Community Detection
- 같은 그룹끼리는 edge가 많이 연결되어야하고 상대적으로 다른 그룹끼리는 edge가 적게 연결되어야한다.
- 조금 더 정확하게 graph의 평균 edge보다 그룹내에는 더 많은 edge가 존재해야하고 서로 다른 그룹끼리는 edge가 적게 존재해야한다.
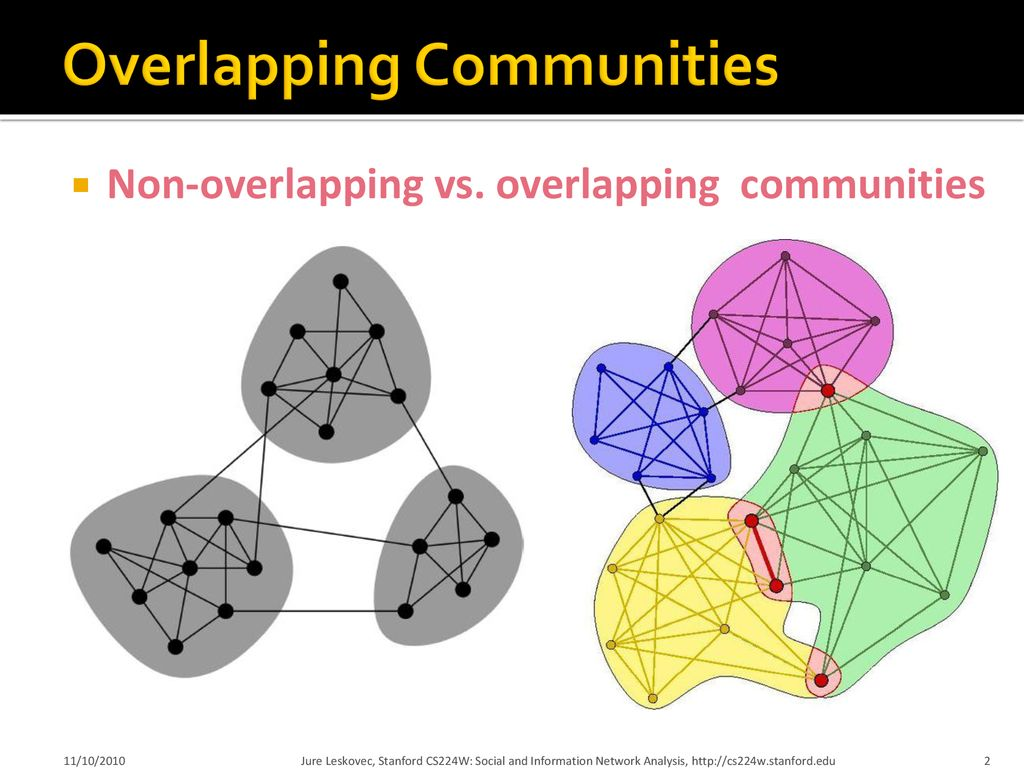
Overlapping & Non-overlapping community
- 하나의 노드가 여러개의 community에 속할 수 있는 경우에는 overlapping community라고 하고 노드가 한 개의 community에만 존재하는 경우에 non-overlapping community라고 말할 수 있다.
density
- 그래프의 밀도 혹은 평균 연결 정도를 계산할 수 있다.
- 그래프의 내부의 연결 강도와 외부와의 연결강도를 계산할 수 있는데 내부 강도는 일반적으로 그래프의 밀도보다는 높아야하고 외부 강도는 그래프의 밀도보다 낮아야한다.
modularity
- density는 community를 탐지하기에는 좋은 지표가 아니다. 따라서 더 성능 좋고 대중적인 modularity를 사용할 수 있다.
- modularity는 현재 그래프와 random graph를 비교하는 것으로 random graph에는 community가 없다고 가정을 하고 그것에 비해 얼마나 잘 community가 이루어졌는지에 대해 계산한다.
- 이전에 위와 같은 modularity 공식을 한번 보았다. 여기서는 편의성을 위해 위 식을 조금 수정하여 사용할 것이다.
- 조금 보정한 식이고 위 식은 특이하게 community 개수가 1개 일 때는 0의 값을 가지게 된다. 또한 위 식은 -1/2에서 1의 값을 가질 수 있고 커짐에 따라 상대적으로 community detection이 잘 이루어졌다고 판단할 수 있다. 조금 이상하게 보이지만 일반적으로 잘 작동한다.
Graph Partitioning
- graph partitioning을 통해 community detection을 수행할 수 있는데 먼저 둘의 차이를 먼저 보자
- Graph partitioning : 그래프를 최소한의 edge를 제거하여 여러 개의 subgraph로 만듬
- Community Detection : 그래프를 비슷한 특성이 있는 집단끼리 나눔
- 즉 Graph partitioning은 구조적인 연결을 중시한다면 community detection은 이보다는 조금 더 집단 간의 연결성을 중시한다고 표현할 수 있다.
- 이러한 Graph partitioning을 community detection에 사용할 수 있는데 multilevel partitioning을 통해 그래프를 계속해서 분할해 나가며 modularity가 가장 높았던 분할 지점을 선택하여 community를 찾아낼 수 있을 것이다.
Heuristic Approach
- Graph Partitioning과 같이 정확한 community를 찾아내기 위해서는 NP-hard 문제가 될 것이고 대규모의 그래프에서는 실제로 정확한 값을 찾는 것은 불가능하다. 따라서 여기서 또한 최적의 값을 찾는것을 목표로하고 여기서 최적이란 일반적으로 modularity가 높은 것을 말한다.
Edge Betweenness
- 이전에 나온 노드 중심성 중 하나인 Betweenness Centrality의 개념을 사용한다
- 서로 다른 노드의 최단거리에 현재 edge가 얼마나 많이 놓여있는지를 구하는 것이다.
- 이 중심성 지표를 이용하여 지표가 큰 edge를 순차적으로 제거해 나가는 방식이다. betweenness centrality가 높다라는 것은 서로 다른 community들의 징검다리 역할을 한다라는 것에서 나오는 아이디어이다.
- 알고리즘
- 를 모든 edge에 대해 구한다
- 가장 중심성이 높은 edge를 제거한다
- 위 2개의 단계를 반복한다.
- modularity가 가장 높았던 시간의 값을 선택할 수 있다.
- 매 step마다 Betweenness Centrality를 계산해야하기 때문에 비용이 크다는 것이 큰 단점이다. 따라서 큰 네트워크에서 적용시키에는 무리가 있다.
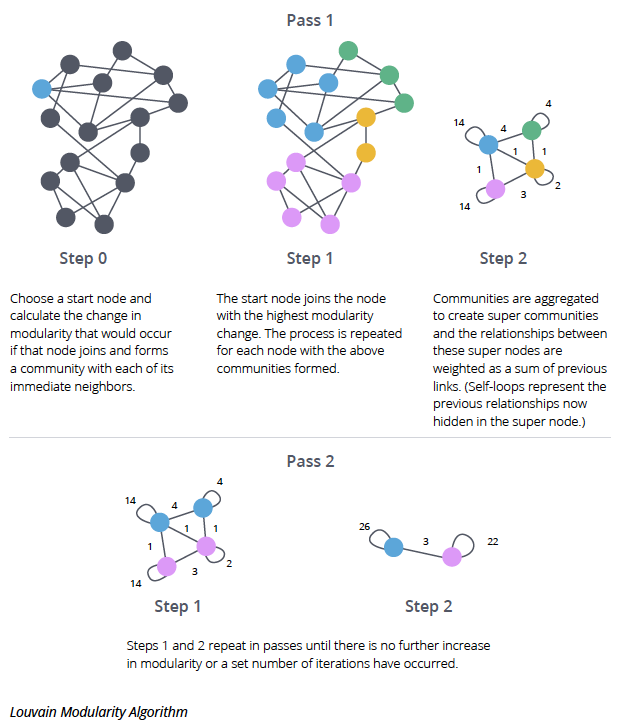
Louvain Algorithm
- 일종의 그리디 알고리즘으로 community detection을 수행한다.
- 또한 위 알고리즘의 단점을 보완하여 큰 그래프에서도 잘 작동하는 알고리즘이다.
- 알고리즘
- 모든 노드는 자신의 커뮤니티를 가지고 시작한다. 즉 N개의 노드가 있다면 N개의 커뮤니티로 시작하는 것이다.
- 모든 노드들은 각 스텝마다 이웃한 다른 커뮤니티에 흡수될지 되지않을지를 결정한다. 이때 기준은 modularity이고 이웃에 흡수되었을 때 modularity가 커진다면 흡수가 되고 그렇지 않다면 흡수되지 않는다. 또한 modularity가 커지는 이웃이 여러 개라면 최대인 경우를 선택한다. 이것이 그리디 알고리즘인 이유이다.
- 한 노드가 다른 노드에 흡수되면 하나의 super node를 생성하고 해당 노드들 사이에 있던 edge들은 self-loop로 들어가게된다.
- 위 과정을 modularity가 증가하지 않을 때까지 반복한다.
Hierarchical Clustering
- 개체들을 유사한 그룹으로 묶으며 계층적 트리 구조를 형성하는 기법이다.
Ravasz Algorithm
- 알고리즘
-
Similarity Matrix를 정의한다
- Ravasz 알고리즘에서는 다음과 같이 정의하였다.
- : 서로 공유하는 neighbor의 수
- : 서로 직접 연결되어있으면 1 아니면 0 (분모 보정용)
-
각각의 노드들을 가장 유사한 노드들과 community로 묶는다. 이후에는 community들끼리의 유사도를 판단하여 비슷한 community끼리 묶는다.
- 이 때 community의 유사도는 community 내부의 노드들의 유사도의 평균을 사용한다
- 다른 방법도 있지만 ravasz algorithm에서는 평균을 사용한다
-
이렇게 나온 결과를 다음과 같이 덴드로그램으로 표현한 후 modularity를 통해 적절한 분할지점을 찾는다.
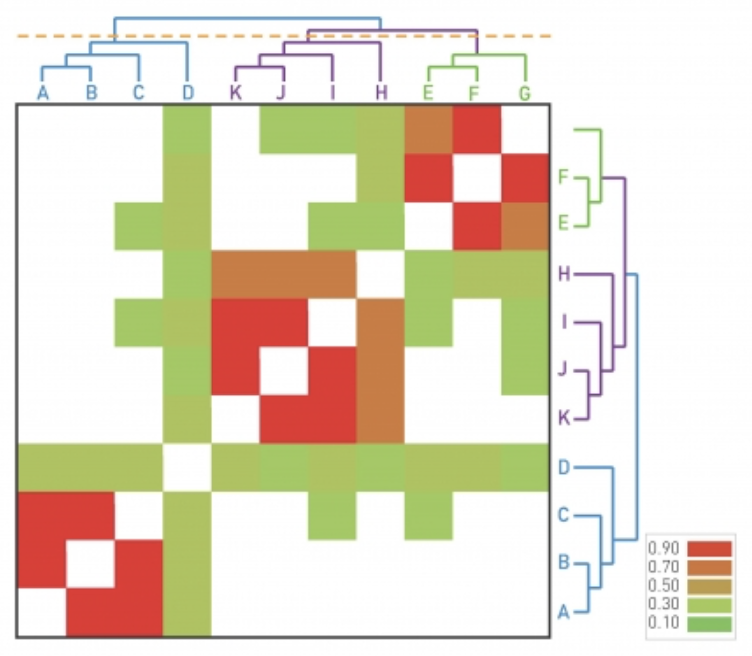
-
- 하지만 모든 노드간의 유사도를 구하는 과정에서 비용이 많이 들기 때문에 대규모의 그래프에는 적합하지 않다.
Random Walk
- 임의 보행 기법을 기반으로 하며 무작위로 걸었을때 같은 군집 안을 많이 걸어다닐 것이라는 추측을 기반으로 하는 기법이다.
- 어떤 특정 노드에서 시작하여 Random walk를 하였을 때 주로 거쳐가는 노드들을 하나의 community로 묶을 수 있다.
Walktrap community detection
- pagerank알고리즘과 동일하게 다음과 같은 공식을 사용할 수 있고 이 때 가 높다면 같은 community에 속한다고 말할 수 있다.
- i,j가 같은 community에 존재한다면 k에 도달할 확률이 비슷할 것이다라는 것을 전제로하며 와 가 비슷하다면 i,j를 하나의 community로 병합한다.
- 이 때 둘의 비슷한 정도는 다음과 같이 쉽게 계산할 수 있다.
- 이렇게 노드간의 거리를 구한 후 가까운 노드끼리 계층적으로 합하여 덴드로그램을 형성할 수 있다.
Walktrap Simluation
- 위의 식을 이용하여 행렬곱셈을 할 경우 복잡도가 크기 때문에 적절한 시뮬레이션을 통해서 구할 수도 있다.
- k번의 simulation을 통해 i노드에서 k노드에 도달한 횟수 를 구하고 이를 로 나누면 평균 도달 거리로 근사할 것을 될 것을 기대한다.
Overlapping Community detection
- 이전까지 본 방식은 모두 겹치지 않는 Non-overlapping Community에서 적용가능한 알고리즘들이었다. 하지만 이 방식을 Overlapping Community에도 적용할 수는 없다.
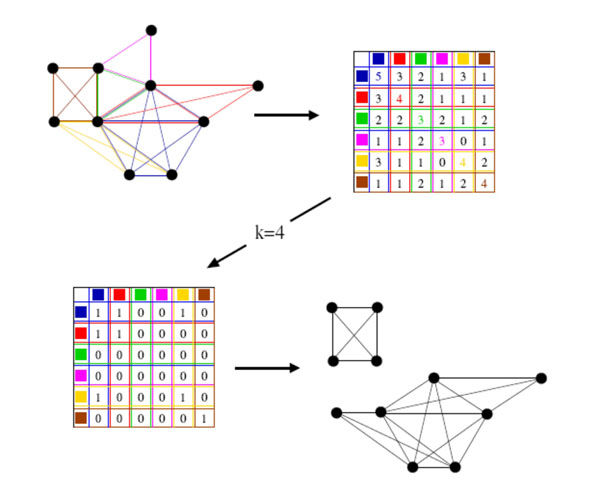
k-clique algorithm
- 알고리즘
- 그래프에서 모든 clique를 찾는다.
- 우리가 설정한 k에 따라 각각의 clique들이 k-1개의 노드를 공유하면 인접한것으로 아니면 인접하지 않은 것으로 표기한다.
- 인접한 clique들은 하나의 큰 community로 묶는다.
- 이때 우리가 정한 k에 따라 다른 결과가 나올 수 있어 여러 개의 k를 시도하는 것이 좋다
- 그래프 내에서 clique를 찾는 것은 매우 비용이 크므로 작은 그래프에서만 작동한다.
Conclusion
- 이외에도 수없이 많은 알고리즘이 존재하고 끊임없이 알고리즘이 생성된다. 또한 각각의 알고리즘의 특성과 장단점이 다르므로 알고리즘을 실제로 적용할 때에 이러한 장단점 및 특히나 복잡도를 신경써서 적용시켜야할 것이다.
