ROS란?
ROS는 Robot Operating System의 약자로, 말 그대로 로봇의 운영체제이다. 현재는 로봇을 개발할 때 필수적인 요소가 되었는데, 그 이유는 다음과 같다.
- 로봇 개발 특성 상 하드웨어 의존적인 소프트웨어를 개발해야하는데, ROS에서는 하드웨어 인터페이스의 통합으로 어떠한 환경에서도 실행, 수정, 업데이트가 편리하다.
- 로봇을 시뮬레이션, 테스트하기에 편리한 도구들을 제공한다.
- 코드를 패키지별로 모듈화하여 실행할 수 있으며, 이를 통해 코드의 확장과 재사용에 용이하다.
참고로, ROS 공식 홈에서는 위의 내용을 다음과 같이 표현하고 있다.
The Robot Operating System (ROS) is a set of software libraries and tools that help you build robot applications. From drivers to state-of-the-art algorithms, and with powerful developer tools, ROS has what you need for your next robotics project. And it's all open source.
여담으로 필자가 느낀 가장 큰 장점으로는, 일단 사용자가 많아 다수의 패키지, 라이브러리 그리고 오류가 발생했을 때 솔루션이 너무 잘 되어있다는 점이다.
실행 방식
그렇다면, ROS는 대체 어떻게 동작하는 것일까?
실행 방식에 앞서 ROS에서 사용되는 용어들을 몇 가지 정리해보았다.
Node: ROS에서 실행 가능한 최소 단위의 프로세서로, 다른 노드와 메세지를 주고 받으며 실행된다.Package: 위의 설명한 노드를 1개 이상 실행시키기 위한 파일Message: 노드간의 정보를 주고 받는 변수로,int,float,boolean외에도 여러 형태가 있다.Publisher: 메세지를 발송하는 노드Subscriber: 메세지를 수신하는 노드
기존의 ROS1에서는 Master가 존재하여 roscore를 입력한 후, 노드의 가운데서 Publisher와 Subscriber간의 통신을 연결하였다. 하지만, ROS2에서는 노드와 노드간의 연결이 Topic을 통해 가능하다. 즉, Topic이란 여러 개의 Publisher와 Subscriber가 연결이 될 수 있다. 지금까지의 말한 것을 그림으로 나타내자면 다음과 같다.
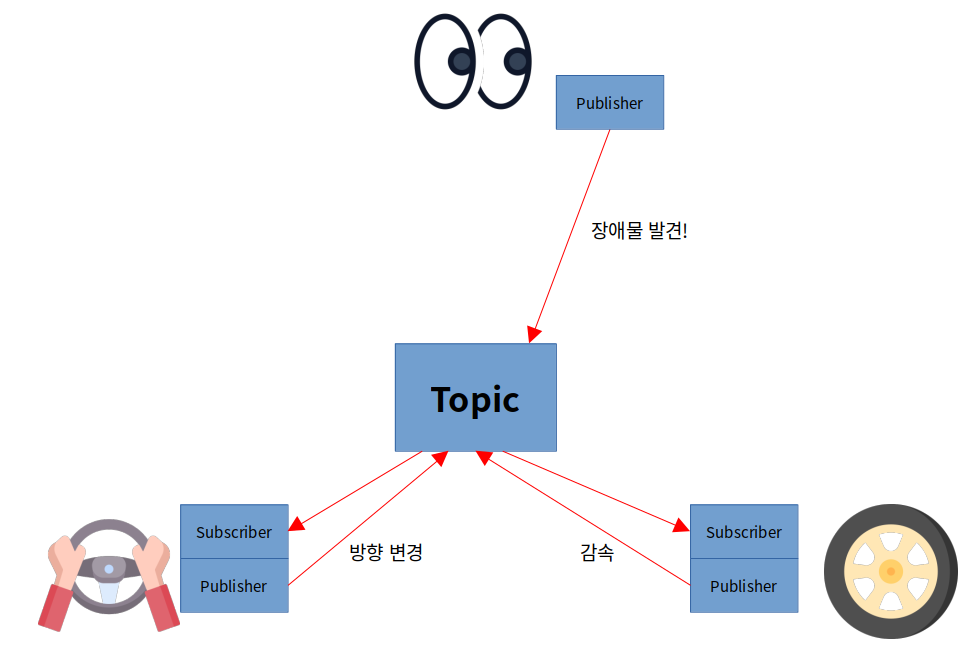
처음 센서를 통해 읽는 Publisher노드는 센서값을 토픽으로 발행하게 되고, Actuator는 받아온 값을 통해 동작하게 된다. 조금 더 정밀한 System의 경우, 현재 동작하는 값을 다시 토픽에 발행하여 오차를 줄일 수도 있다.
마치며
이번 포스팅에서는 ROS가 왜 필요하며, 어떻게 실행되는지 간단하게 알아보았다.
이어서는 본격적인 ROS의 설치와 실행을 하는 과정도 남겨보겠습니다..!