글 시작에 앞서 참고한 document입니다.
https://docs.ros.org/en/humble/Installation/Alternatives/Ubuntu-Development-Setup.html
환경
ROS2 humble은 Window, MacOS, Linux의 운영체제를 지원하지만, 일반적으로 리눅스 환경인 Ubuntu 22.04에서 사용된다. 이번 글에서는 Ubuntu 22.04를 기준으로 작성하겠습니다.
설치에 앞서 터미널에서 다음의 command로 현재 우분투를 업데이트 해준다.
sudo apt update && sudo apt upgrade
업데이트가 완료되었다면, 다음의 command로 자신의 locale을 확인한다.
locale
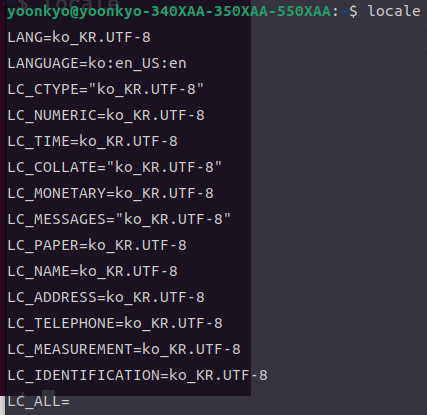
위와 같이 utf-8이 존재한다면 다음 단계로 넘어가도 좋지만, 설정이 되어있지 않다면 다음의 command로 설치 및 설정한다.
sudo apt install locales sudo locale-gen ko_KR ko_KR.UTF-8 sudo update-locale LC_ALL=ko_KR.UTF-8 LANG=ko_KR.UTF-8 export LANG=ko_KR.UTF-8 locale
위의 명령어를 실행한 후 설정이 위 그림과 같이 설정됐는지 확인한다.
만약, 영문 설치를 원한다면 en_US를 ko_KR대신 입력해줘도 된다.
설치
universe repository 활성화
sudo apt install software-properties-common sudo add-apt-repository universe
업데이트 후 GPG key 추가
sudo apt update && sudo apt install curl -y sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
source list에 추가
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
ROS2 Humble을 다운로드 하기 위한 설정이 모두 완료되었다!
업데이트를 해준 후 설치를 시작한다.
sudo apt update && sudo apt upgrade sudo apt install ros-humble-desktop
다음의 화면에서 Y를 눌러주면 설치가 시작된다. (약 2GB로 오래 걸리는게 정상)
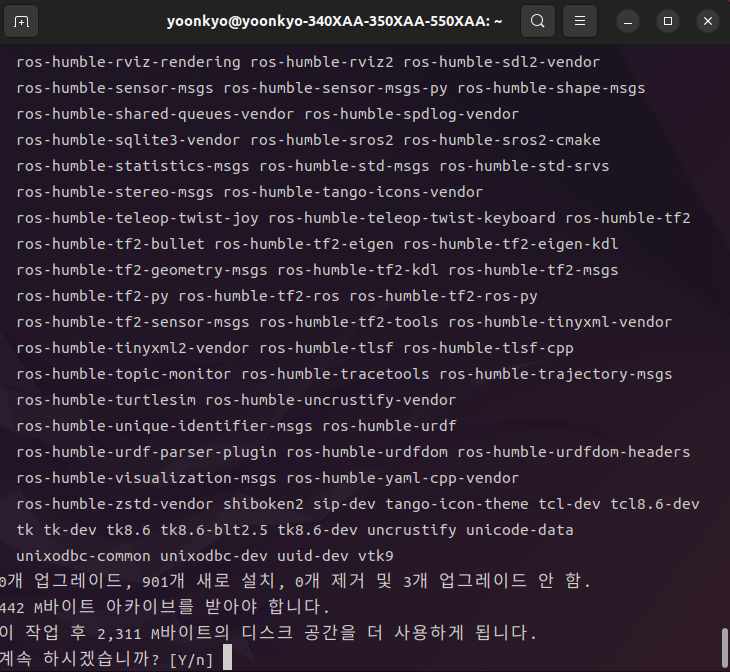
참고로, ros-humble-desktop은 ROS에서 Rviz와 같이 주로 사용하는 툴과 라이브러리를 포함하여 다운로드 한다.
추가로, build를 하는 도구인 colcon을 설치한다.
sudo apt install python3-colcon-common-extensions
여기까지 했다면, ROS2 Humble의 기본적인 설치는 완료되었다. 필요한 툴이나 extension은 필요할 때마다 추가적으로 하자.
실행
이제 예제를 통해 제대로 동작하는지 확인해보자!
source /opt/ros/humble/setup.bash
위의 명령어를 실행함으로써 우리가 설치한 폴더의 setup을 source할 수 있다.
그 후 예제를 실행할 workspace를 생성한다. 그냥 폴더라고 생각하면 편하다.
mkdir -p ~/example_ws/src cd ~/example_ws/src
위와 같이 디렉토리를 만들어준 후 해당 디렉토리로 이동한다.
이제 git에서 예제를 갖고 오겠다. 만약 git이 설치되어 있지 않다면 url로 직접 접속하여 humble branch에서 다운로드할 수 있다.
git clone https://github.com/ros/ros_tutorials.git -b humble
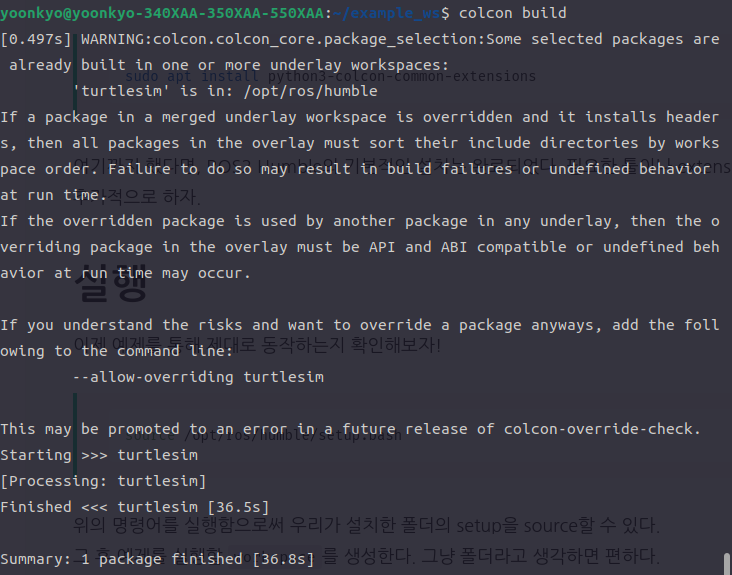
이제 다시 workspace로 돌아가 build한다.
cd .. colcon build빌드 성공시 터미널은 다음과 같다.
build가 완료된 package를 실행해보자.
ros2 run turtlesim turtlesim_node
TurtleSim이라는 새로운 창과 함께 거북이가 보인다.
새로운 node를 run해보았는데, 이를 그래프로 보고 싶다면?
source /opt/ros/humble/setup.bash rqt_graph
지금은 하나의 노드밖에 없지만, 나중에 여러 노드가 Publish, Subscribe하는 관계를 쉽게 볼 수 있는 도구이다.
마치며
ROS의 설치와 간단한 예제를 실행해보았다.
이어지는 포스팅에서는 실제 node의 source를 작성하고, 의존성 등에 대해서 공부해 보겠습니다!