KITTI dataset
설명
2012년에 공개되었으며, 그 당시 구성하기 힘든 센서들로 수집, 가공된 데이터이다.
https://www.cvlibs.net/datasets/kitti/ 에서 데이터에 관한 자세한 내용을 얻을 수 있다.
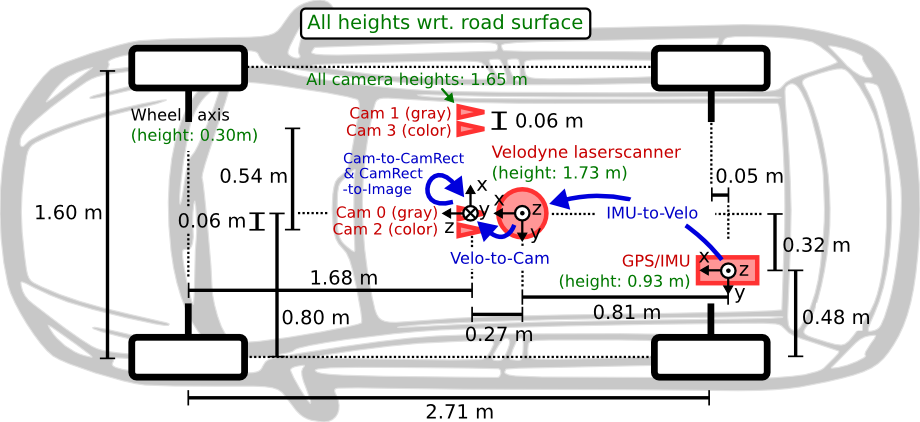
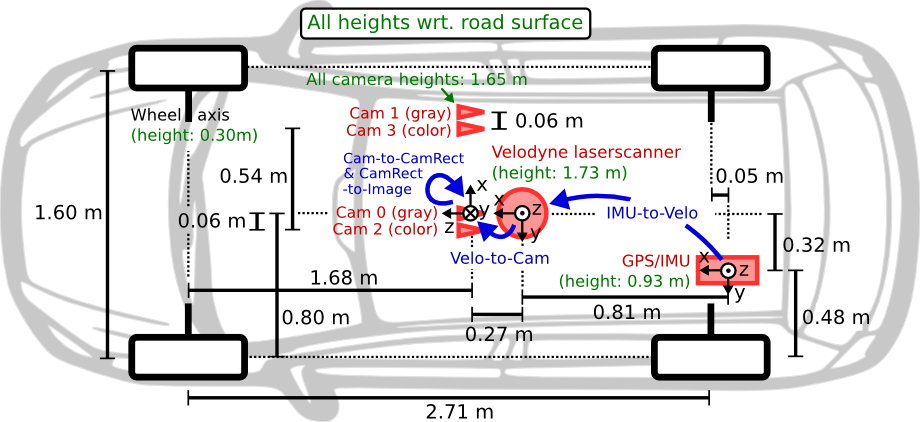
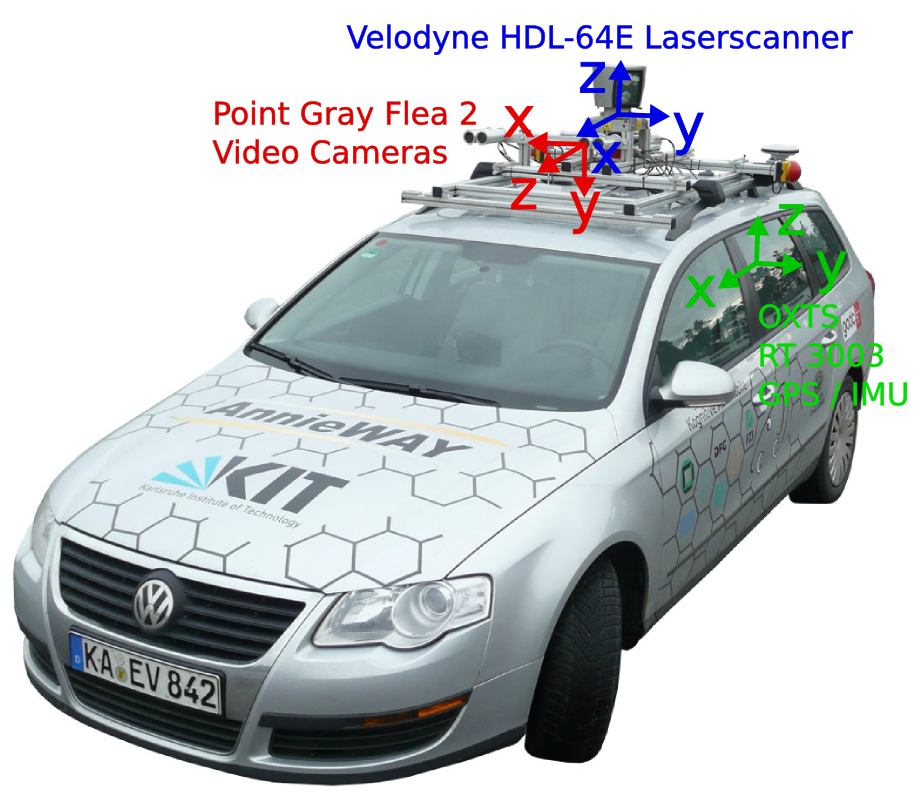
setup
서로다른 센서들을 융합해서 사용하는 경우, 센서가 설치되어 있는 위치를 고려하려 센서들간의 좌표계를 통일시켜주는 작업이 선행되어야 한다.
OD(Object Detection)
KITTI dataset에는 다음에 3가지의 객체 인식과 관련된 데이터를 제공한다. 특히 Brid's eye view는 카메라의 시점을 변환하거나, 카메라와 라이다를 맵핑해서 만든 데이터이다.
BDD100K dataset
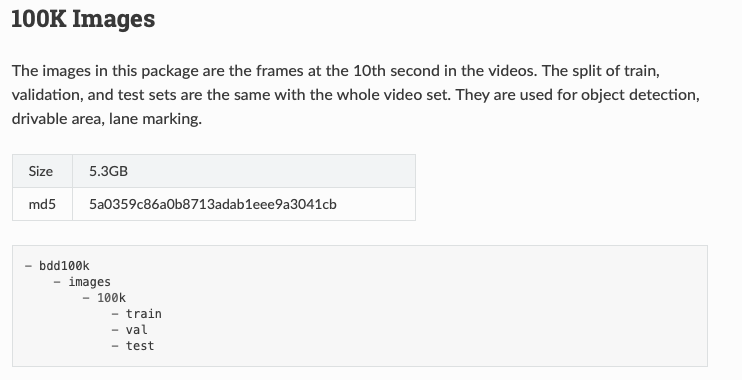
설명
2017년에 공개되었으며, 자율주행을 위한 딥러닝 어플리케이션 데이터이다.
https://www.vis.xyz/bdd100k/ 에서 다운로드 받을 수 있다. 해당 데이터의 경우 다양한 환경(도시, 날씨, 시간 등)에서 수집된 데이터이다.
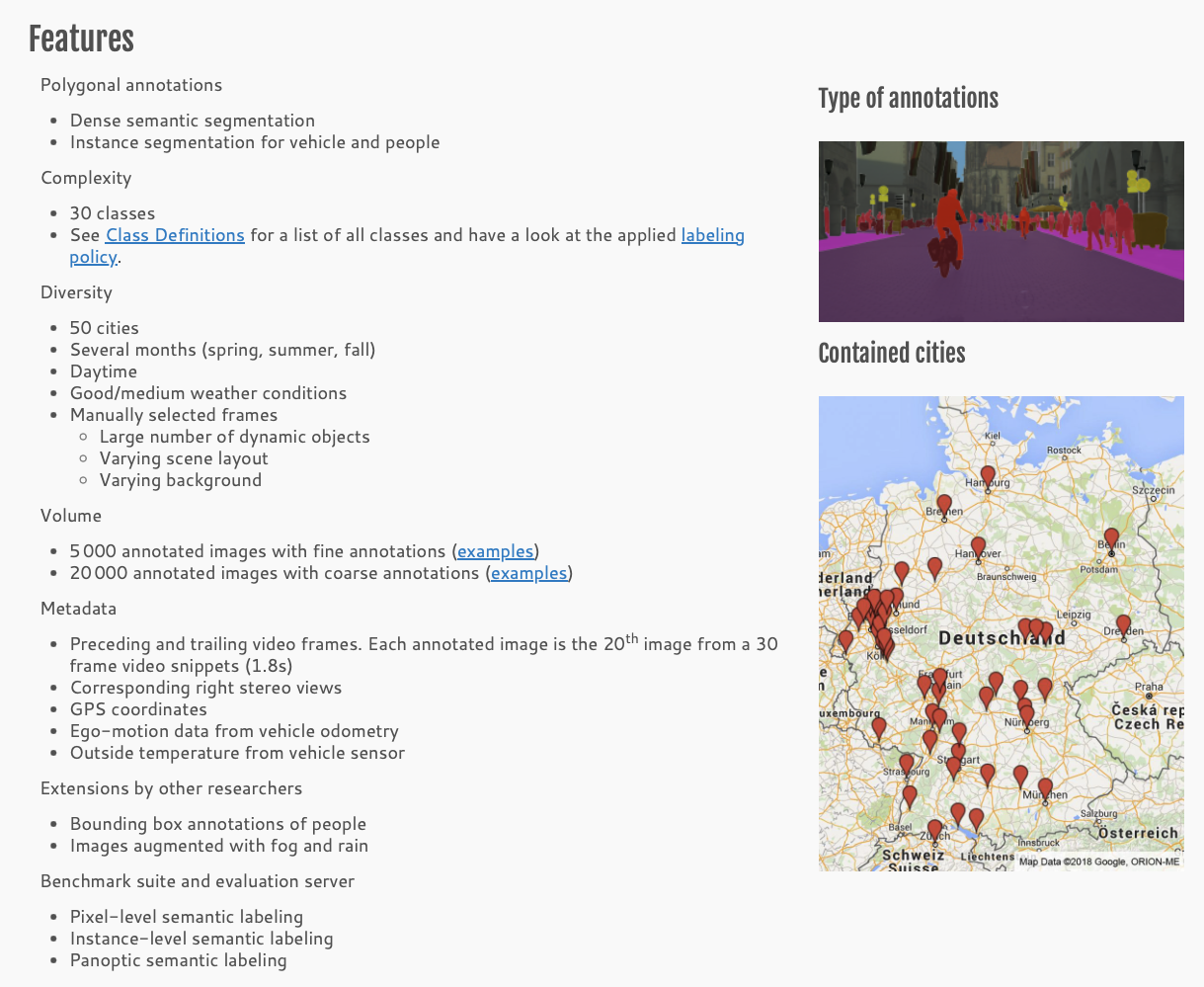
Cityscape
설명
위 두 데이터와 달리 해당 데이터는 image segmentation을 위한 데이터이다. https://www.cityscapes-dataset.com 에서 데이터를 받을 수 있다. 4개의 점을 이용해서 학습하는 객체 인식과 달리 segmentation는 다각형을 표현하기 때문에 n개의 데이터 포인터를 갖는다.
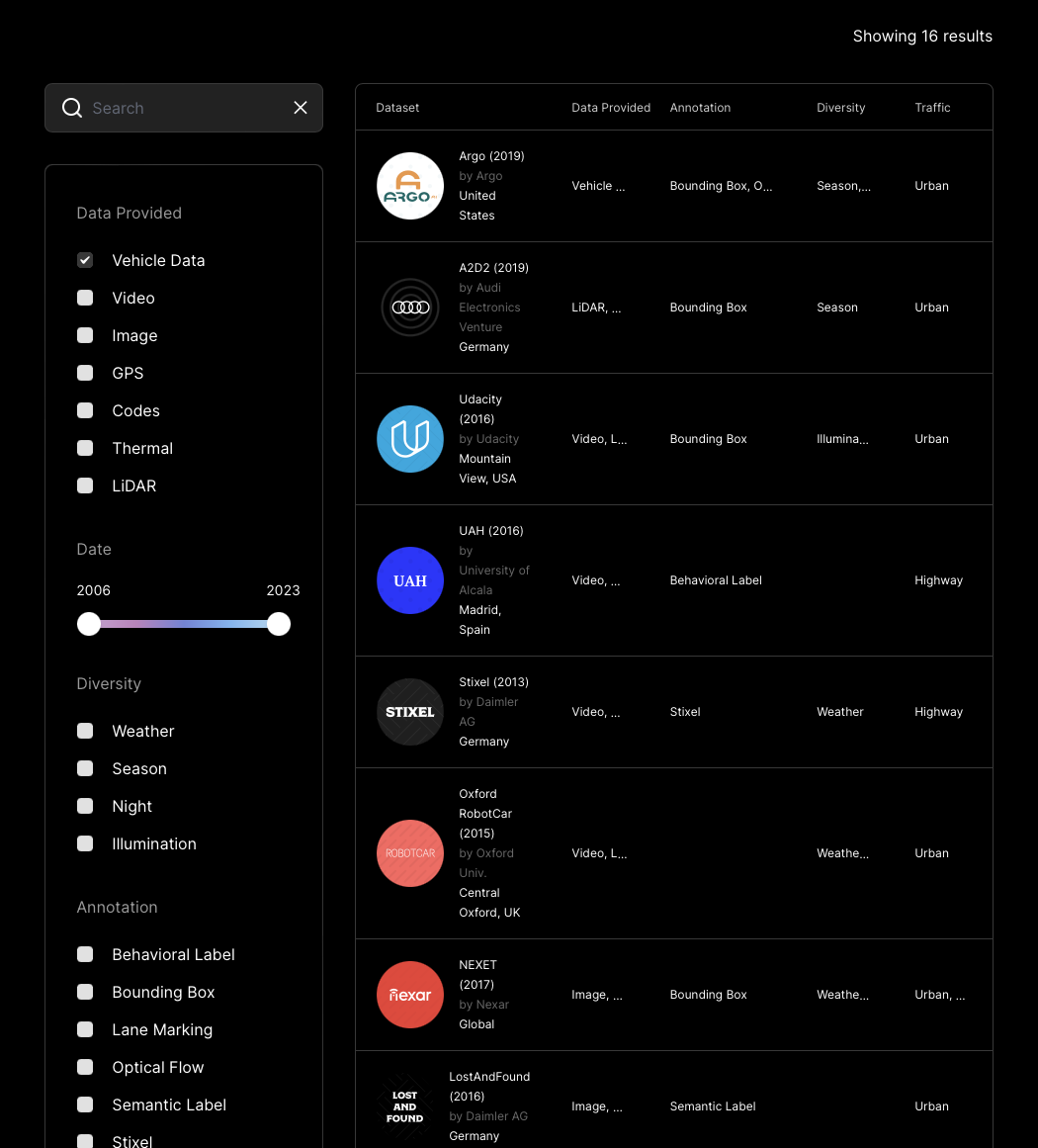
scale
자율주행 및 자연어 처리를 위해 공개된 학습 데이터들을 얻을 수 있는 사이트이다.
