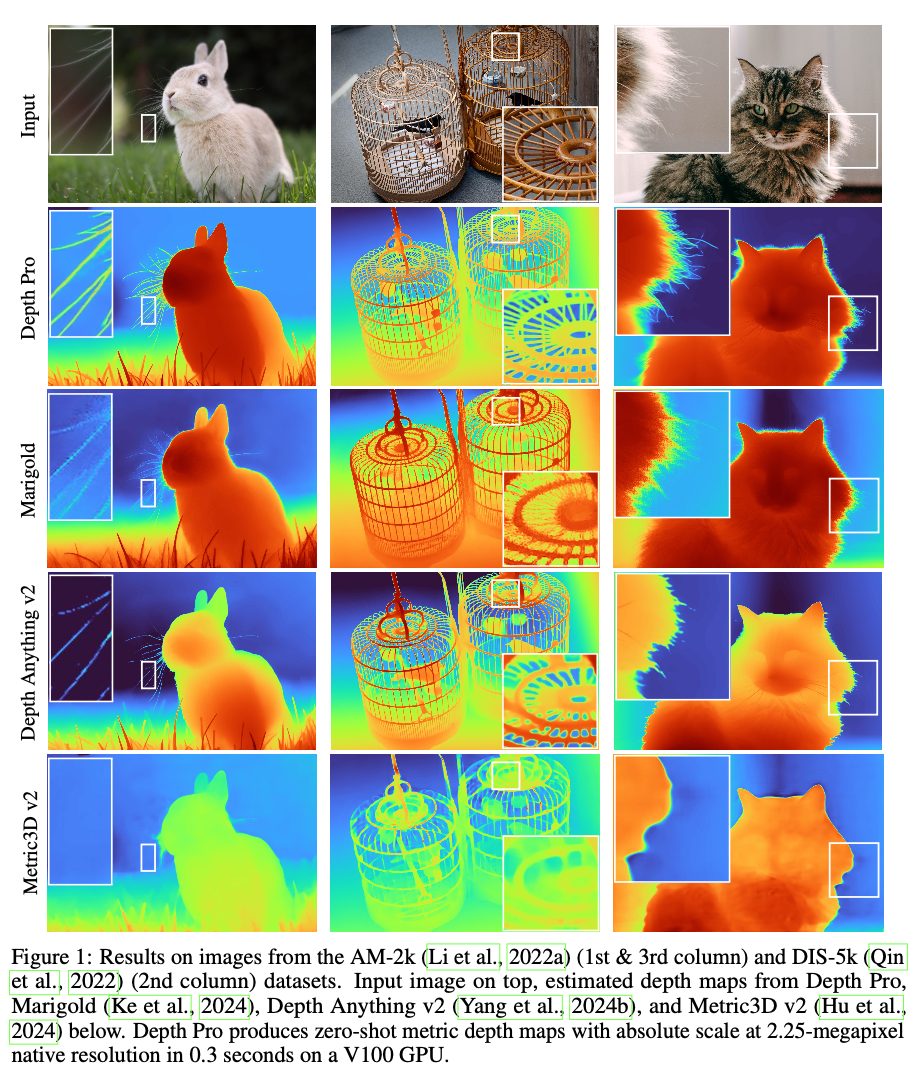
- zero-shot
- monocular
- metric
(우와)
Recent works
- Zero-shot depth
이전 연구들이 사용한 methods
- 데이터셋을 엄청 많이 먹임
- scale-and-shift invariant loss (MiDaS)
- transformer-based 모델
- self-supervision
- diffusion models
이전 연구들은 모두 scale에 대해 ambiguous하다.
- Zero-shot metric depth
이전 연구들은
- global하게 depth scale 기준을 주거나
- 특정 scene에 대한 조건을 주거나
- camera intrinsics/camera embedding를 사용하거나
- point clouds를 utilize하기 위한 별도 모델을 학습시키거나
- surface normals를 사용하거나
우리는 depth 모델에서 얻은 features에서 바로 scale을 얻어낸다.
- Sharp occulding contours
기존 연구들은
- normals
- image patches + global context를 학습할 수 있는 추가 methods
- diffusion priors
우리는 추가적인 모듈 같은 거 안 쓰고 metric depth maps 얻으면서 더 깔끔하게 누끼 딸 수 있다.
- 테두리 누끼 metric
- Segmentation & matting 데이터셋을 기반
- 복잡하고 다이나믹한 씬에서도 사용 가능
- GT depth를 얻을 때
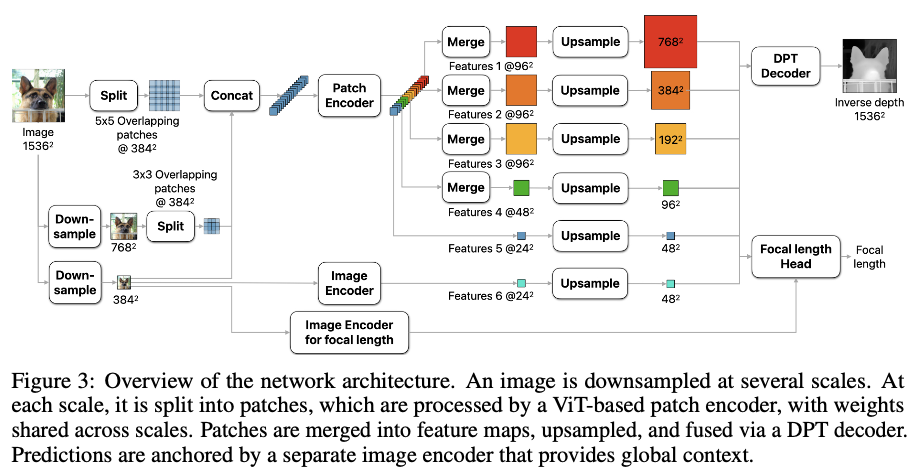
- multi-scale ViT
우린 ViT 변형하면 다시 훈련시키기 번거로우니까 ViT 백본으로 multi-scale한 후 하나로 fuse하는 아키텍처 사용해서 global context랑 local detail 모두 사용한다.
이전 연구들 보면 pretrained ViT 모델들이 semantic segmentation이랑 object detection에 많이 사용됐다.
3. Method
1. 인코더 & 디코더
인코더
- ViT 인코드 그대로 사용해 pretrained ViT 백본을 갖다 씀
- 384*384 이미지를 인풋으로 갖는 모델 사용
- 패치 크기로 원본 크기가 나눠떨어지지 않으므로 overlapping patches로 쪼갬
- Patch encoder: 여러 scale로 downsample된 이미지를 쪼개 얻은 각 패치들에 대해 scale-invariant representation을 얻을 수 있음
- 가중치를 모든 패치에서 공유하기 때문
- 패치마다 24*24 feature tensor를 출력
- Image encoder: 이미지를 384*384로 downsample하고 이를 Image encoder에 넣어 global context를 얻음
디코더
- DPT 모델과 유사
- 한 개의 map으로 합침
2. Sharp mono DE
Objectives
- 각 이미지
- canonical inverse depth 이미지 와 GT
- inverse depth 사용하면 가까운 영역에 우선순위 둘 수 있어서 NVS 할 때도 좋음
- Dense depth map
- 시야각 (focal length)
- width
- metric 데이터셋에서 모든 픽셀 {i}에 대해 MAE 계산
- real-world 데이터셋에서는 MAE 계산 시 각 이미지 내 상위 20% 오차를 가진 픽셀들은 discard
- non-metric 데이터셋 (intrinsics를 못 쓰거나 inconsistent scale)에 대해선 loss 계산 전 와 를 정규화
- 중간값에서 mean absolute deviation 계산해서 정규화
- Multiscale derivative loss
- 첫 번째 & 두 번째 derivatives를 각 scale에 대해 계산함
-
: #scale
-
: inverse depth map을 scale의 2배로 blurring and downsampling해서 구함
-
: spatial derivative operator *
- : 라플라스
- : 샤르
-
: norm
-
MAGE (Mean Absolute Gradient Error):
-
MALE (Mean Absolute Laplace Error):
-
MSGE (Mean Squared Gradient Error):
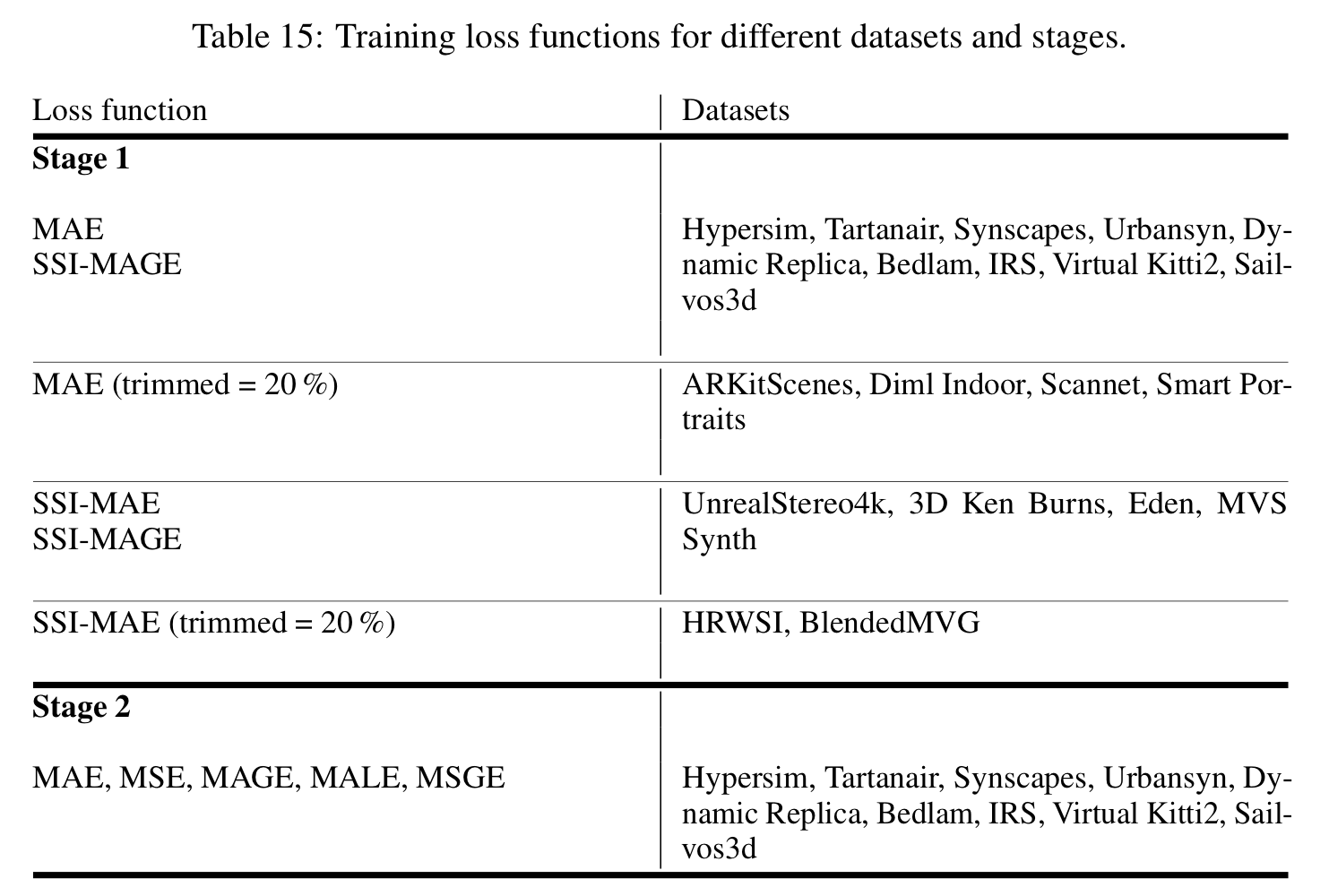
2-stage Training curriculum
보니까
- 큰 synthetic & real-world 데이터셋을 사용하면 generalize가 잘 되고
- synthetic 데이터셋과 달리 real-world 데이터셋은 depth가 완벽하지 않으며
- training course를 할수록 prediction이 샤프해지더라.
- First stage: generalize 될 수 있도록 robust features 훈련시킴
- MAE on mixed datasets
- supervise on gradients of predictions
- gradients에 scale-and-shift-invariant loss 쓰면 optimization이 느려져서 synthetic 데이터셋에만 적용
- Seconds stage: 샤프한 바운더리 & 디테일
- only on synthetic data (완벽한 depth GT)
- MAE랑 gradients에 MAGE, MALE, MSGE
샤프한 바운더리 metric
- 엄청 디테일한 부분에 대해서까지 완벽한 GT depth를 얻기가 너무 어려움
- matting, saliency, segmentation에 대해서는 완벽한 GT를 찾기 쉬워서 이걸 활용
- 이 binary maps는 물체들 간의 앞뒤 배치 관계를 나타냄
$ c_d(i, j) = [ \frac{d(j)}{d(i)} > (1+ \frac{t}{100})]$
- ranking loss라는 로스식에서 영감을 얻어 이웃하는 픽셀에 대한 pairwise depth ratio 사용해 앞뒤 배치 관계를 정의
- : , 픽셀 간의
occluding contour- 배경이나 다른 물체를 가리는 (occlude하는) edges
- : Iverson bracket
- 0이거나 1이거나
- : , 픽셀 간의
- 와 의 depth가 % 이상 차이 나면 두 픽셀 간 occluding contour
- 모든 이웃하는 픽셀에 대해 precision & recall 계산, 가 [5, 25]인 경우에 F1의 weighted averaging 계산함
- 클수록 큰 weight
- prec & recall은 scale-invariant (데이터 shape에 영향 X)
- 엣지들을 매뉴얼하게 annotate할 필요가 없고 pixelwise GT만 필요함 (synthetic 데이터셋들에서 얻기 쉬움)
Focal length estimation
- Focal length Head와 별개 인코더를 Depth estimation 학습이 끝난 후 학습시킴 (joint X)
- 메타데이터를 사용할 수 없을 경우
- L2 loss

Hail hamster