흔들린 frame에 대해 robust하게 mapping & tracking
핵심
- NeRF/3DGS 기반 SLAM에 사용 가능한 photometric BAed deblur mapper
- MBA tracker -> 더 나은 mapping & tracking
Recent works
MBA-VO(feauture-based visual odometry 기반)에서 가져온 motion blur aware tracker- feautre-based VO는 input frame 간 keypoints를 통해 consistency를 맞춰줌
- 기존 연구와 달리 MBA-VO는 initial motion prediction에 의존하지 않고 local camera trajectory를 directly optimize해 이미지 patch를 reblur함
BAD-NERF,BAD-Gaussians에서 사용된 motion blur aware BA algorithm- BAD-NeRF의 vanilla NeRF representation을 tri-plane으로 변경
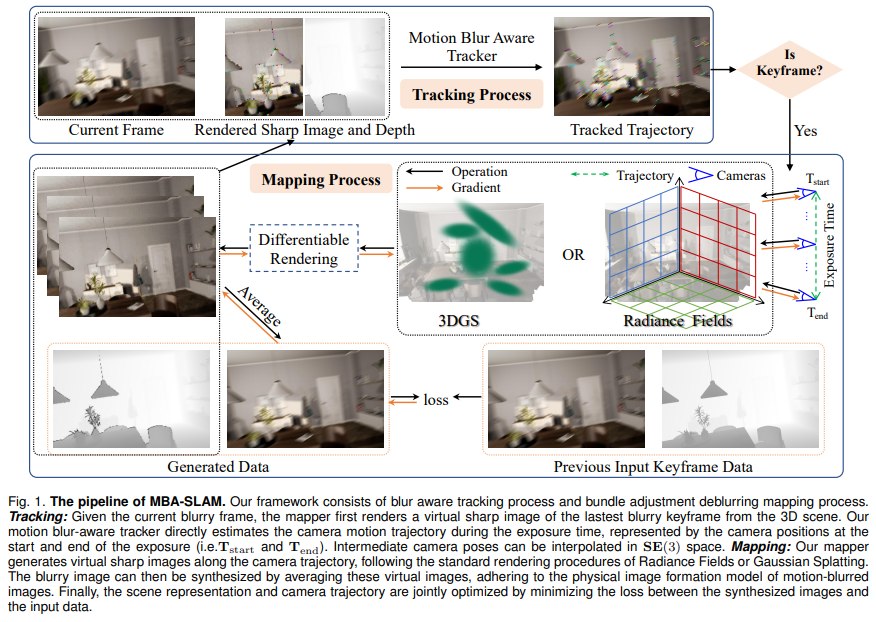
Method
- tracking: estimates local camera trajectory relative to the latest rendered sharp keyframe image
- mapper: jointly learns representation & trajectories
Motion blur image formation model
Physical formation process of motion blurry images
- blurry image는 여러 sharp images의 평균치라 가정한다
Motion blur aware tracker
How the tracker estimates camera motion trajectories from motion-blurred images through direct image alignment
Direct image alignment with sharp images
Original (direct VO apporach)
- 이전 keyframe과 현재 frame의 photometric error 최소화
- depth로 하는 그 과정
- robust loss (huber loss)도 추가해서 더 정확한 pose 얻음
- 근데 애초에 blurry images는 photometric error가 크고 T도 부정확해서 direct VO 못 씀
Camera motion trajectory modeling
- exposure period (0~) 동안의 local camera trajectory를 정의해야 motion blur를 해결한다!
- 이전 & final frame의 camera pose 간 linear interpolation하는 방법
- 이 방법으로 motion blur를 여러 sharp image로 표현하는 것과 관련된 방식으로 해결 가능
- 근데 이 방법은 방향이 급격히 바뀌었을 때 성능이 떨어짐
- 이전 & final frame의 camera pose 간 linear interpolation하는 방법
- 그래서 우리는 exposure period (0~)의 처음과 끝에서의 camera pose -> linear interpolation
이 식을 decompose하면
MBA trackerestimates & for each frame- lienar interpolation으로도 잘 되는 이유! exposure time이 아주 짧기 때문
Direct image alignment with blurry images
- reblur the keyframe rather than deblurring the current frame
- blurry -> reference image로의 pixel coord match 찾고
- [0, ] 내 virtual view (sharp)를 uniformly sample해서 구하고
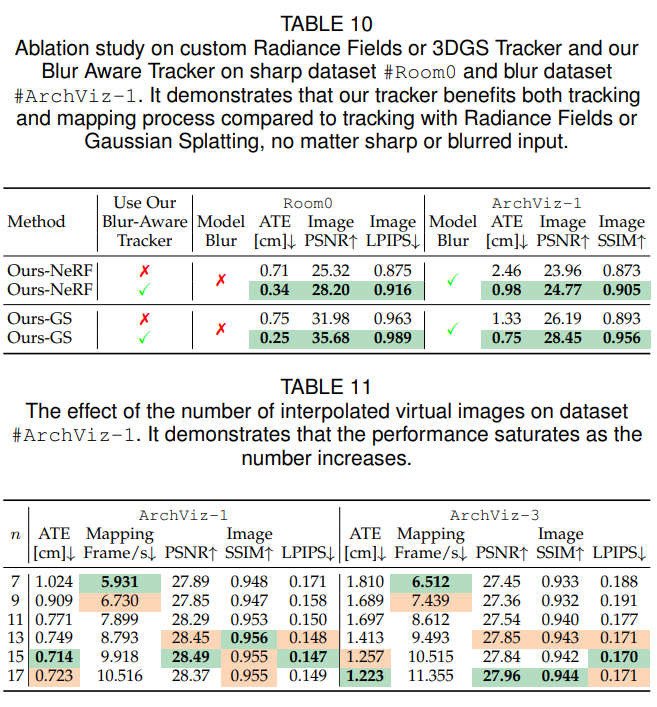
- 몇 개의 virtual view를 만드는가는 7개로 설정했다고 함
- blurry한 정도에 따라 dynamic하게 개수를 설정할 수 있음
- reblurred image의 RGB를 bilinear interpolation & 평균치로 구함
- 이제 실제 blurry image와 reblurred image 간 photoconsistency loss 계산
Motion blur aware mapper
Trajectories & representation estimated by maximizing photometric consistency between synthesized & real blurry images
- NeRF든 3DGS든 사용하는 learnable parameters에 , 추가
Loss functions
: synthesized blurry image & actual blurry image
: rendered depth & actual depth
- If NeRF,
: ESLAM + 위 loss functions
- If 3DGS,
with scale regularization loss
while are scales of 3DGS
and SSIM loss between B(x)s
Experiments
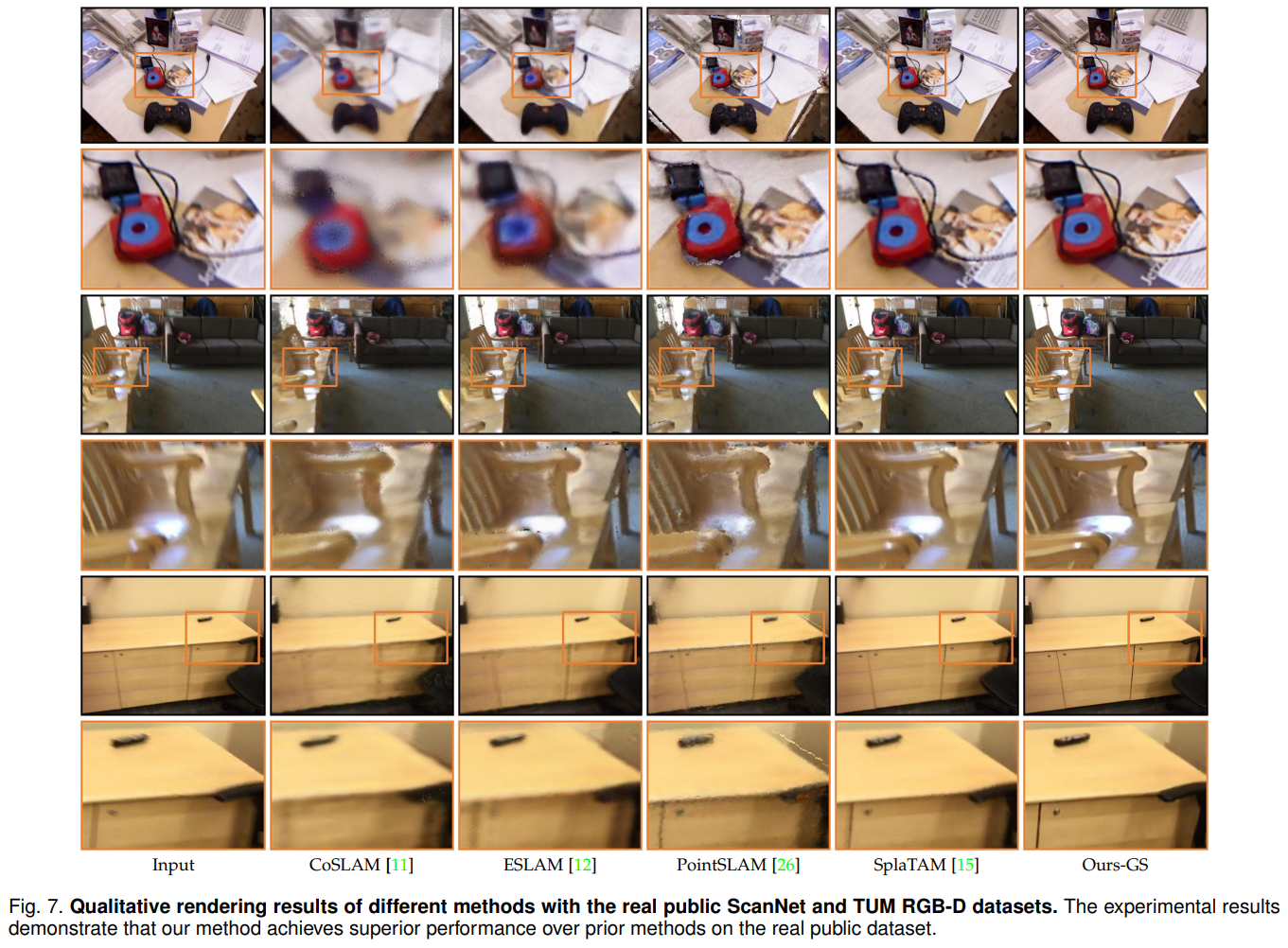
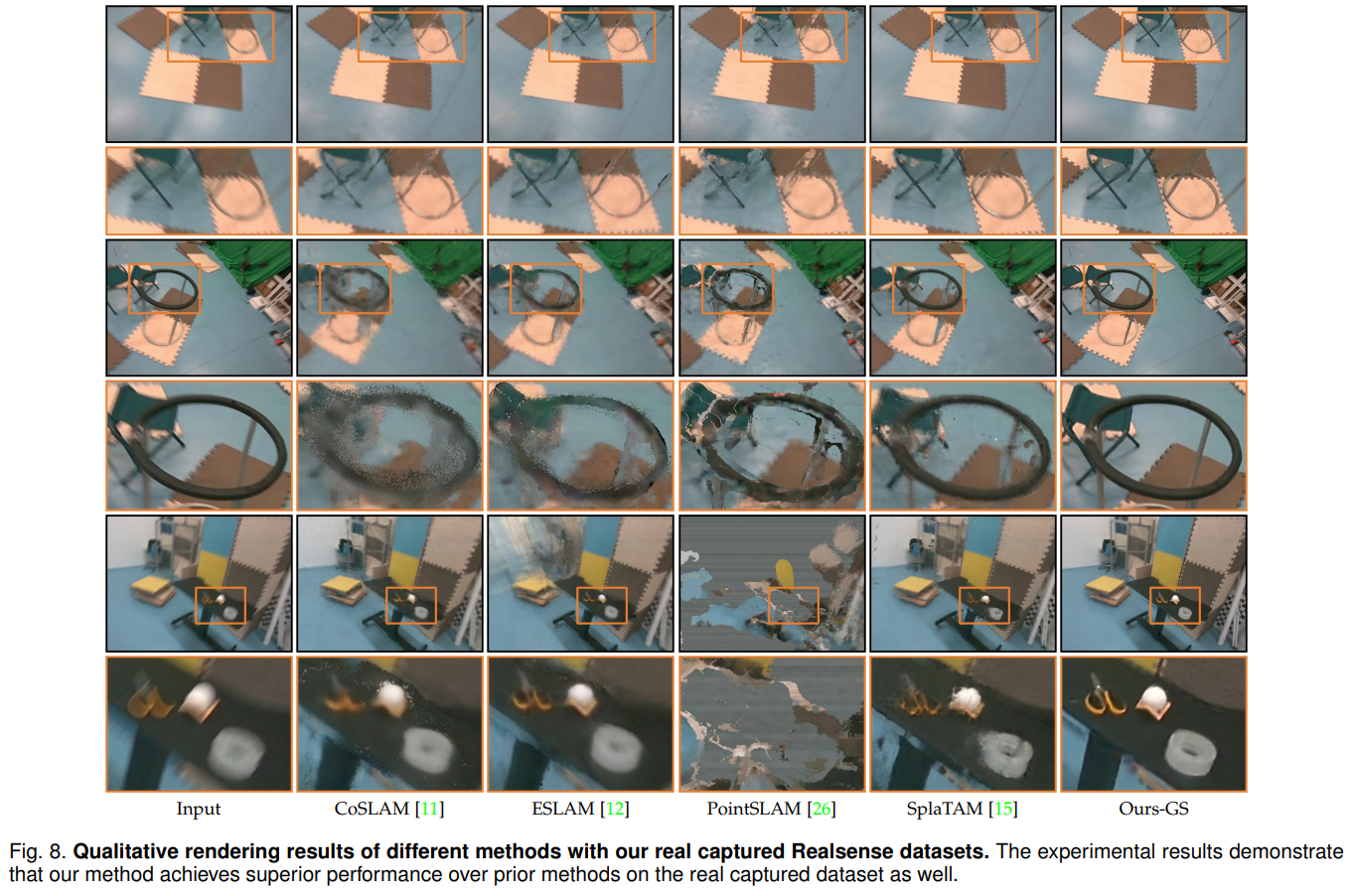
Qualitative
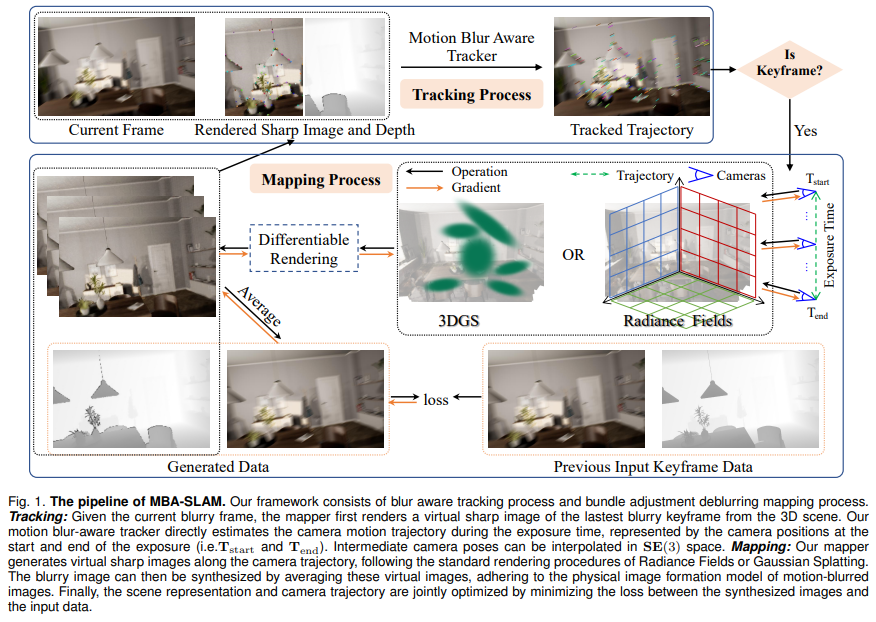
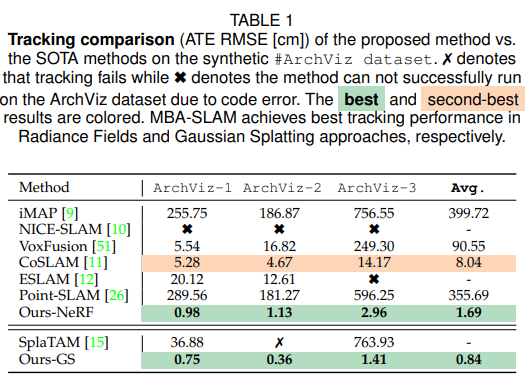
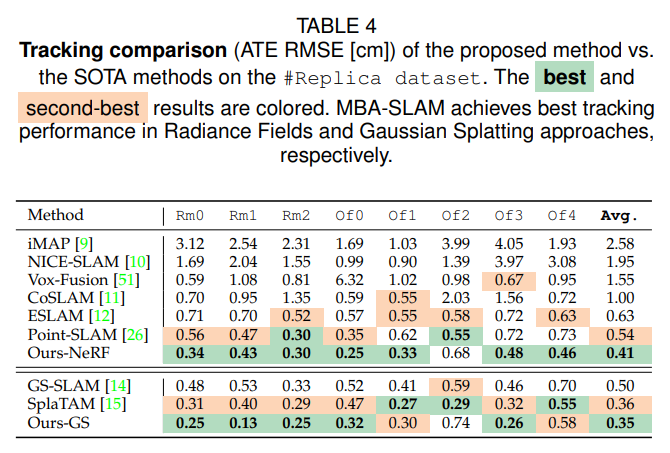
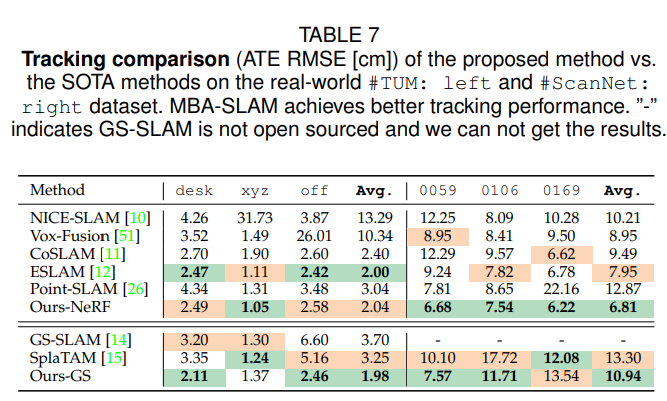
ATE RMSE

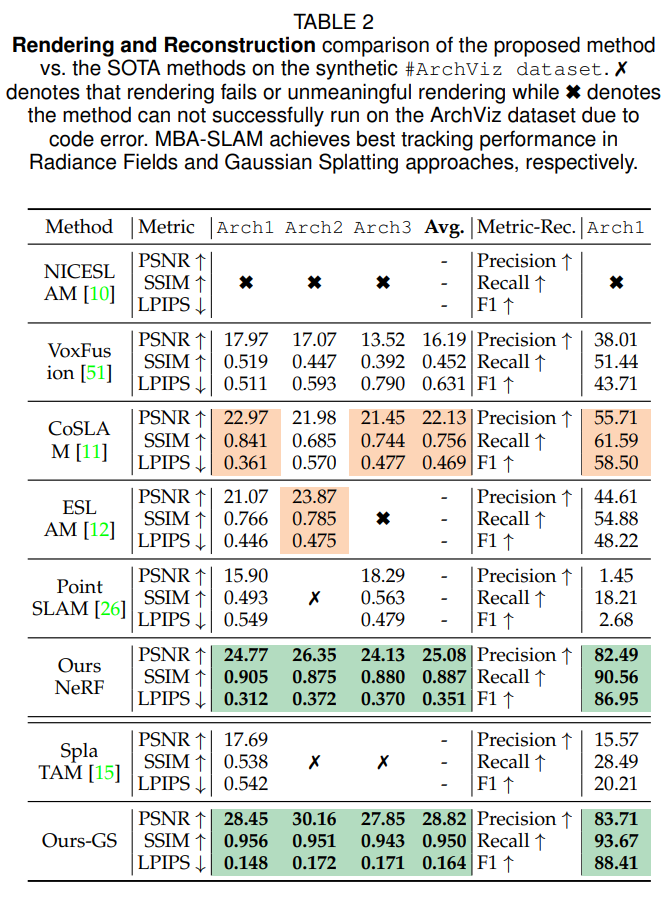
Rendering and Reconstruction

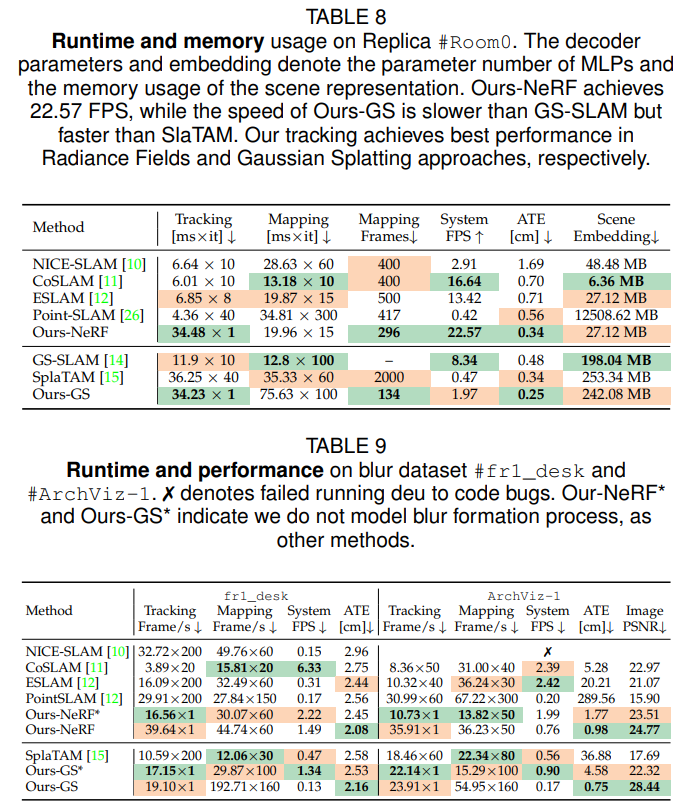
Runtime & Memory
Qualitative
Sharpness restored

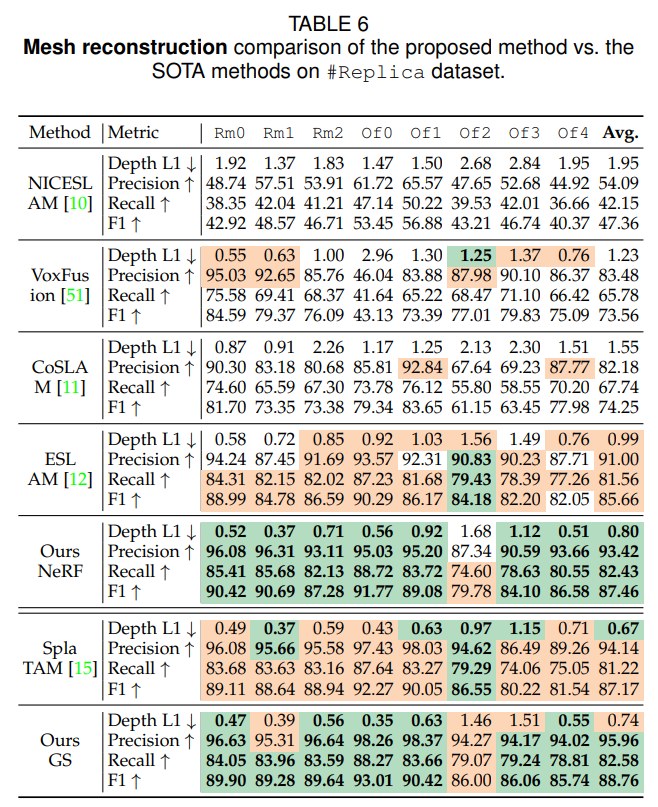
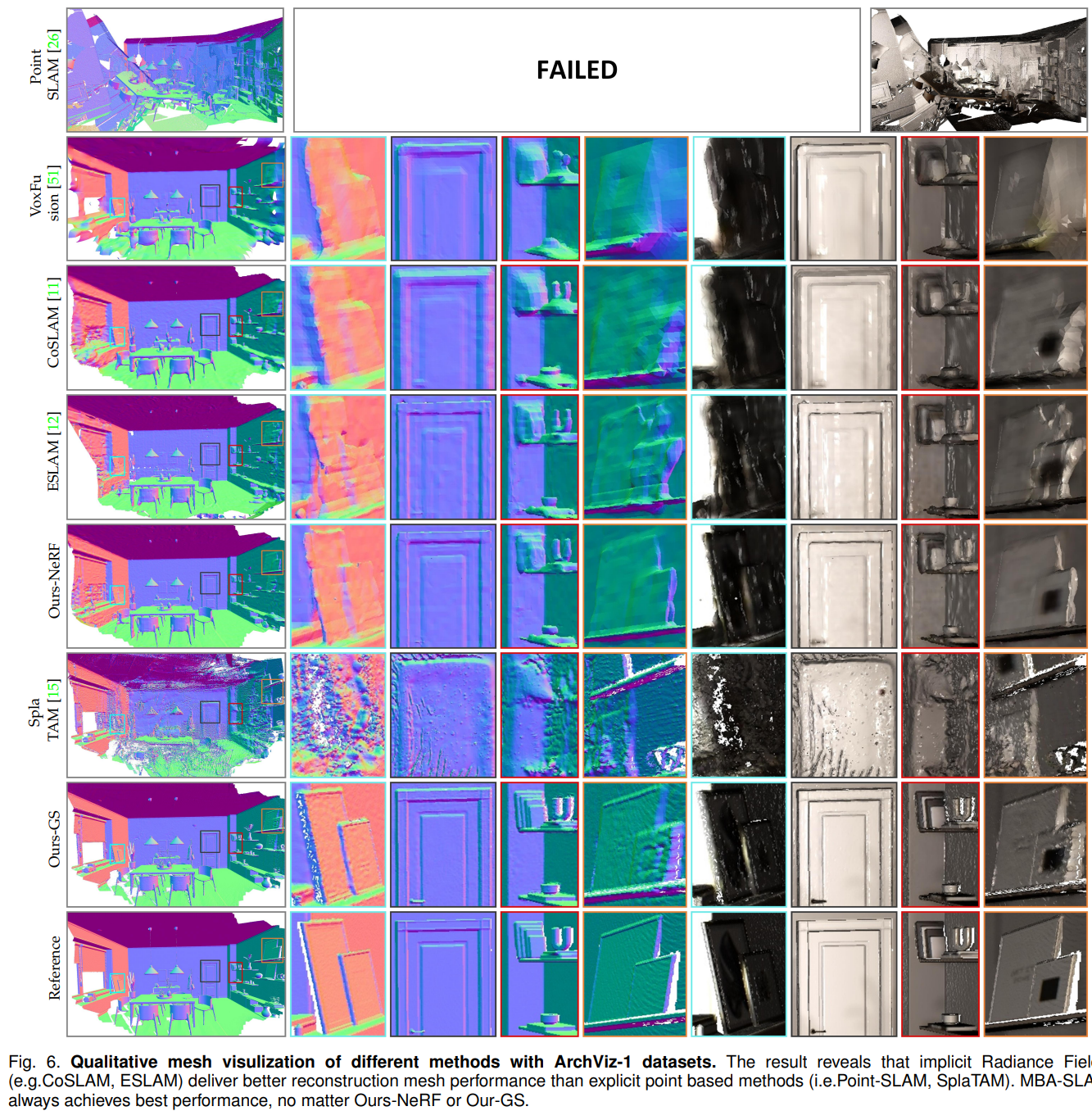
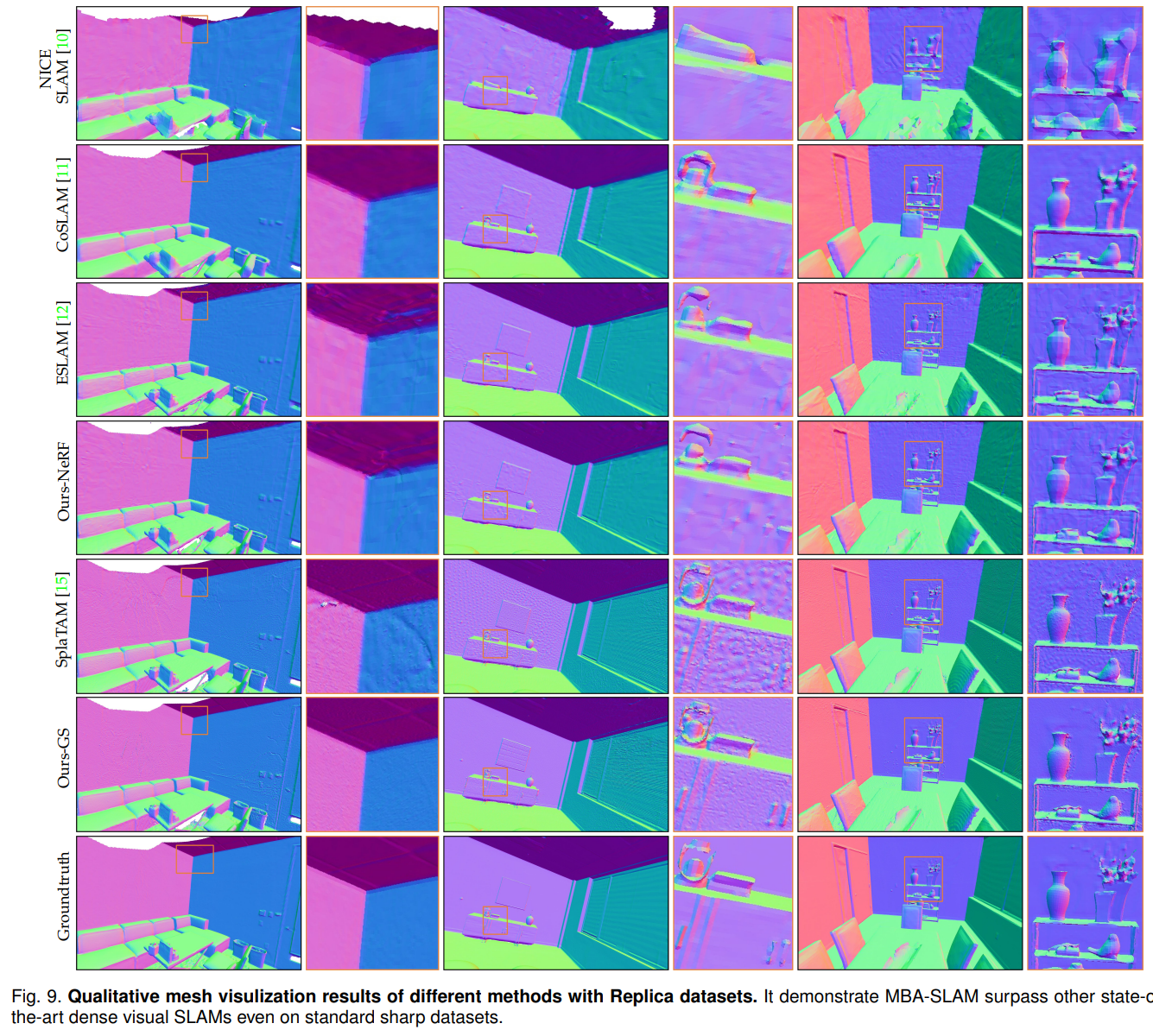
Mesh
Ablation & Comparison

Hail hamster