Policy Gradient
1. Introduction
- just follow the gradient we get more reward.
- advantages or disadvnatages of using policy gradient competitive value based method
- why is better idea to work with policy based methods than value based methods
- some situation value function might be more complicated. policy will be more compact
-
what if vast action space
- solve complicated maximization every step
- use policy based method
-
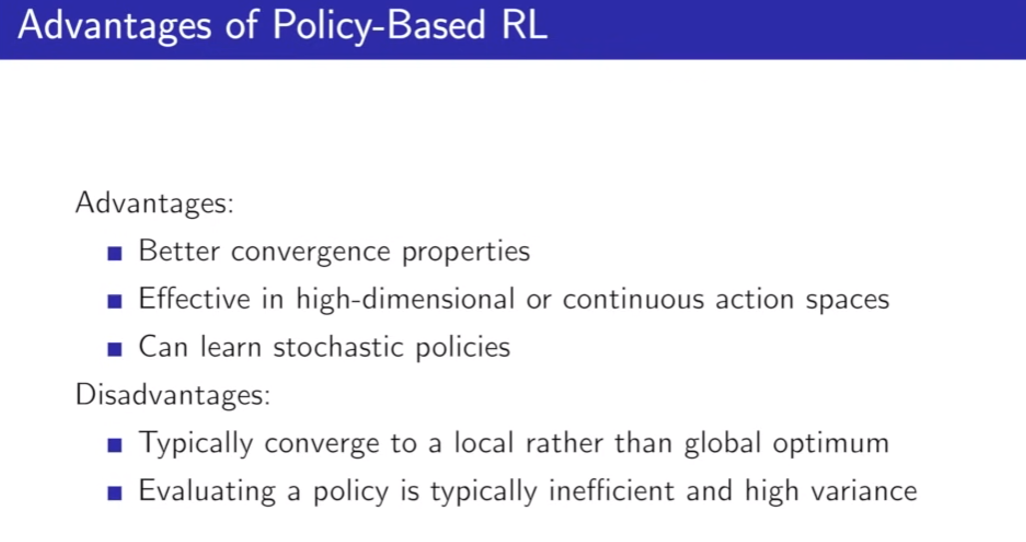
disadvantage :
- naive policy based RL might be slower, higher variance, less efficient than value based method
- value based method move absolutely what you estimate best policy
- gradient policy method move little
- this is the case
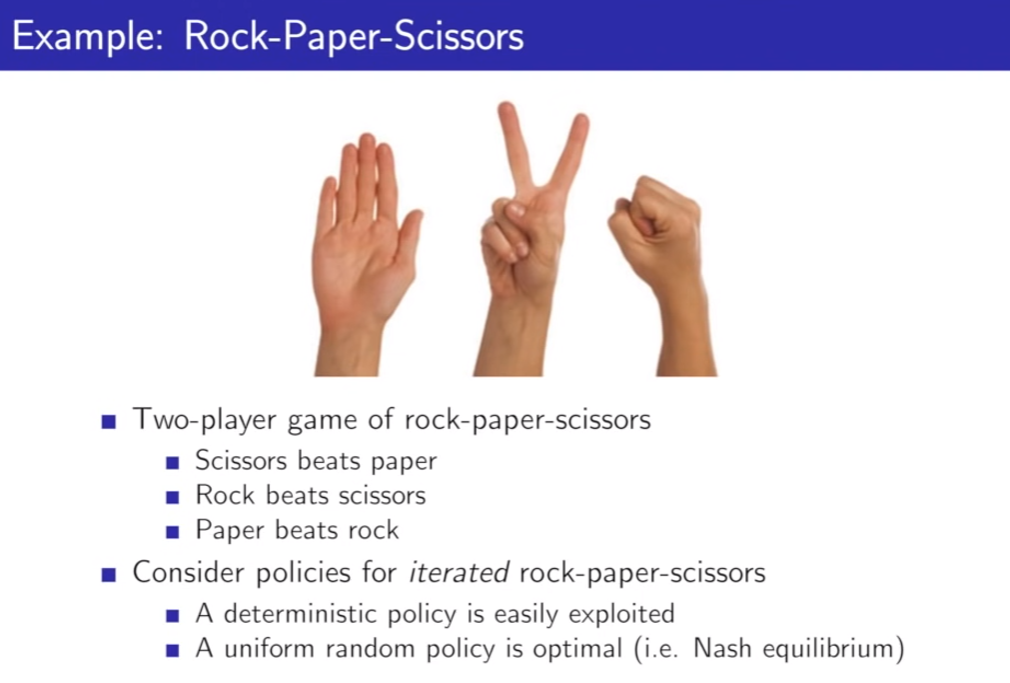
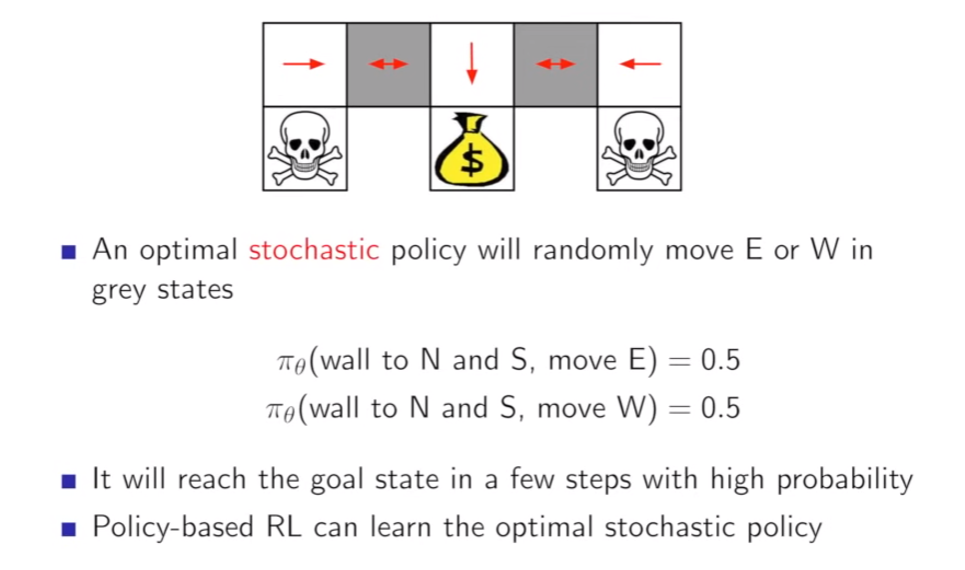
- optimal policy : play random
- optimal behavior is stochastic; stochastic policy is necessary
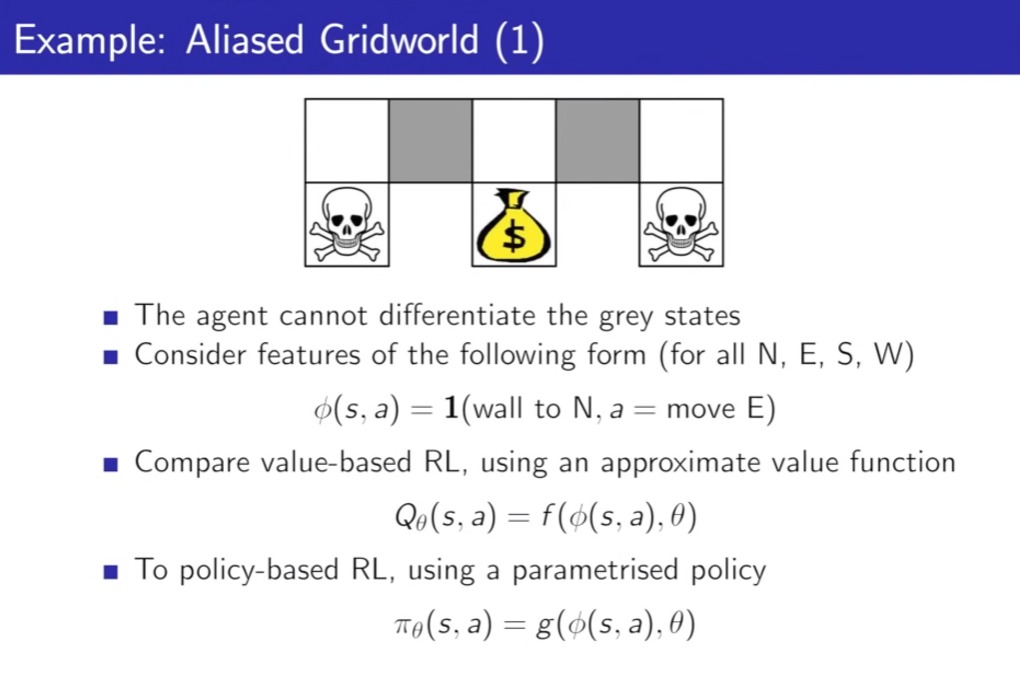
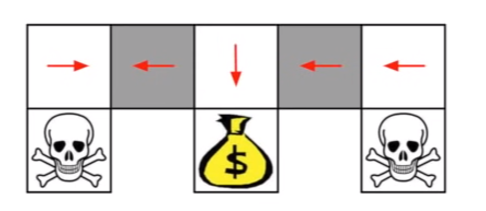
- in deterministic policy you pick the same action in those two grey states
- it taakes long to reach the tresure until you take from middle
- value based method
- stochastic policy is much better than deterministic one
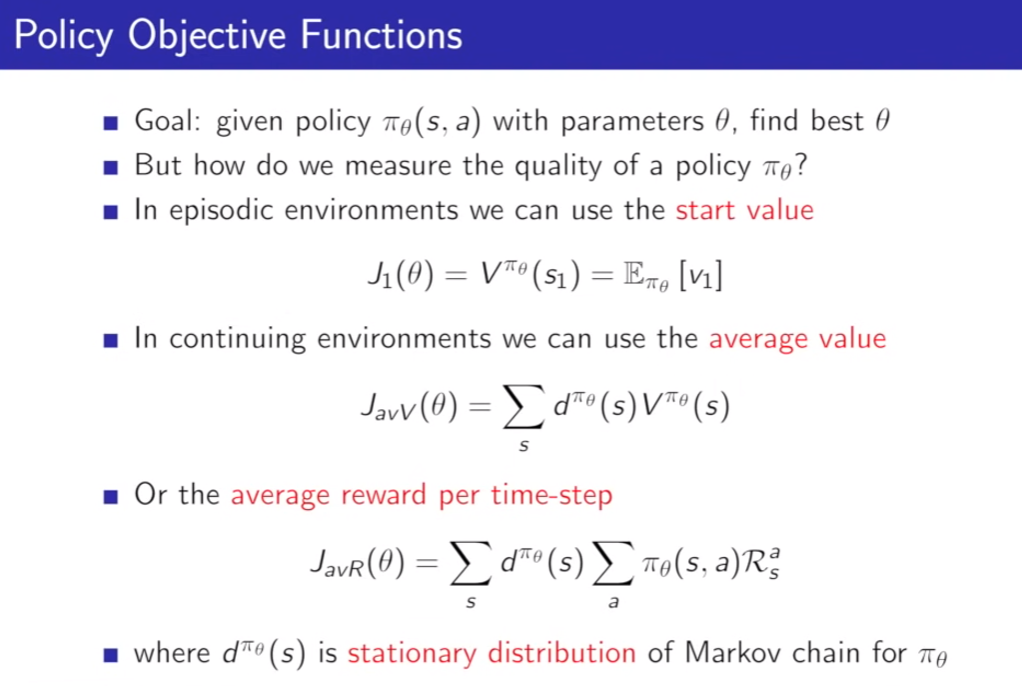
- how to optimize policy
- first : which start value reach to best
- second : average all rewards from each state
- third : some probability that Im in a state, some probability I'll take action from that state under my policy; immediate reward at that step
- you know gradient method will point to the direction how to do better in this MDP rather than try and error
2. Finite Difference Policy Gradient
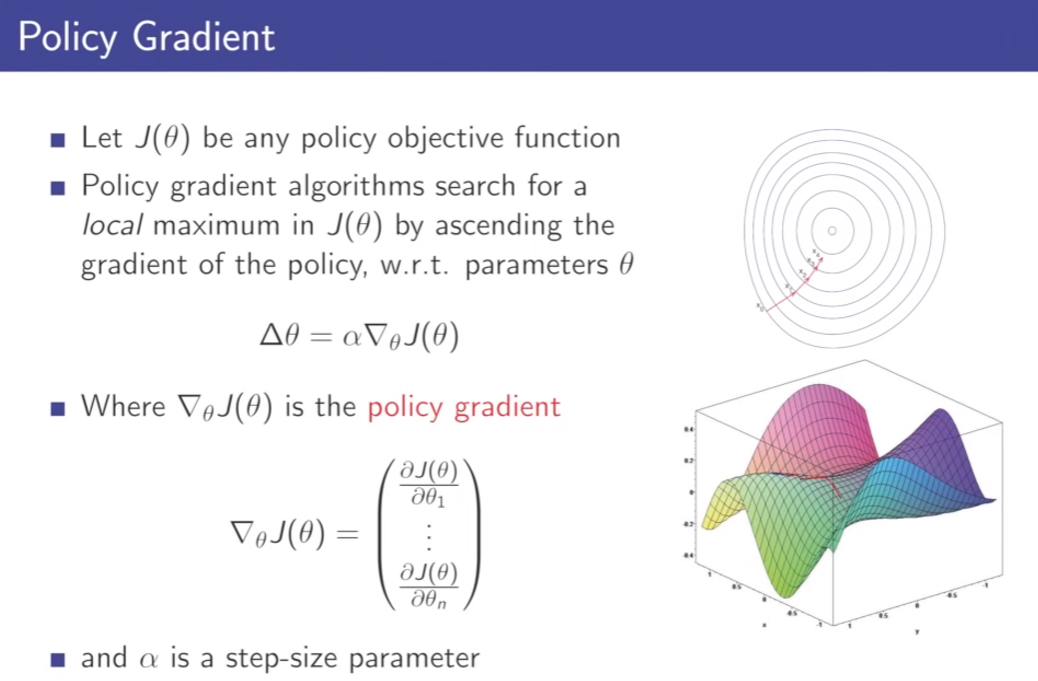
- we want to higher our objective function
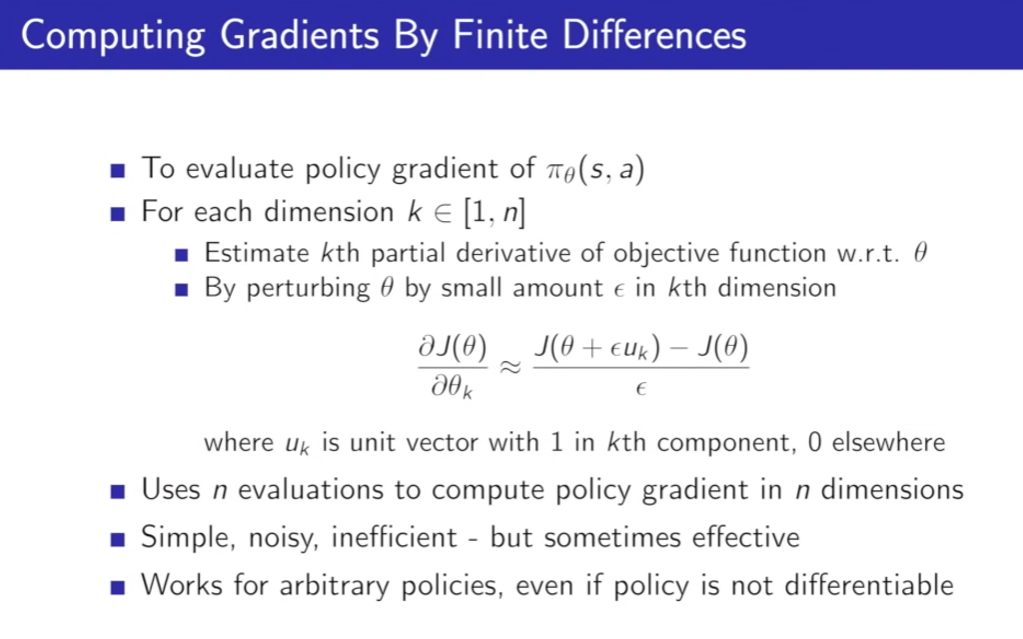
- this is naive numerical approch

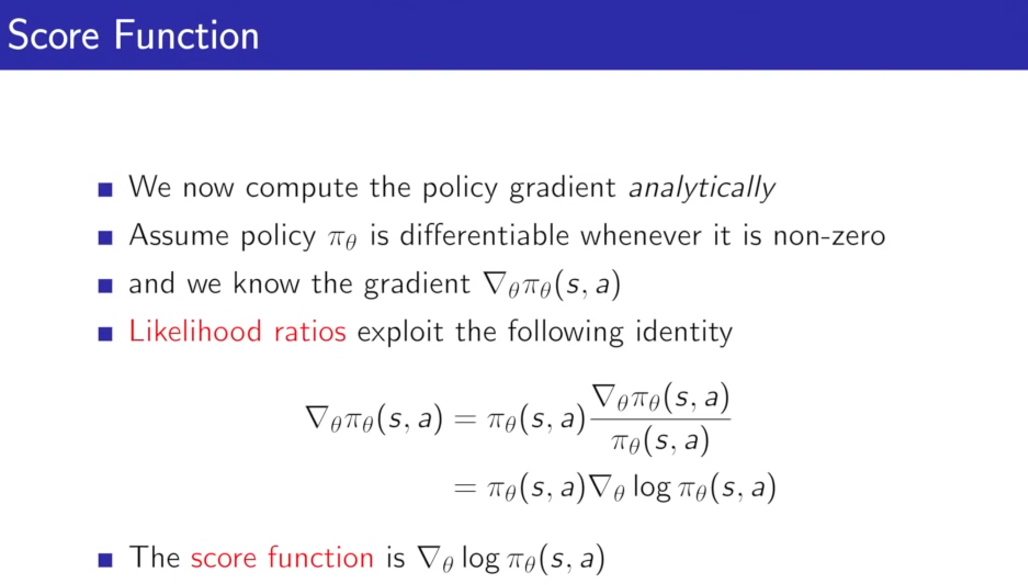
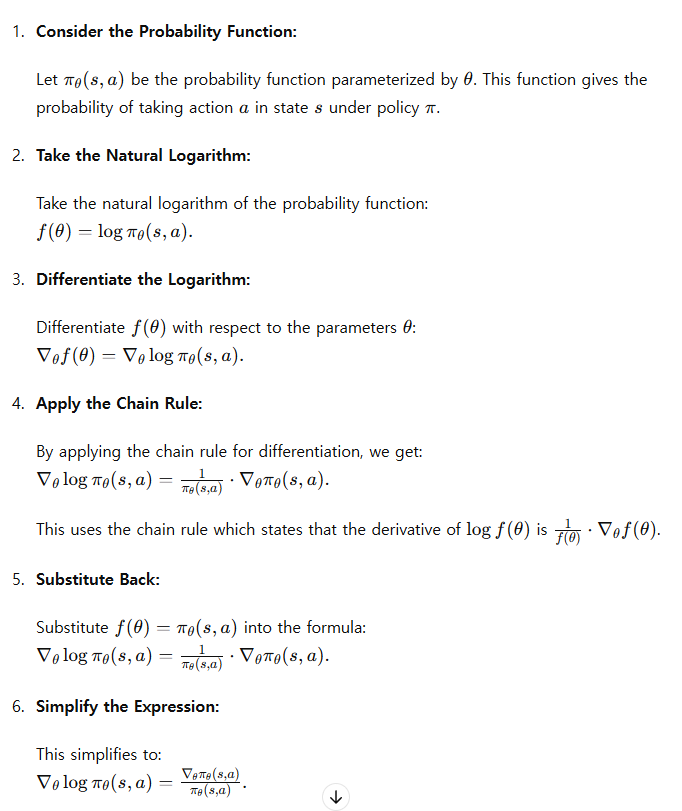
- We want to take the gradient of our policy
and want to take expectations of that thing- loglikelihood; we can multiply and devide by our policy without changing it
- gradient policy divided by the policy equal to the gradient of the log of the policy
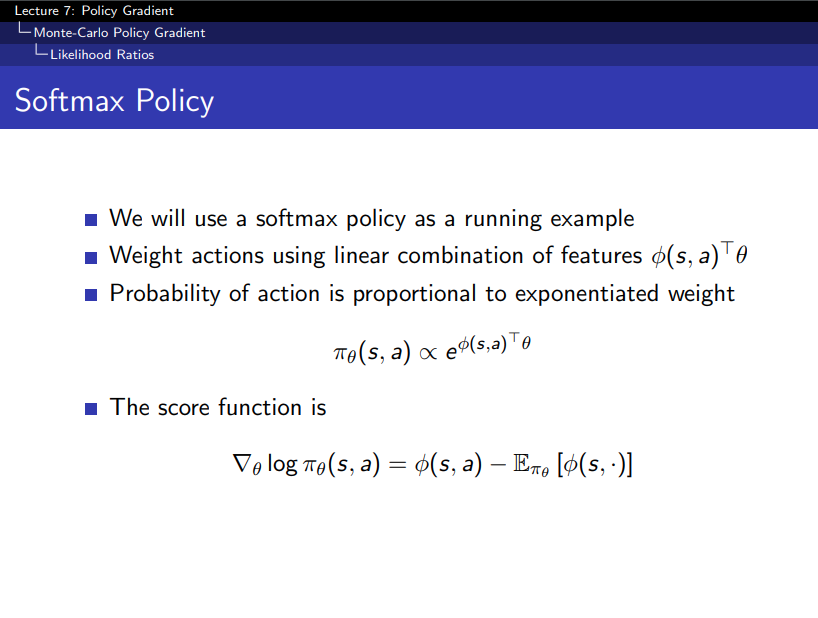
- discrete action
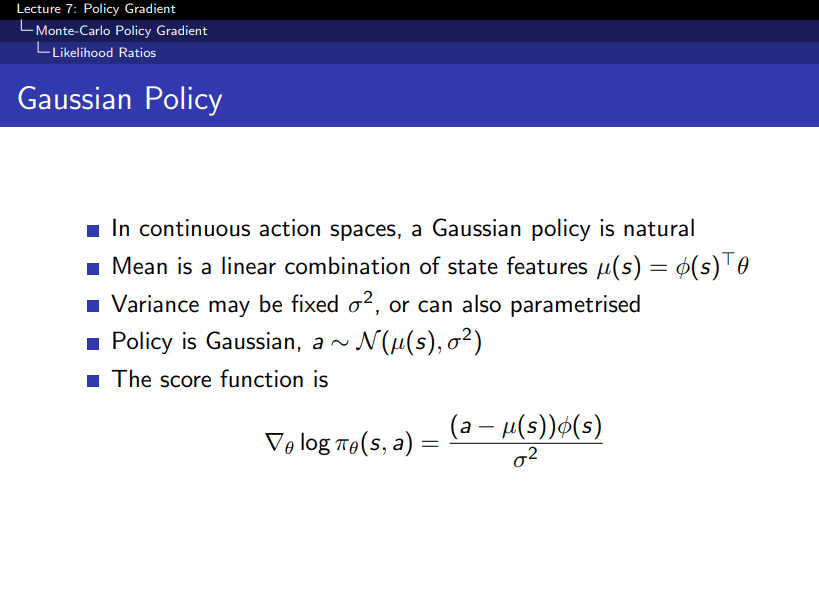
-continuous action space
- parameterize the mean of Gaussian
-
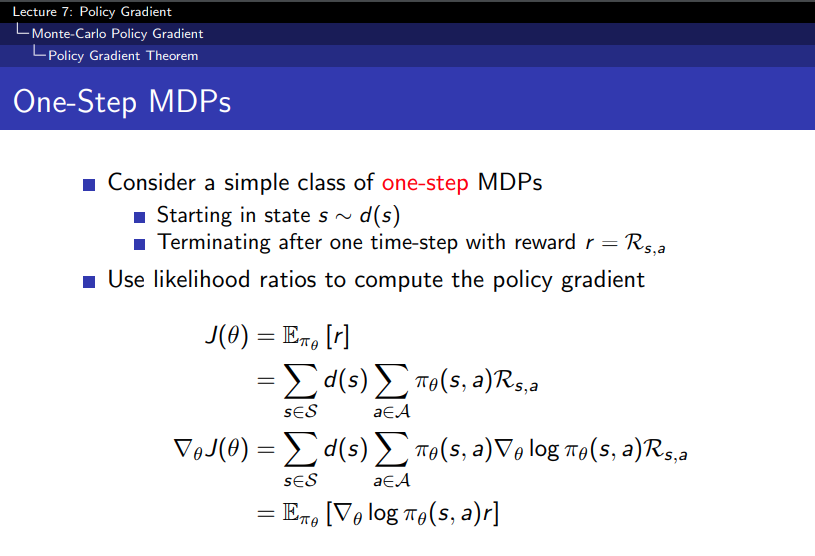
we take an action from a given state , we compute the gradient of this log policy , we multiply it by the immediate reward that we actually experienced
- gives us gradient step
- model free
-
how about multi step mdp?
-
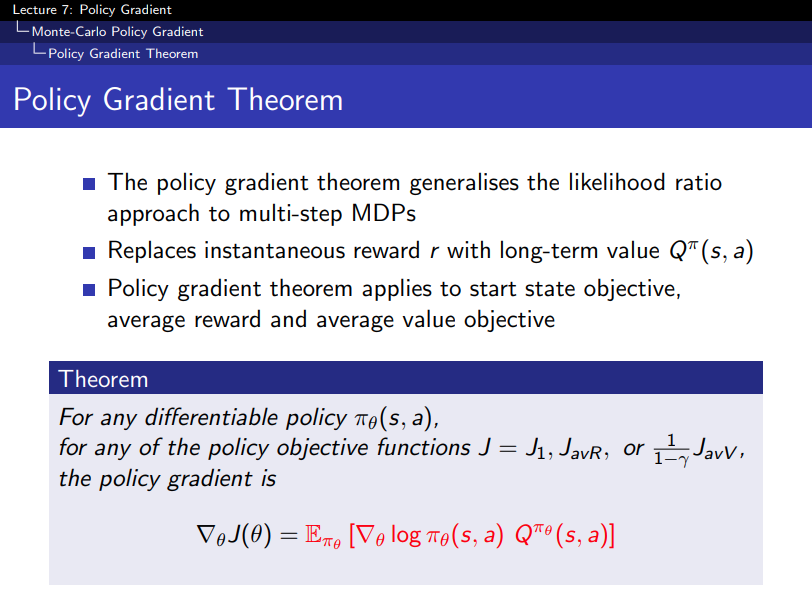
replace immediate reward with the value function (the long term reward)
-
policy objective function이 뭐던간에
- =
policy gradient는
- =
-
만약 Supervised learning이라면 Value function이 없고 adjusting major policy to the direction of what teacher tells you
3. Monte-Carlo Policy Gradient
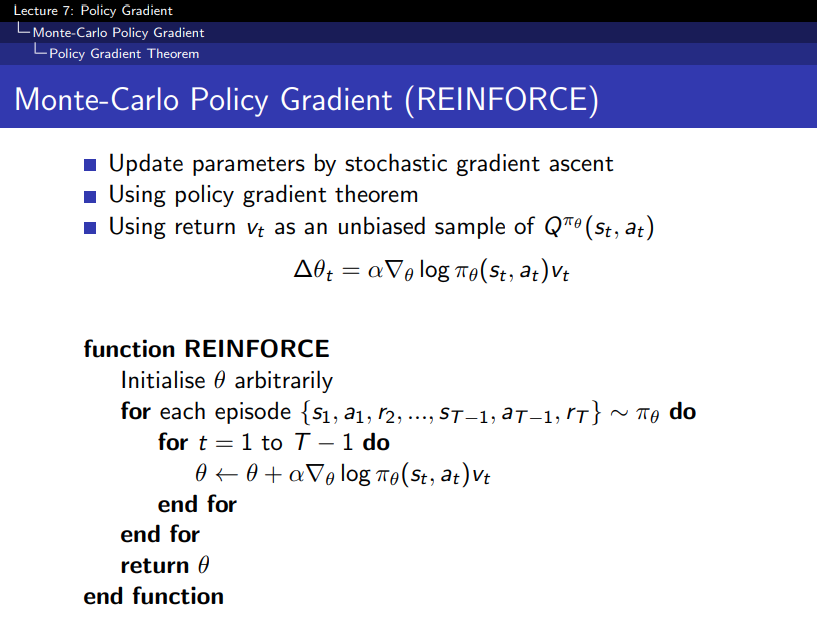
- forward view algorithm
- Gt is the returned accumulated rewards from that time step on
-
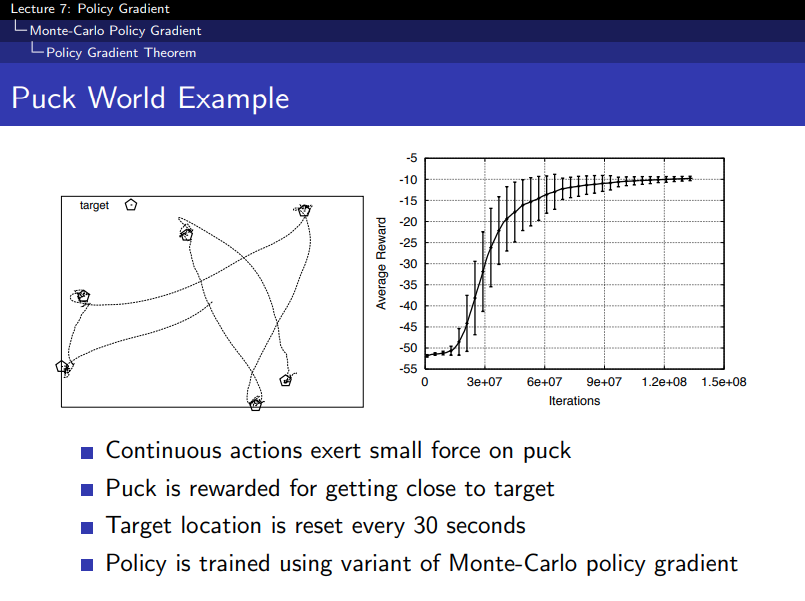
value based RL usually more jaggy but its more smooth
-
slow and very high variance
-
rest of lecture learn what is more efficient way
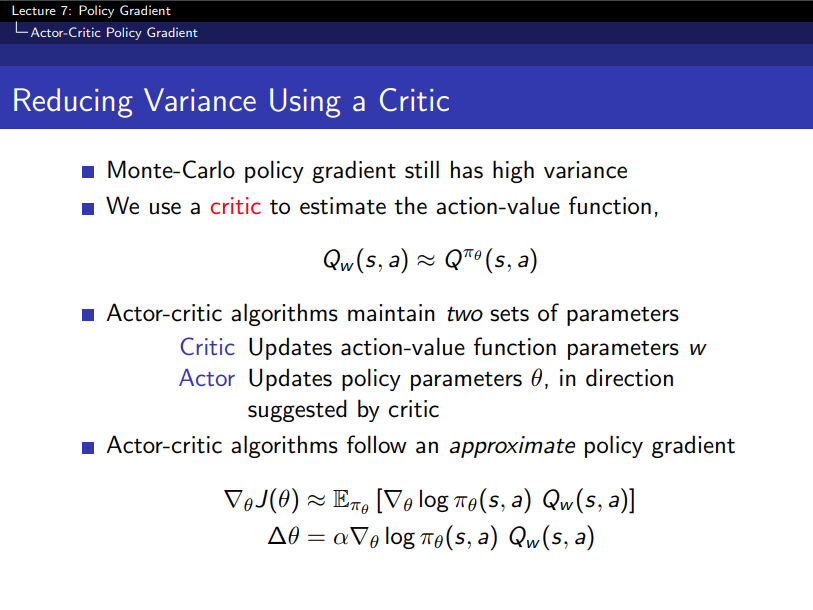
4. Actor-Critic Policy Gradient
-
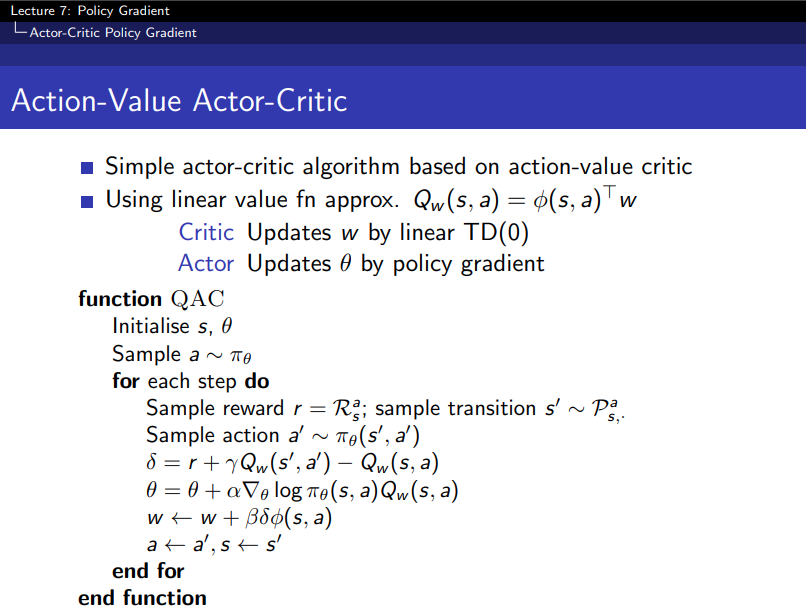
start off with a arbitrary policy and evaluate that policy using the critic and then instead of greedy policy improvement we're moving a gradient step in direction to get a better policy
-
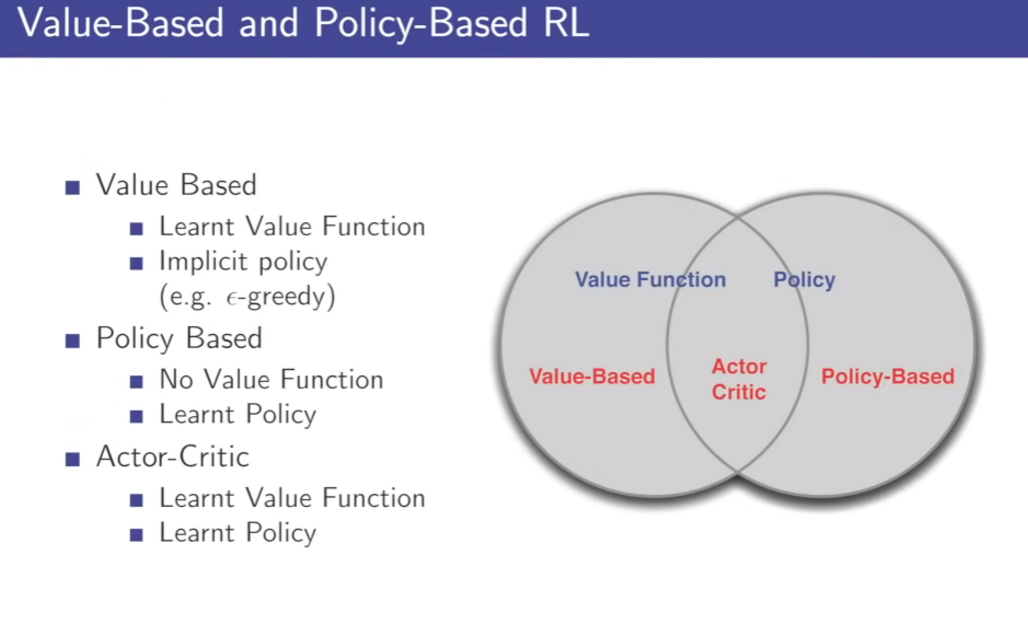
value-function - value based
-
policy - policy based
- both of them - actor-critic
-
파라미터를 reward많이 얻는 action을 선택하는 policy가 되도록 업데이트
