auto param_event_callback =
[this](const rcl_interfaces::msg::ParameterEvent::SharedPtr event) -> void
{
for (auto & changed_parameter : event->changed_parameters) {
if (changed_parameter.name == "min_random_num") {
auto value = rclcpp::Parameter::from_parameter_msg(changed_parameter).as_double();
min_random_num_ = value;
} else if (changed_parameter.name == "max_random_num") {
auto value = rclcpp::Parameter::from_parameter_msg(changed_parameter).as_double();
max_random_num_ = value;
}
}
};
parameter_event_sub_ = parameters_client_->on_parameter_event(param_event_callback);
}다음 명령어를 통해 파라미터 이벤트가 동작되는 방식을 확인해 보자. 먼저 기존의 런치 파일을 실행시키면 argument가 0.0~10.0 사이의 랜덤한 실수가 나오는 것을 확인할 수 있다. 파라미터 CLI를 통해 숫자의 범위를 바꿔주면 다음과 같이 런타임에서 변화가 생기는 것을 확인할 수 있다.
$ ros2 launch topic_service_action_rclcpp_example arithmetic.launch.py
[calculator-2] [INFO]: Subscribed at: sec 1610853901 nanosec 99239646
[calculator-2] [INFO]: Subscribed argument a : 6.21
[calculator-2] [INFO]: Subscribed argument b : 0.23
[argument-1] [INFO]: Published argument_a 6.66
[argument-1] [INFO]: Published argument_b 1.32
[calculator-2] [INFO]: Subscribed at: sec 1610853902 nanosec 99293140
[calculator-2] [INFO]: Subscribed argument a : 6.66
[calculator-2] [INFO]: Subscribed argument b : 1.32
[argument-1] [INFO]: Published argument_a 15.67
[argument-1] [INFO]: Published argument_b 9.11
[calculator-2] [INFO]: Subscribed at: sec 1610853903 nanosec 99297804
[calculator-2] [INFO]: Subscribed argument a : 15.67
[calculator-2] [INFO]: Subscribed argument b : 9.11$ ros2 param set /argument max_random_num 20.0
Set parameter successfulROS2 파라미터 프로그래밍에 대해 알아보았다. 다음 장에서는 실행 인자 프로그래밍 코드를 분석해보겠다.
