- Fastcampus의 C#과 유니티로 배우는 게임 개발 올인원 패키지 Online - 유니티 개발을 위한 필수 수학&물리 강의를 수강하면서 정리한 내용입니다.
1. 강의 정리
2. 실습
1) localToWorldMatrix
Matrix4x4 matrix = transform.localToWorldMatrix;
한 위치를 로컬 공간에서 월드 공간으로 변환하는 행렬을 나타낸다.
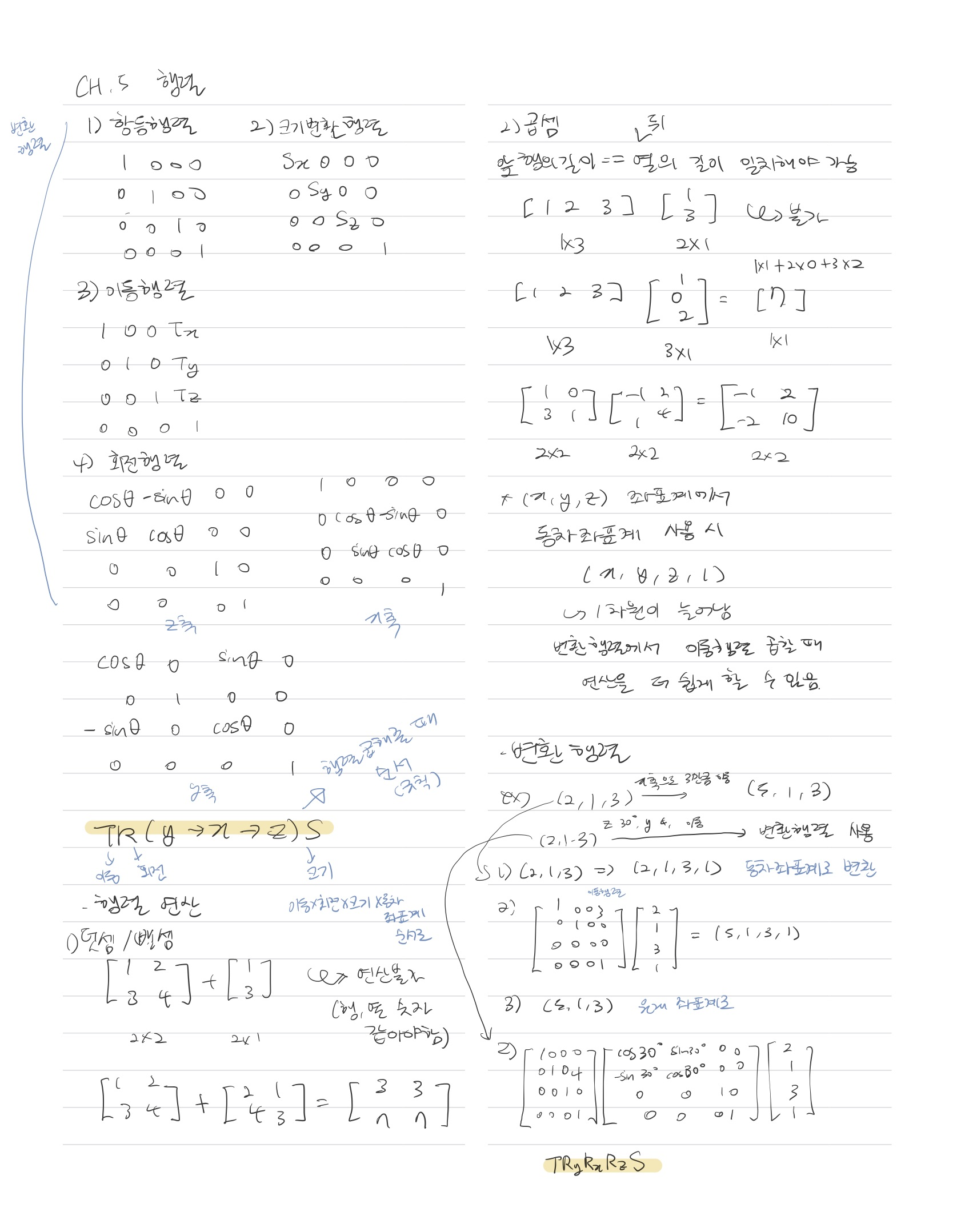
2) 변환행렬
- TRS 함수
Quaternion rot = Quaternion.Euler(45, 0, 45);
Vector3 tran = new Vector3(2, 1, 5);
Vector3 scal = new Vector3(10, 10, 10);
worldMat = Matrix4x4.TRS(tran, rot, scal);
TRS 연산을 해주는 함수
- 이동행렬, 회전행렬, 크기변환행렬
worldMat = Matrix4x4.Translate(new Vector3(2, 1, 5)) Matrix4x4.Rotate(rot) Matrix4x4.Scale(new Vector3(10,10,10));
이동행렬, 회전행렬, 크기변환행렬로 TRS 연산
3) Quaternion
Quaternion rot = Quaternion.Euler(45, 0, 45);
오일러각이 (45,0,45)인 값을 쿼터니언으로 변환해서 사용하겠다.
- 쿼터니언
- 변환행렬에 회전행렬을 이용한다고 했음(오일러 각 - 0~360도 각도를 이용한 것)
- 하지만 오일러 각 이용시 짐벌락이라는 현상 일어남
- 짐벌락 : 각 회전에 대해서 서로가 종속적이어서 생기는 문제
- 쿼터니언(사원수) 개념 도입해서 짐벌락 문제 해결
- 회전에 관한것은 전부 쿼터니언을 걸쳐서 연산을 해야함
4) 변환행렬 -> 이동행렬, 회전행렬, 크기변환행렬
Vector3 position = matrix.GetColumn(3);
Debug.Log("=== Position ===");
Debug.Log(position);
Quaternion rotation = Quaternion.LookRotation(
matrix.GetColumn(2),
matrix.GetColumn(1)
);
Debug.Log("=== Rotation ===");
Debug.Log(rotation.eulerAngles);
Debug.Log("=== Scale ===");
Vector3 scale = new Vector3(
matrix.GetColumn(0).magnitude,
matrix.GetColumn(1).magnitude,
matrix.GetColumn(2).magnitude
);
Debug.Log(scale);

기록용.