1. 핵심 내용
○ 회전의 수학, 쿼터니언(Quaternion)
- 유니티 인스펙터 창에서 나오는 회전은 Vector3로 표현되고,
이런 방법을 오일러각(Euler Angle)이라고 함.
하지만, 시중의 많은 3D 소프트웨어는 내부적으로 쿼터니언을 사용함 - 쿼터니언을 사용할 시 짐벌 락(Gimbal Lock) 문제를 피할 수 있음.
- 짐벌 락(Gimbal Lock) : 극단적인 각도로 회전할 경우 한 축으로의 회전을 잃어버리는 것
- 수학적으로는 4차원 복소수를 이용한 회전 표현 방법.
(x, y, z, w) 형태로 표현함
!! 그렇다고 직접 x, y, z, w 값을 조정할 생각은 하면 안 됨 - 직접 값을 변경하거나 계산하는 대신, Unity의 내장 함수를 사용하는 것이 좋음.
(예: Quaternion.Euler, Quaternion.LookRotation, Quaternion.Slerp 등) - 쿼터니언은 애초에 직관적인 수체계를 사용하지 않음. 직접 값을 적용하려면, Quaternion.Identity (회전이 없는 상태를 나타내는 쿼터니언)만 사용해야 함
○ 쿼터니언과 함께 사용하는 주요 메소드
- Quaternion.Euler : 오일러각을 쿼터니언으로 변경할 수 있음 (Quaternion.Euler(0f, 0f, 90f) → Quaternion으로 변환)
- Quaternion.LookRotation : 머리를 회전하는 것처럼, 앞과 위를 특정한 방향으로 하는 회전 쿼터니언을 만듬
- Quaternion.Slerp : 쿼터니언과 다른 쿼터니언 사이에 내분점을 알 수 있음. 구형 보간(Spherical Linear Interpolation)기법을 활용해서 쿼터니언에 쓰면 더 정확
(두 쿼터니언 Q1, Q2가 있을 때 30% 지점은 어디일까? 이런 문제를 풀 때 유용)
○ 삼각함수 기초
- 삼각함수 기초
- 삼각함수는 각도를 통해 삼각형들의 각 변의 비율을 알아낼 수 있는 함수
- 기본적인 삼각함수로 사인(sin), 코사인(cos), 탄젠트(tan)이 있음
- 사인, 코사인, 탄젠트의 정의
- sin = 높이/빗변 = b/a
- cos = 밑변/빗변 = c/a
- tan = 높이/밑변 = b/c
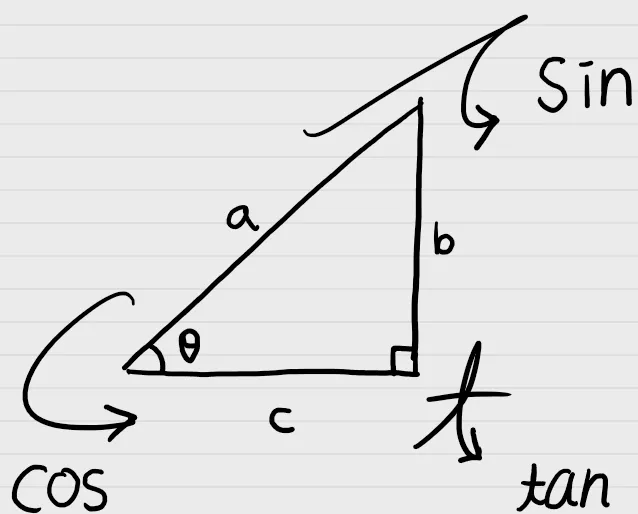
- 요약 : 삼각함수는 비율을 알기 위해 각도 비율을 구하는 함수, 탄젠트(tan)는 그중에서도 밑변과 높이의 비율
○ 아크탄젠트 (ArcTangent)
-
각도 -> 비율, 삼각함수는 각도를 알면 비율을 알 수 있음.
좌표 -> 각도, 이번에 하고 싶은것은 좌표를 알면 각도가 몇도인지 알 고 싶음.
비율 -> 각도, 아크 탄젠트는 비율을 알면 각도를 알 수 있음 -
삼각함수에서 아크(arc)-가 붙으면 삼각함수의 역함수인 역삼각함수를 말함.
각도->비율이었던게 비율->각도 가 됨👍
즉, 아크탄젠트 함수는 삼각함수인 탄젠트의 역함수. 가로와 세로의 비에 따른 각도를 계산하는 데 사용 -
2D에서 점 또는 벡터에 대한 각도를 찾는 데 아크탄젠트 함수가 종종 사용됨
-
비율말고도 x, y자체가 양수인지 음수인지를 통해 360도를 다 구분해낼 수 있게 함
- 원래는 x, y가 같은 부호이지만 둘다 양수, 둘다 음수이거나 x, y가 다른 부호이지만 x가 음수이거나 y가 음수인 상황 때문에 아크탄젠트로는 180도 각도 범위에서만 알아낼 수 있음
-
이러한 구현을 개발자들은 Atan2라고 이름 붙이고, 밑변 / 높이였던 탄젠트의 기본 개념을 적용해 y, x순으로 인수를 넣음
-
이를 통해 점 (x, y)에서, Math.Atan2(y, x) 함수를 사용하여 벡터가 x축과 이루는 각도를 까지의 값으로 얻을 수 있음
(각도를 가 180도가 되도록 표현하는 방법을 호도법, 그리고 그 단위를 라디안이라고 부릅니다.) -
Mathf.Rad2Deg = 180 / 3.14 가 이미 계산되어있음😥
-
Atan2를 활용해서 객체가 특정 방향을 향하도록 만들거나 두 점 사이의 각도를 계산할 때 유용함
- 요약 : Atan2는 각도를 알기 위해 y와 x의 비율을 통해 각을 알아내는 함수이고, 범위에서 결과가 나옴
2. 마우스를 따라 회전하는 무기 만들기
○ 오브젝트 준비하기

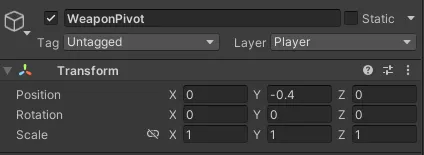
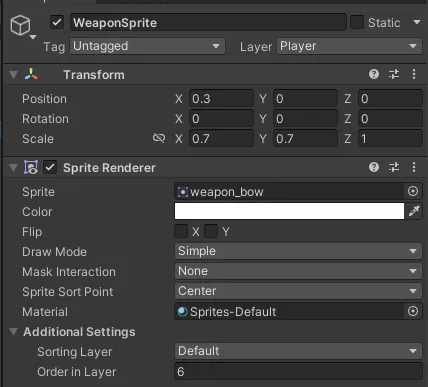
○ TopDownAimRotation 만들기
- TopDownController OnLookEvent에 등록할 메소드를 구현
- 🤷♂️그럼 등록이 안되었는데 지금까지 오류가 안난 이유
Action.Invoke()는 delegate가 비어있을 때는 별도의 호출을 하지 않는다는 의미.
지금까지는 등록되어 있는 메소드가 없었기 때문에 무시하고 지나가게 됨.
- 🤷♂️그럼 등록이 안되었는데 지금까지 오류가 안난 이유
- 아크 탄젠트를 이용해 각도를 구함
public class TopDownAimRotation : MonoBehaviour
{
[SerializeField] private SpriteRenderer armRenderer;
[SerializeField] private Transform armPivot;
[SerializeField] private SpriteRenderer characterRenderer;
private TopDownController controller;
private void Awake()
{
controller = GetComponent<TopDownController>();
}
private void Start()
{
// 마우스의 위치가 들어오는 OnLookEvent에 등록하는 것
// 마우스의 위치를 받아서 팔을 돌리는 데 활용할 것임.
controller.OnLookEvent += OnAim;
}
private void OnAim(Vector2 direction)
{
// OnLook
RotateArm(direction);
}
private void RotateArm(Vector2 direction)
{
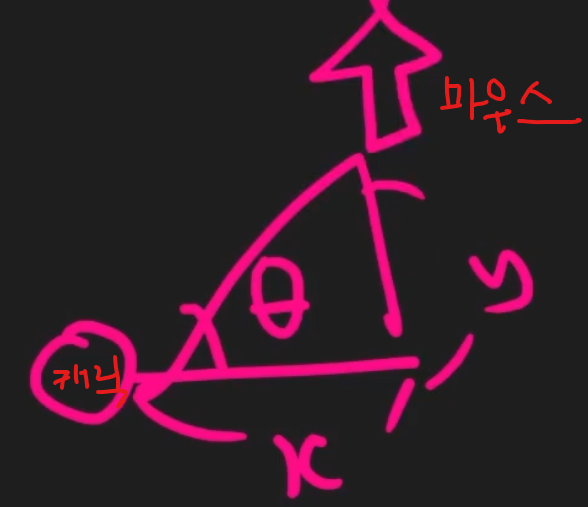
// Atan2는 직각삼각형이 있다고 할 때 세로가 y, 가로가 x일 때 그 각도를 라디안 [-Pi,Pi]로 나타내는 함수임
// 라디안의 -Pi는 -180도, Pi는 180도 이므로 Mathf.Rad2Deg는 약 57.29임 (180 / 3.14)
float rotZ = Mathf.Atan2(direction.y, direction.x) * Mathf.Rad2Deg;
// 오일러에 넣어야 하므로 디그리로 변경해야 함
// Atan2이므로 매개변수는 y x 순이어야함
// 캐릭터에서 마우스를 바라보는 각도를 얻음
// 좌표(y, x) -> 라디안 -> 각도
// [1. 캐릭터 뒤집기]
// 이때 각도는 오른쪽(1,0 방향)이 0도이므로,
// -90~90도에서는 오른쪽을 바라보는 게 맞지만, -90도 미만 90도 초과라면 왼쪽을 바라보는 것임.
characterRenderer.flipX = Mathf.Abs(rotZ) > 90f;
// 절대값이 90도 보다 크면 플립
// 왼쪽 구간에 있으면 뒤집어라
// [2. 팔 돌리기]
// 팔을 돌릴 때는 나온 각도를 그대로 적용하는데, 이때 유니티 내부에서 사용하는 쿼터니언으로 변환한다.
// 쿼터니으로 변형하는 방법 두 가지
// 1) Vector3를 Quaternion으로 변환해서 넣는 방법
// Quaternion.Euler(x 회전, y 회전, z 회전) : 오일러 각 기준으로 값을 넣으면 쿼터니언으로 변환됨
// 2) eulerAngles를 통해 자동으로 변환되게 하는 방법 - rotation이랑 비슷하게 변환이 되어서 들어간다고 생각하면 됩니다.
// Transform.eulerAngles을 변경
armPivot.rotation = Quaternion.Euler(0, 0, rotZ); // z축으로 회전해야함
// (2번 방법으로 하면) armPivot.eulerAngles = new Vector3(0, 0, rotZ);
// Quaternion.Euler를 이용해 각도를 지정해줌
}
}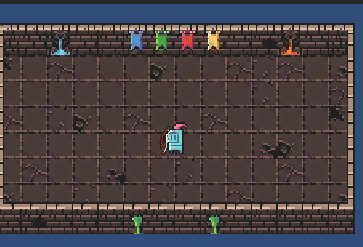
마우스 방향을 따라 플립과 활 방향 전환이 된다
