Dynamic Test
static test에 해당되는 stress relaxation test와 creep test를 통해 relaxation modulus, G(t)와 creep compliance, J(t)를 구할 수 있었다. static test는 t>0에서 system에 가하는 stimulation을 unit-step function으로 준다. 실험에서 현실적으로 완벽한 unit-step function으로 구하기엔 어렵다. 하지만 우리는 sinusodial한 stimulation을 만들기는 쉽다. 즉, unit-step function이 아닌 sinusodial function을 system의 impulse function으로 가하는 실험을 dynamic test라고 한다.
Dynamic Moduli
strain을 γ(t)=γ0sinωt로 두자. 여기서 γ0는 strain amplitude이고, ω는 주파수에 해당한다. 그럼 BSP에 의해 σ(t)는 다음과 같다.
σ(t)=γ0ω∫−∞tG(t−τ)cosωτdτ
여기서 ξ≡t−τ로 치환하여 다시 쓰면,
σ(t)=G′ωγ(t)+η′γ˙(t)
where γ˙(t)=dγ/dt, and
G′(ω)≡ω∫0∞G(t)sinωtdt;η′≡∫0∞G(t)cosωtdt
만약, G′=0이면, σ(t)=η′γ˙(t)가 되고 이 식은 viscous fluid의 구성방정식이 된다. 또한 η′=0이면, σ(t)=G′(ω)γ(t)가 되고 이 식은 elastic solid가 된다. elastic solid는 에너지를 저장하고(탄성), viscous fluid는 역학적 에너지를 방출한다(점성). 그러므로 G′(ω)는 storage modulus, G′′(ω)은 loss modulus로 정의한다. G′′(ω)은 다음과 같이 정의할 수 있다.
G′′(ω)=ωη′(ω)=ω∫0∞G(t)cosωtdt
그리고 storage modulus와 loss modulus를 dynamic moduli라고 부른다.
Linearity Check
앞에서 stress relaxation test에서도 linearity check 실험을 amplitude sweep test를 통해 선형 응답 조건을 만족하는 γmax를 찾았었다. dynamic test에서도 선형 응답 조건을 만족하는지 확인해야한다. dynamic test는 strain뿐만 아니라 주파수, ω도 상수로 주어진다. 즉, γ0가 선형 영역에 있을 때, 동일한 주파수 ω에 대해 dynamic moduli는 동일해야 한다.
하지만 아래의 plot을 살펴보자.
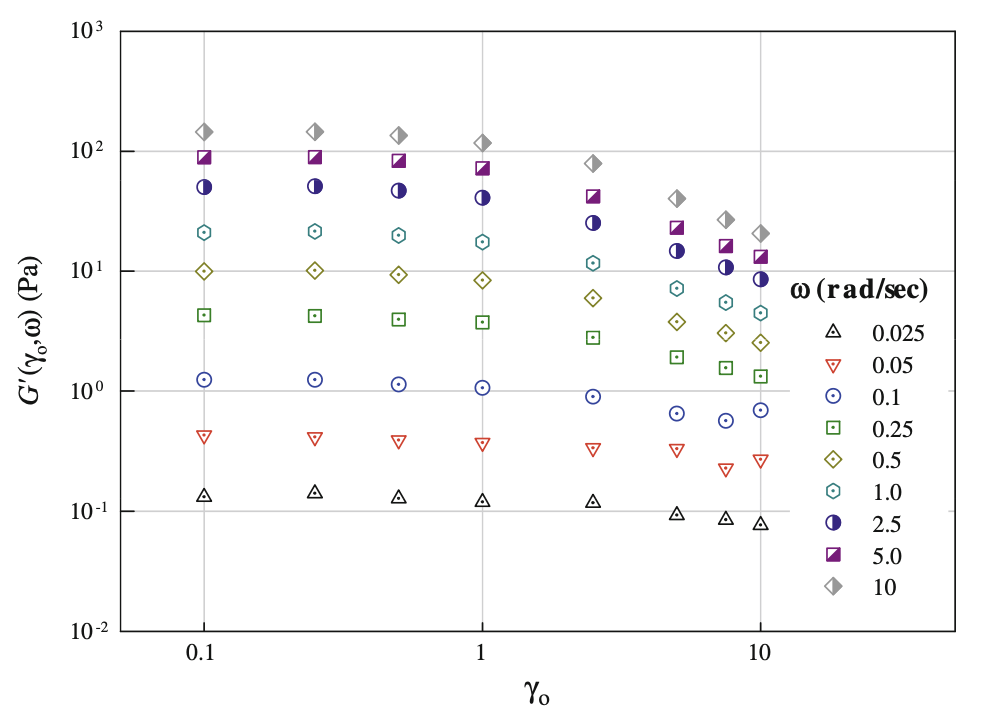
ω에 대한 dynamic moduli를 plot하지 않고, γ0에 대해 dynamic moduli를 plot한 결과를 보면, ω 가 커질수록 선형성의 편차가 커진다는 사실을 확인할 수 있다. 즉, γmax는 ω에 따라 달라진다.
그러므로 strain-controlled rheometer로 선형성 체크를 ωmin≤ω≤ωmax에서 확인하기 위해 적어도 ωmin, ωmax에서 2번의 amplitude sweep test를 통해 γmax의 최소값을 골라야한다.
Complex Notation
모든 측정 가능한 양은 실수이다. 하지만 복소수를 사용하면 dynamic test의 결과를 알아보기 더 쉬워진다. complex strain을 γ∗=γ0exp(iωt)라 하자. 그럼 γ∗/dt=iωγ∗(t)임을 알 수 있다. 이를 이용하여 BSP에 의해 complex stress를 구해보면 다음과 같다.
σ∗(t)Letξ=iωγ0∫−∞tG(t−τ)eiωτdτ≡t−τ=iωγ0∫0∞G(ξ)eiω(t−ξ)dτ=γ0eiωtiω∫0∞G(ξ)e−iωξdτ=G∗(ω)γ∗(t)
그러면 G∗(ω)는 다음과 같다.
G∗(ω)≡iω∫0∞G(t)e−iωtdt=iω∫0∞G(t)(cosωt−isinωt)dt=iω∫0∞G(t)cosωtdt+ω∫0∞G(t)sinωtdt=G′(ω)+iG′′(ω)
G∗(ω)의 정의를 다시 보면 이는 라플라스 변환(laplace transform)의 형태와 동일하다는 것을 알 수 있다.
G∗(ω)=[sG~(s)]s=iω
그리고 complex stress, σ∗(t)를 통해 다음과 같이 유도할 수 있다.
σ∗(t)=iωG∗(ω)(iωγ∗(t))=iωG∗(ω)dtdγ∗=η∗(ω)dtdγ∗
complex viscosity를 다음과 같이 정의할 수 있다.
η∗(ω)≡iωG∗(ω)
전개하면 다음과 같은 dynamic moduli와 complex viscosity의 관계식을 얻을 수 있다.
η∗(ω)η′(ω)=iωG′(ω)+iG′′(ω)=η′′(ω)−iη′(ω)≡ωG′′(ω);η′′(ω)≡ωG′(ω)
또한 다음과 같은 결론을 얻을 수 있다.
η∗(ω)=G~(iω)
G(t)에 퓨리에 변환(Fourier Transform)을 하면 다음과 같이 유도할 수 있다. 퓨리에 변환은 F[G(t)]=G^(ω)으로 표시하자.
G^(ω)=∫−∞∞G(t)e−iωtdt=∫0∞G(t)e−iωtdt=G~(iω)=η∗(ω)
모든 실수 함수(real function)는 다음과 같이 표현할 수 있다.
f(t)=feven(t)+fodd(t);{feven(t)=2f(t)+f(−t)fodd(t)=2f(t)−f(−t)
even function의 퓨리에 변환은 다음과 같다.
f^even(ω)=∫−∞∞feven(t)[cosωt−isinωt]dt=∫−∞∞feven(t)cosωtdt=2∫0∞feven(t)cosωtdt
odd function의 퓨리에 변환은 다음과 같다.
f^odd(ω)=∫−∞∞feven(t)[cosωt−isinωt]dt=−i∫−∞∞fodd(t)sinωtdt=−2i∫0∞fodd(t)sinωtdt
그러므로 모든 실수 함수에 대해서 퓨리에 변환은 다음과 같다.
f^(ω)f^even(ω)=f^even(ω)+f^odd(ω)=2∫0∞feven(t)cosωtdt−2i∫0∞fodd(t)sinωtdt=2∫0∞feven(t)cosωtdt;f^odd(ω)=−2i∫0∞fodd(t)sinωtd
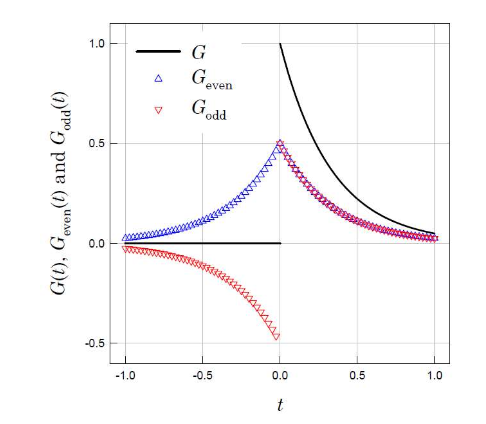
G(t)를 위와 같이 even function과 odd function으로 나누어 정의하자. 그럼 t>0에서 다음이 성립한다.
Geven(t)=Godd(t)=21G(t)
그러므로 G(t)의 퓨리에 변환은 다음과 같다.
G^(ω)G^(ω)=η∗(ω)=2∫0∞Geven(t)cosωtdt−2i∫0∞Godd(t)sinωtdt=η′′(ω)−iη′(ω)=ωG′(ω)−iωG′′(ω)
퓨리에 변환의 정의에 의해 역 퓨리에 변환(inverse fourier transform)은 다음과 같다.
f(t)=2π1∫−∞∞f^(ω)eiωtdω
그럼 다음과 같이 유도할 수 있다.
ωG′′(ω)Geven(t)G(t)=G^even(ω)=2∫0∞Geven(t)cosωtdt=2π1∫0∞ωG′′(ω)eiωtdω=π1∫0∞ωG′′(ω)cosωtdω=π2∫0∞ωG′′(ω)cosωtdω
마찬가지로 ωG′(ω)에 대해서도 구해보면,
G(t)=π2∫0∞ωG′(ω)sinωtdω
최종적으로 우리는 dynamic test로 구한 dynamic moduli, G′,G′′으로 static test로 구하는 relaxation modulus, G(t)를 구할 수 있다. 즉 static test에서 unit-step function의 완벽 재현에 어려움으로 짧은 시간 범위에서 정확한 G(t)를 구할 수 없었지만, dynamic test의 결과와 퓨리에 변환을 적절히 사용하여 정확한 G(t)를 구할 수 있다!
Terminal Behavior
dynamic test에서 주파수가 매우 낮다면, 우리는 다음과 같은 근사를 할 수 있다.
sinωt≈ωt;cosωt≈1
그럼 dynamic moduli는 다음과 같이 근사된다.
G′(ω)≈ω2∫0∞tG(t)dt;G′′(ω)≈ω∫0∞G(t)dt
낮은 주파수 영역에서 zero-shear viscoisty, mean relaxation time, steady state compiance를 다음과 같이 새로 정의하자.
η0λˉJe0≡∫0∞G(t)dt≡η01∫0∞tG(t)dt≡η0λˉ
이제 Je0와 η0를 구해보자.
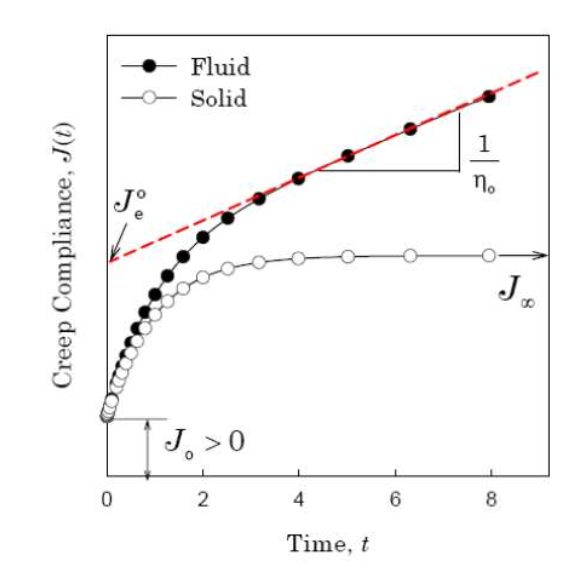
creep test의 실험 결과에서 빨간색 직선을 일차함수로 근사해보자.
J(t)≈at+b
빨간색 직선의 기울기가 왜 1/η0이고 y절편이 Je0인지 다음의 유도를 통해 알 수 있다.
J~(s)sG~(s)G∗(ω)G∗(ω)AtωG′(ω)≈L[at+b]=s2a+sb=s2bs+a=sJ~(s)1=bs+as=[sG~(s)]s=iω=G′(ω)+iG′′(ω)≈ibω+aiω=a2+b2ω2bω2+ia2+b2ωaω≪1≈a2bω2=Je0η02ω2;G′′(ω)≈a1ω=η0ω
그러므로
a=η01;b=Je0
임을 알 수 있다.
Waiting time for Dynamic Test
실제로 strain-controlled rheometer에서 실험해보면, 일정 시간 후에 stress의 진폭이 시간에 거의 독립적임을 알 수 있다. 이를 stationary response라고 한다.
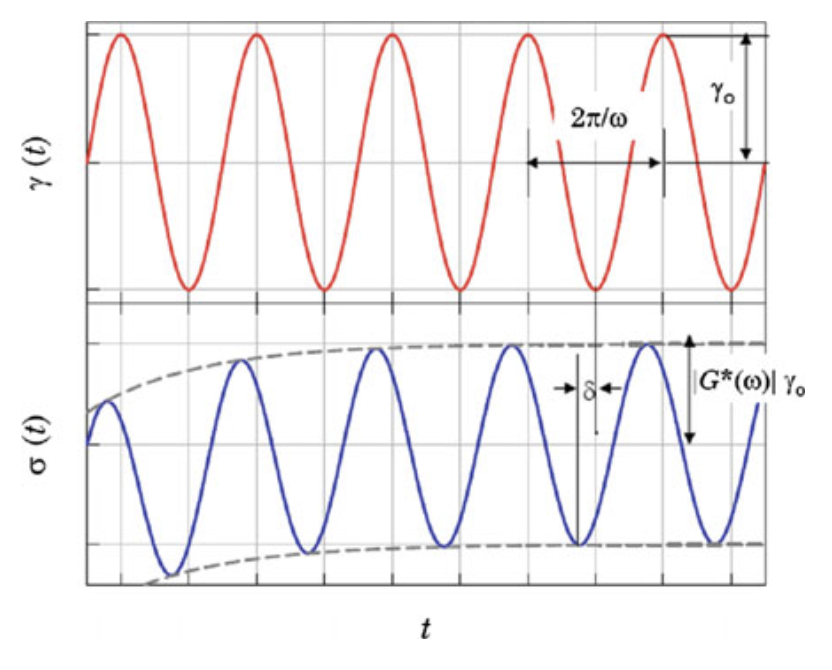
즉, rheometer는 stationary response, σ(t)를 stress의 진폭, σ0과 phase difference, δ(ω)를 통해 다음과 같이 나타낸다.
σ0σ(t)=∣G∗(ω)∣γ0=σ0[sinωt+δ(ω)]
위의 σ(t)는 BSP로 구한
σ(t)=G′(ω)γ(t)+ωG′′ωγ˙(t)
와 같아야 한다. dyanamic test에서 stationary response로 나타나는 σ(t)를 삼각함수 덧셈공식으로 전개하여 BSP로 유도한 σ(t)와 비교해보면 다음과 같은 결론을 얻을 수 있다.
G′(ω)=∣G∗(ω)∣cosδ(ω);G′′(ω)=∣G∗(ω)∣sinδ(ω) 