Step 1) mavros 설치
1) $ sudo apt-get update
2) $ sudo apt-get install ros-melodic-mavros ros-melodic-mavros-extras
Step 2) PX4 설치
https://docs.px4.io/main/en/dev_setup/building_px4.html
.
1) $ git clone https://github.com/PX4/PX4-Autopilot.git —recursive

2) $ bash ./PX4 Autopilot/Tools/setup/ubuntu.sh
3) $ cd PX4-Autopilot
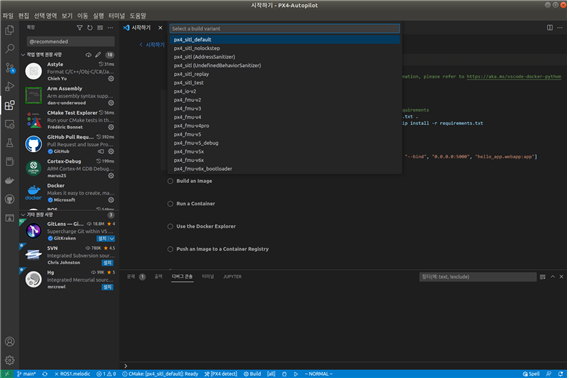
4) $ make px4_sitl jmavsim
++
Step 3) PX4 SourceCode Download
1) $ cd catkin_make
2) $ git clone https://github.com/PX4/Firmware.git Firmware
3) $ cd Firmware
4) $ git checkout
5) $ git submodule update —init --recursive
6) $ bash ./Tools/setup/ubuntu.sh
1) $ sudo apt-get install chrony
2) $ sudo ntpdate ntp.ubuntu.com
3) $sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu trusty main"> /etc/apt/sources.list.d/ros-latest.list’
4) $ sudo apt-get update
5) $ sudo apt-get upgrade
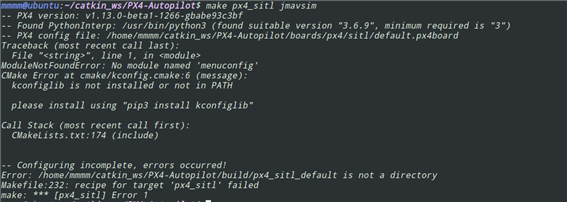
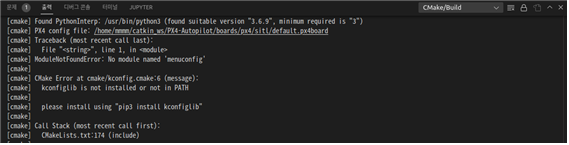
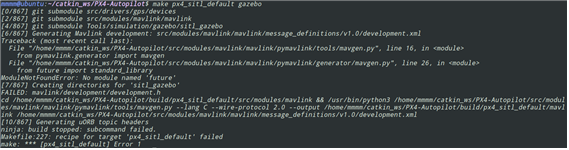
6) $ make px4_sitl_default gazebo
6-1) $ pip3 install kconfiglib

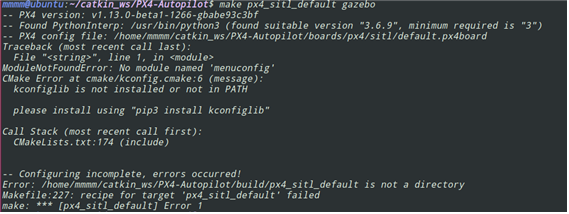
다시 6) $ make px4_sitl_default gazebo
실행이 잘 되나 싶었는데 ‘em’ 모듈이 없다고 나왔다.
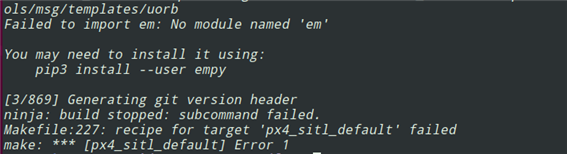
6-2) $ pip3 install —user empy

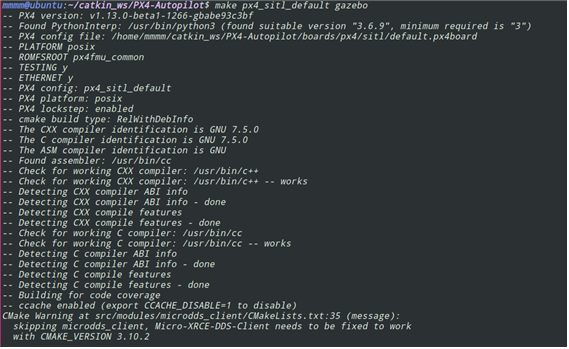
다시 6) $ make px4_sitl_default gazebo
- 에러 메시지가 달라지기는 했당 !!
6-3) $ pip3 install future

다시 6) $ make px4_sitl_default gazebo
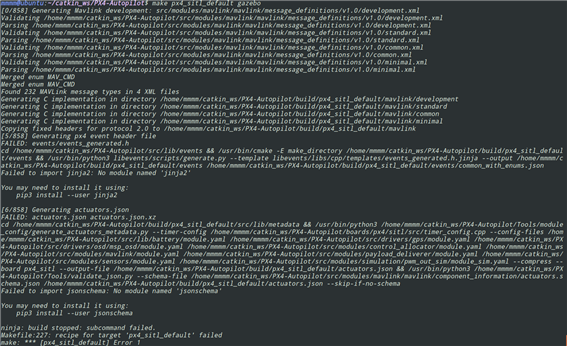
6-4) $ pip3 install —user jinja2

6-5) $ pip3 install --user jsonschema
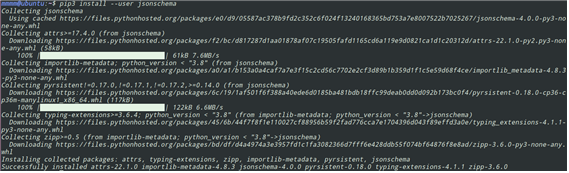
다시 6) $ make px4_sitl_default gazebo

6-6) $ pip3 install numpy


이제 된다.
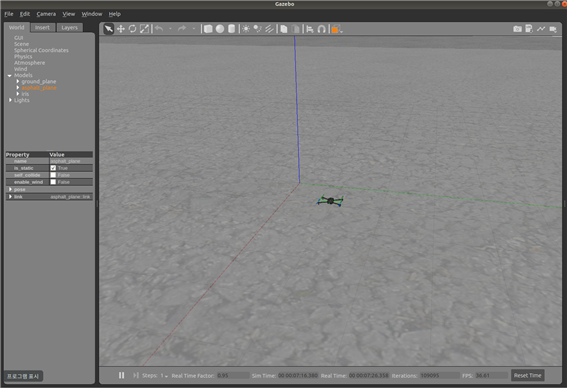
“ commander takeoff ”
공중으로 가져오는 명령어를 실행했는데 에런 에러가 떳다.
7) $ sudo apt install pxz
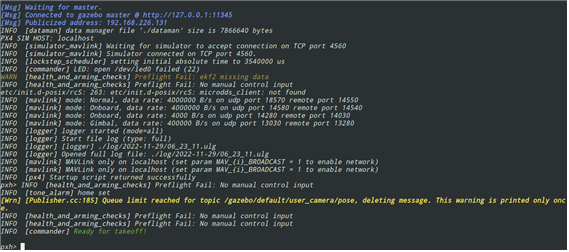
작동 후 Enter를 눌러 pxh가 뜬다면
“ commander takeoff ”를 입력하면
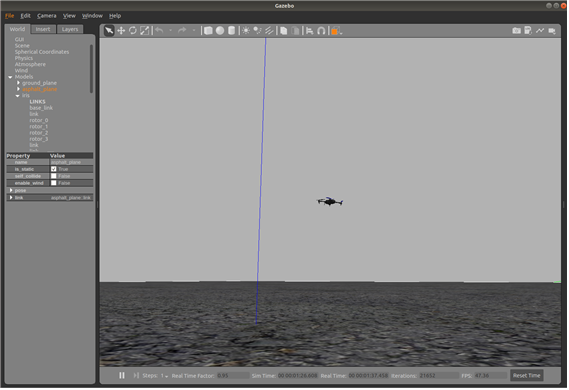
=> 이렇게 이륙하는 것을 확인할 수 있다.
+++*+
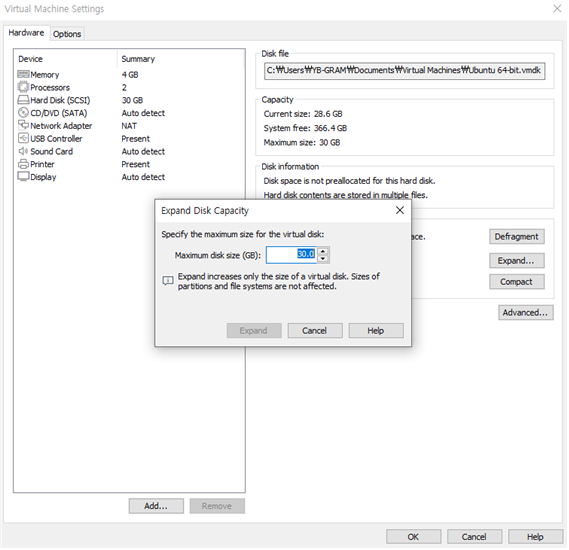
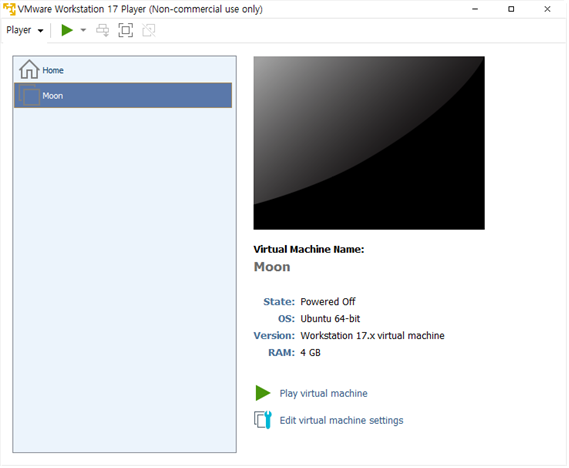
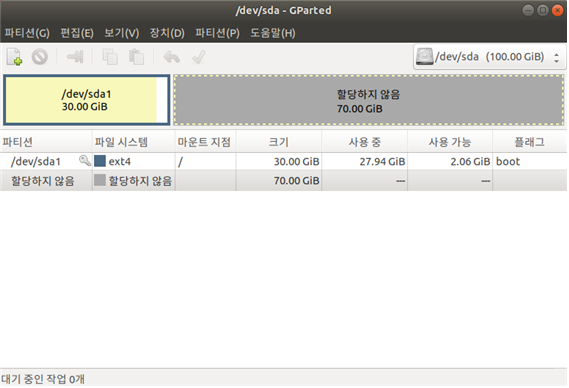
저장공간을 30GB로 잡았는데 Ros를 설치하고 시뮬레이션을 돌리다 보니, 용량이 부족하여 용량을 수정해주어야 한다.
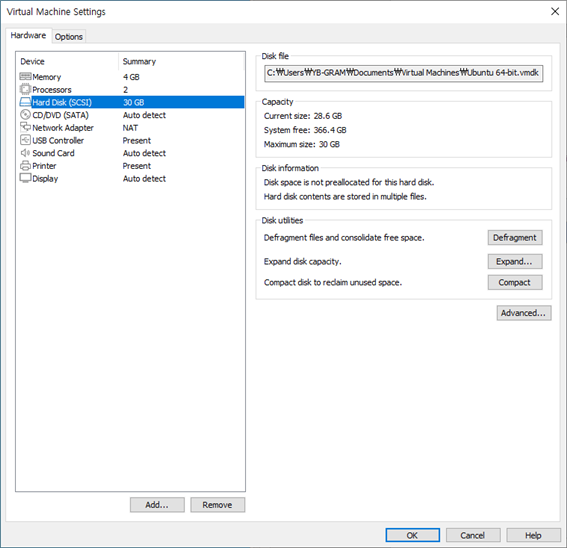
“ Disk Utilties” 탭에 ’Expand disk capacity’를 클릭한다.
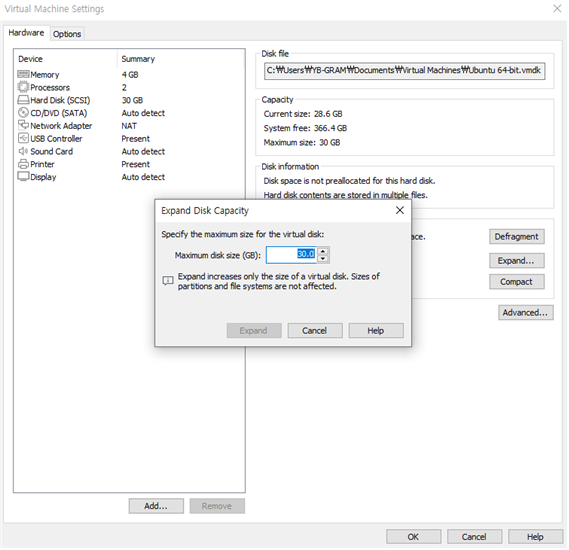
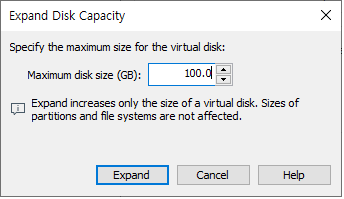
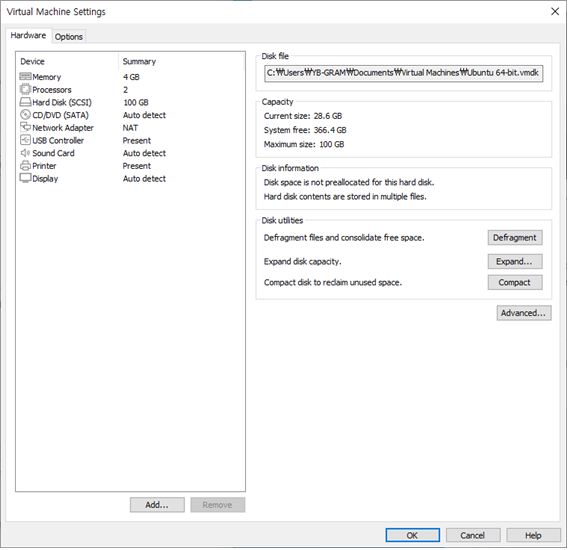
~> 30G가 100G로 변경된걸 볼 수 있다.
하지만 ubuntu 디스크 크기가 변경되지 않았다.
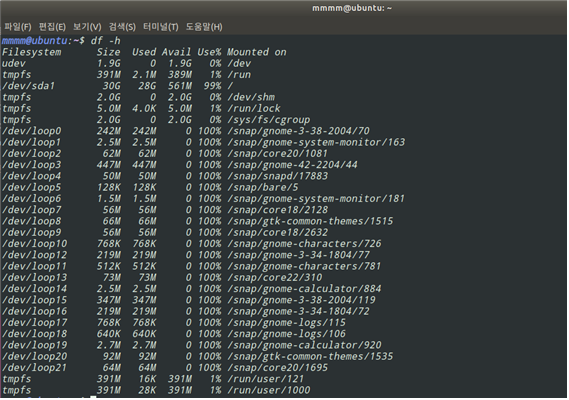
다음 명령어로는
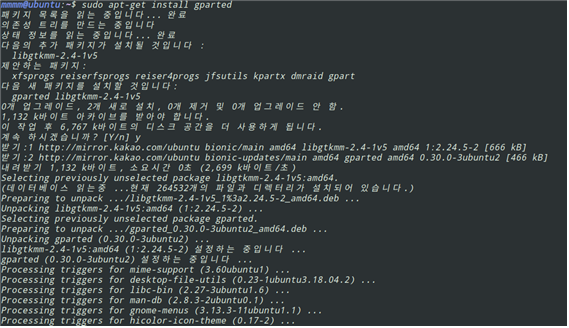
$ sudo gparted

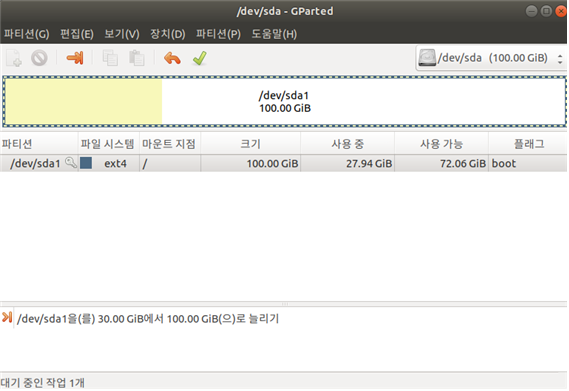
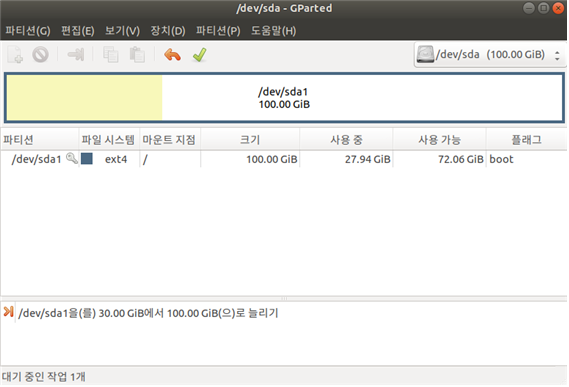
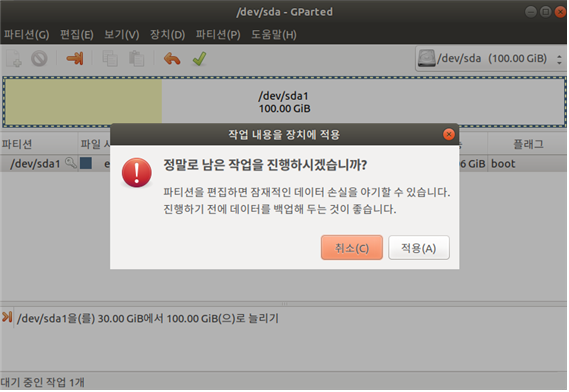
-> 체크 버튼을 누른 후 적용해준다.
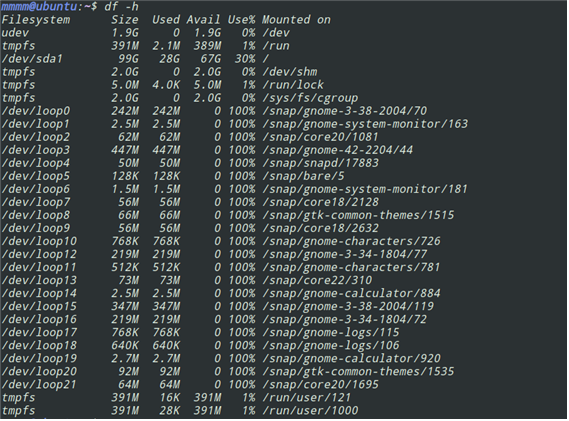
-> 다시 확인해보면 디스크 용량이 늘어난 것을 볼 수가 있다.
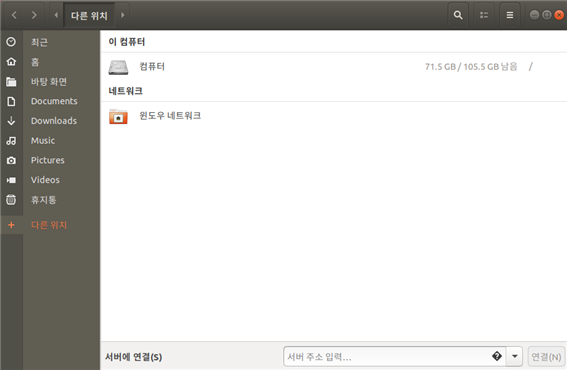
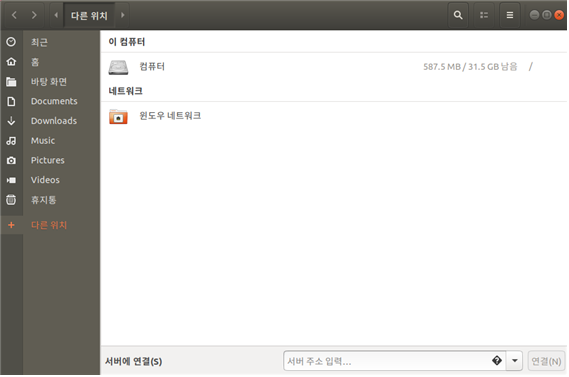
파일을 열어 다시 한번 확인 해주면 확실하게 바뀐 것을 확인할 수가 있었다.
++ 진행 사항 중 참고 ++