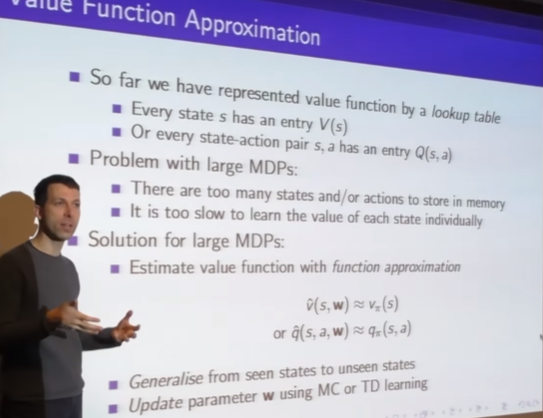
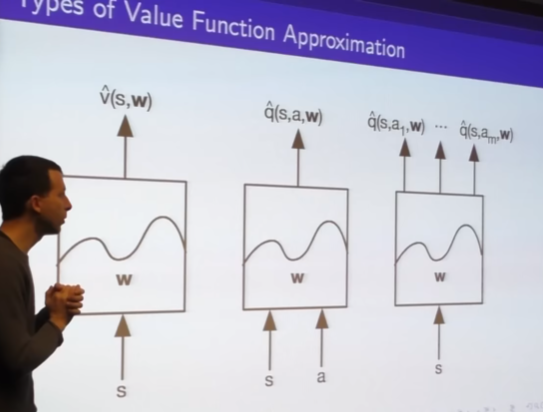
- variable function approximator
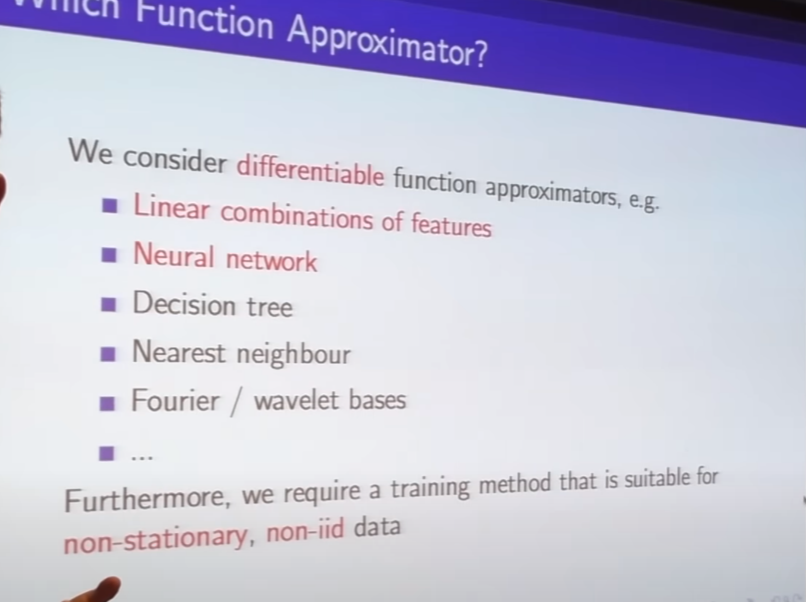
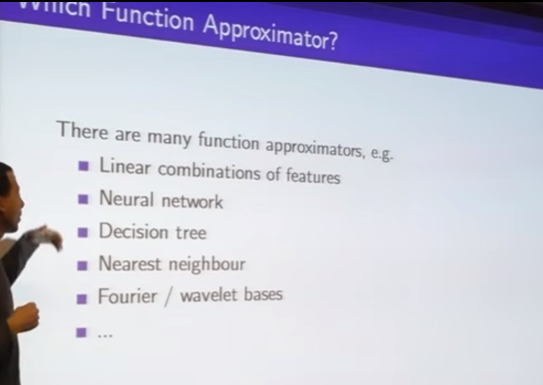
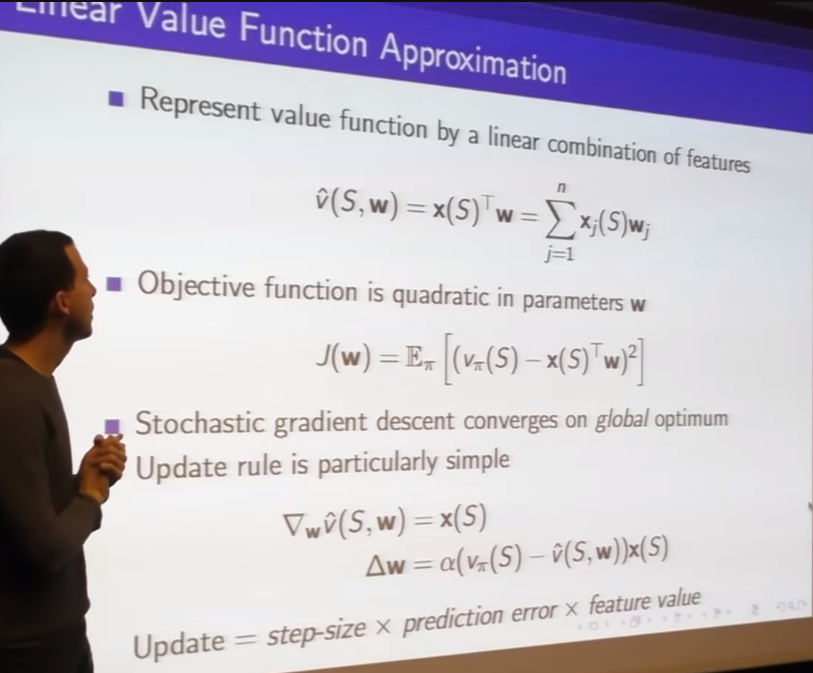
- focus on Linear combinations of features as canonical case
- also non linear combination like Neural network
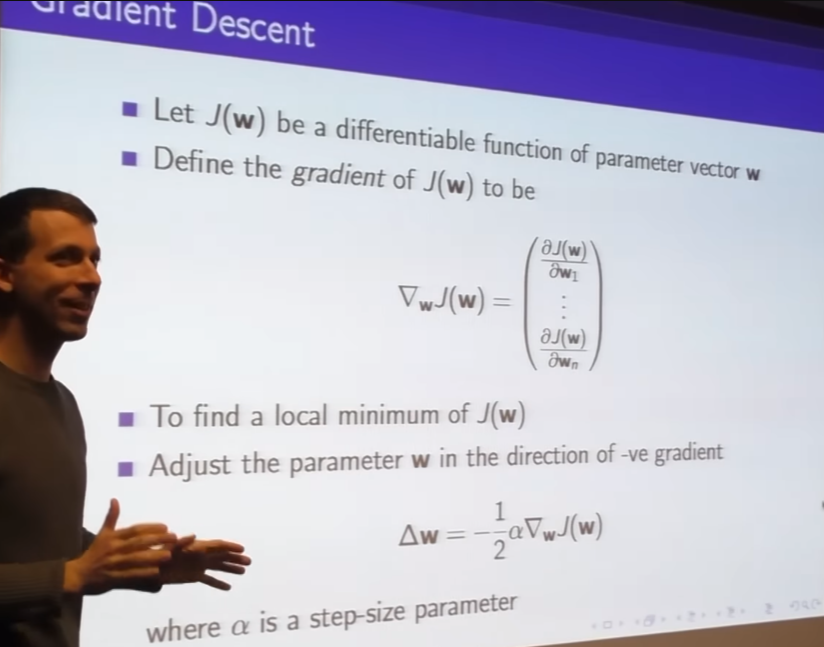
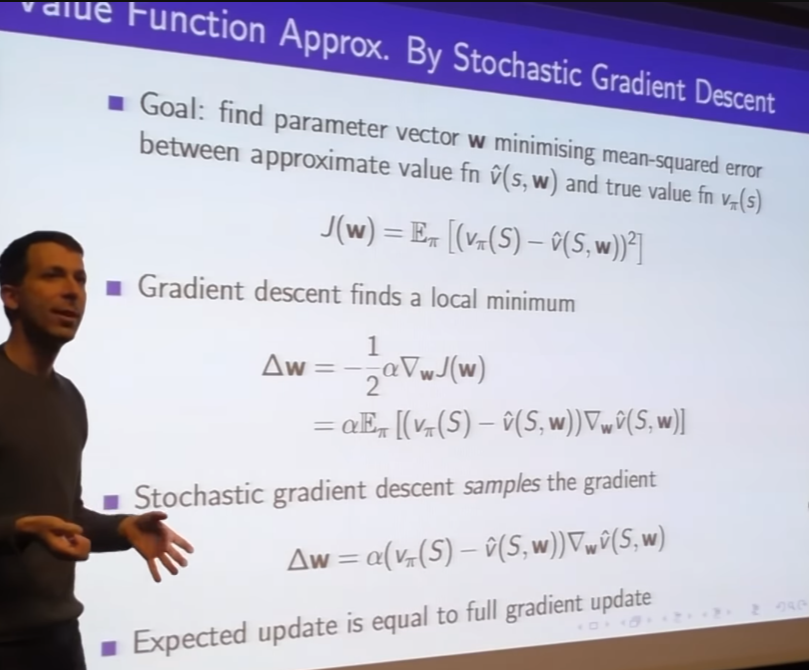
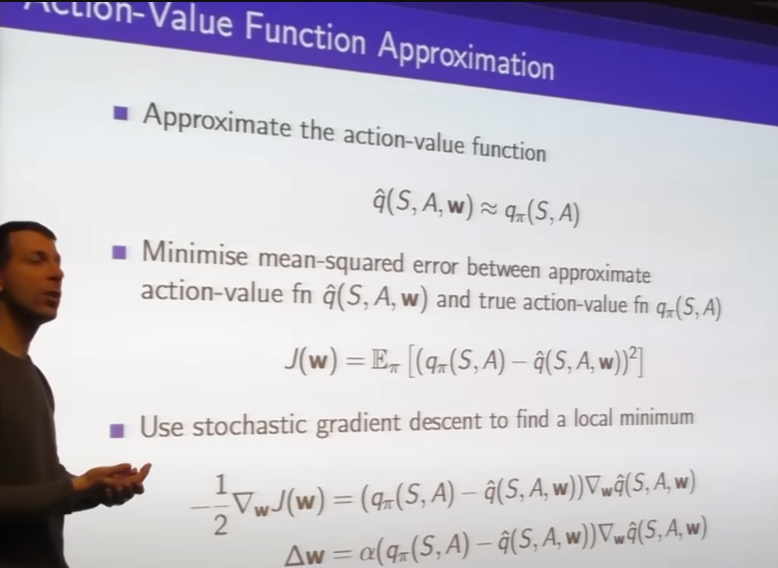
- if we know we would know the error term easily
- error is target to correct and gradient is how to correct
- minimize 평균 제곱 오차Mean squared error

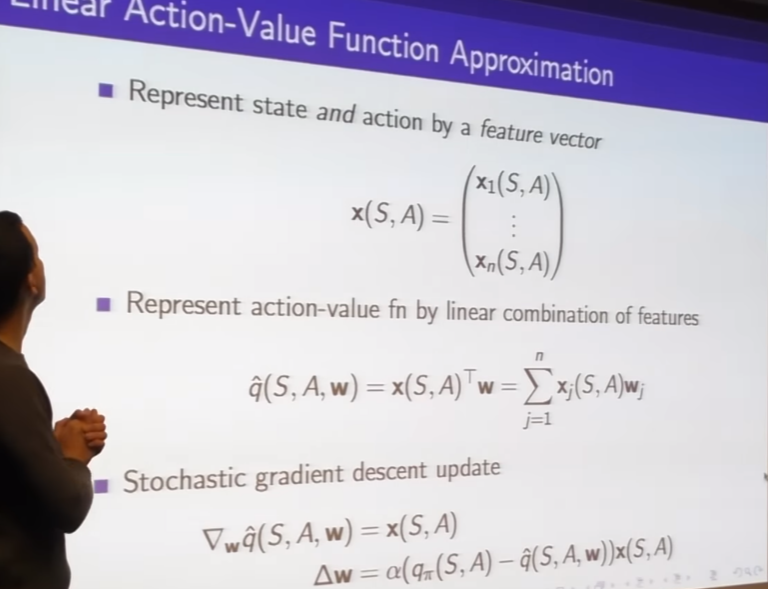
- feature vector
- collect of these feature vectors is kind of summarize what state condition is
-
Quadratic Equation이차방정식...
-
gradident is feature vectors
-
move your weights a little bit in the direction of the error multiplied by the feature vector
-
feature vector tells you how to correct
-
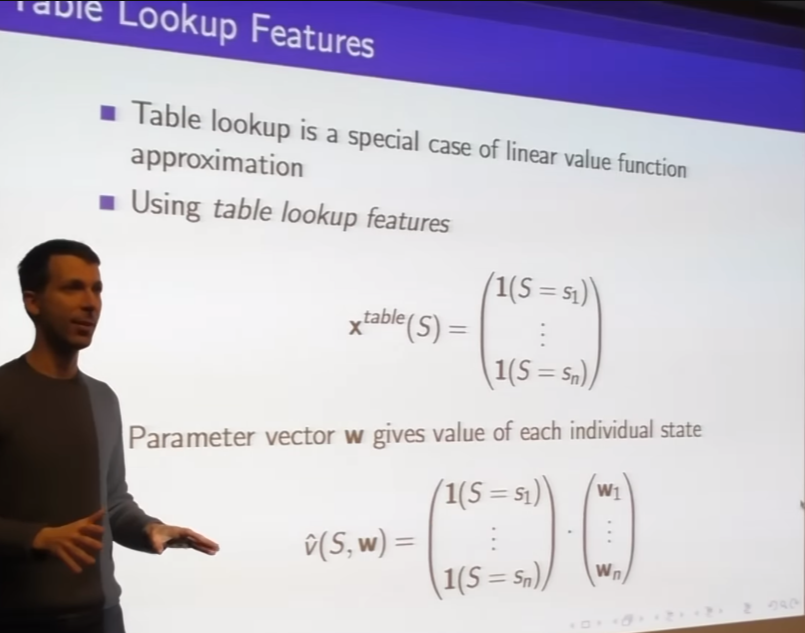
special cases for think about
-
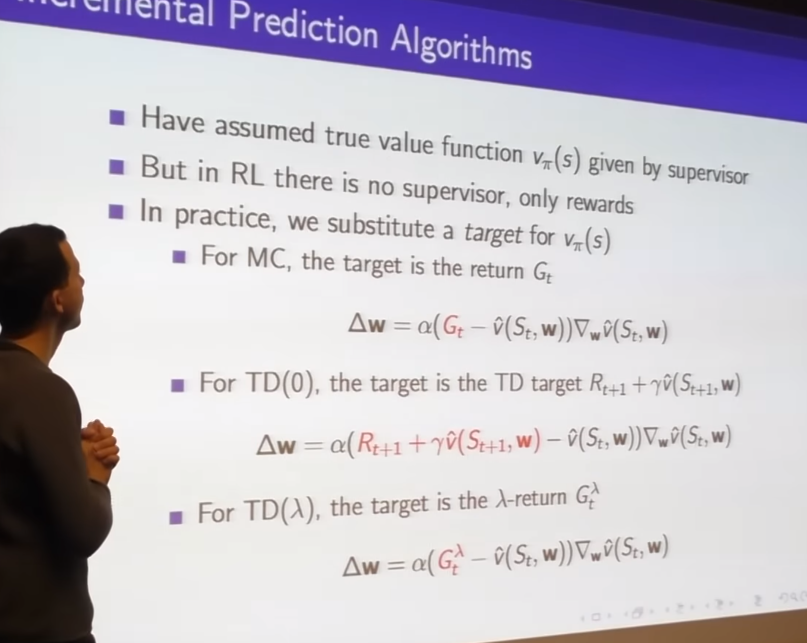
we cheated
- change our weight
- we're fitting our value vunction toward the returns, kind of supervisor learning on the returns
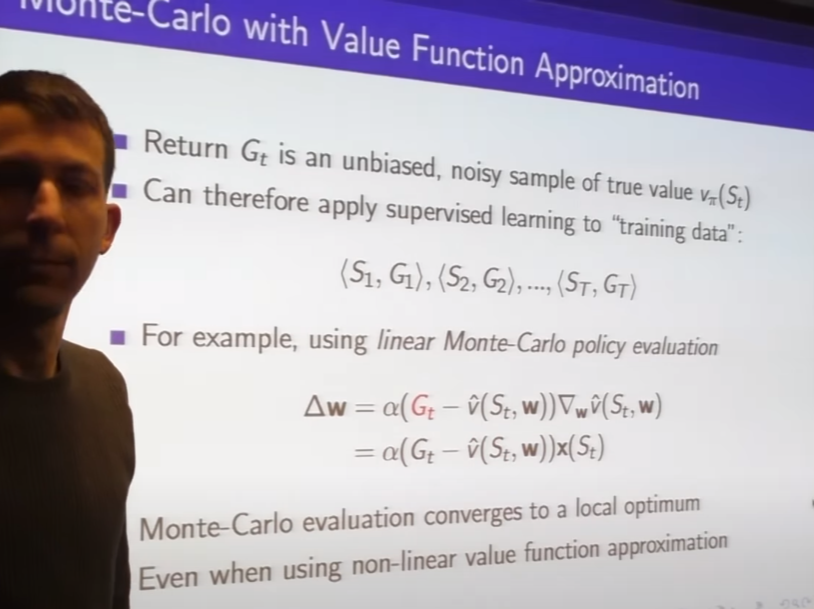
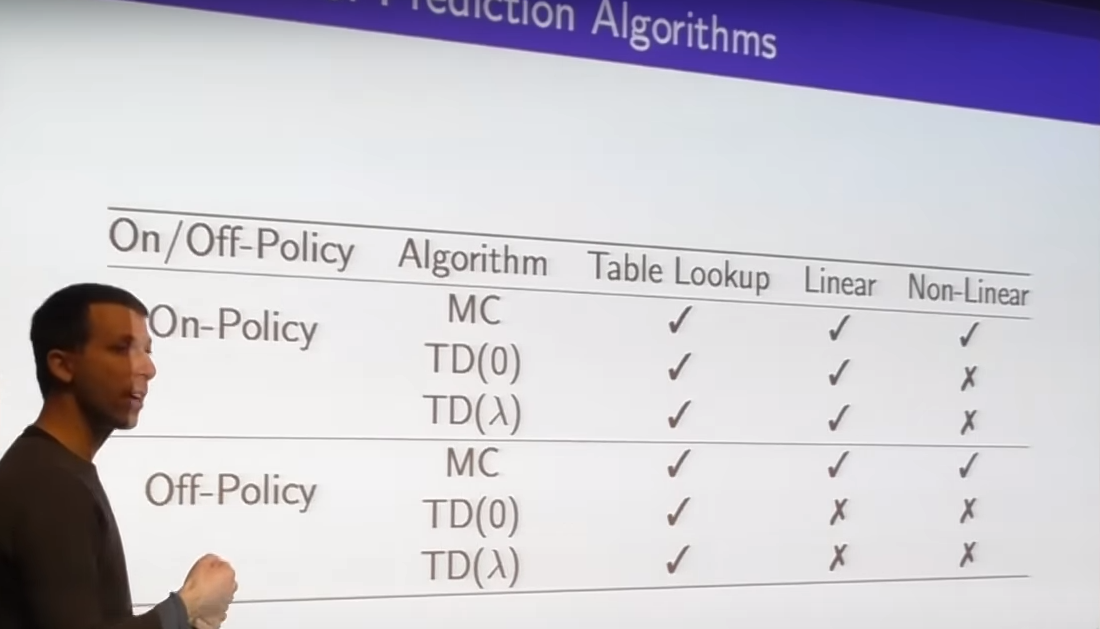
- even if we use non-linear value function approximation MC will converge to some local optimum or in the linear case it will find the global optimum
-
we get
- reward
- and query our own function approximator to estimate how much reward going to get for the rest of trajectory
- reward
-
we get
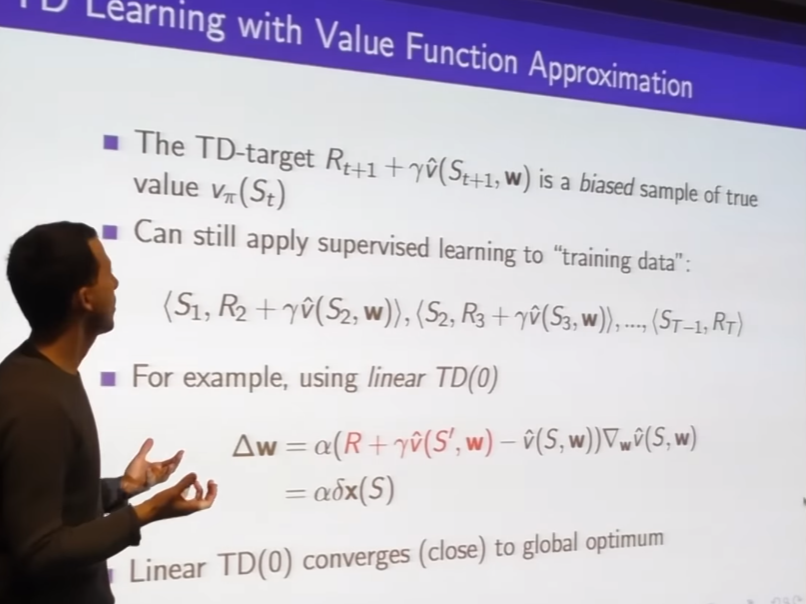
biased sample of true alue -
TD target : one step estimate
-
=
- step size
- the error between what I thought the value was going to be and my one step estimate of the value
- gradient tells you how to adjust your function approximator
- step size
-
- stepsize x TD error x gradient(non-linear case) or feature vector(linear case)
Incremental online update
-
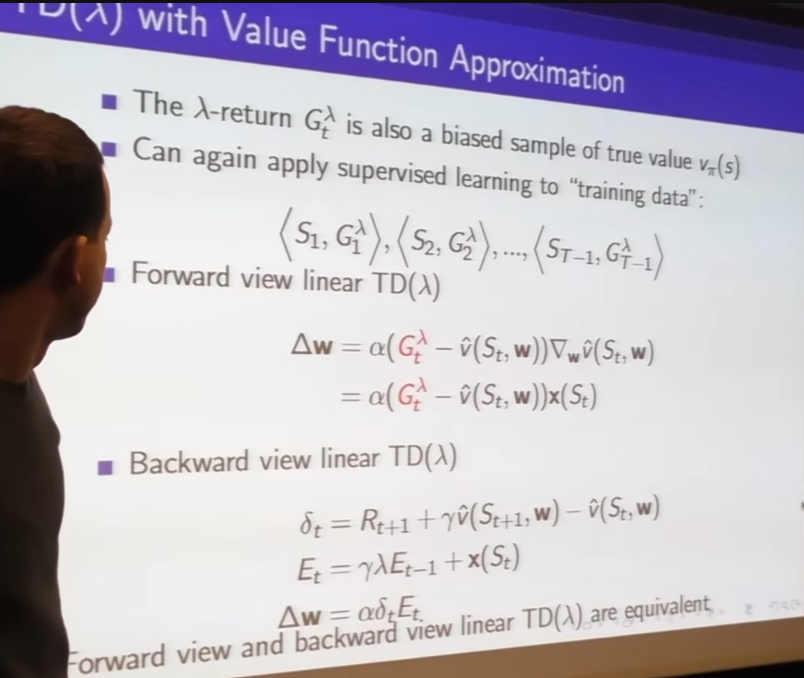
we online update with using eligibility traces
- eligibilities on the features(weights) of parameter vectors(size of your parameters not states)
so eligibility accumulating credit for things that happen most and happen recently
- eligibilities on the features(weights) of parameter vectors(size of your parameters not states)
-
- build features of both state and action
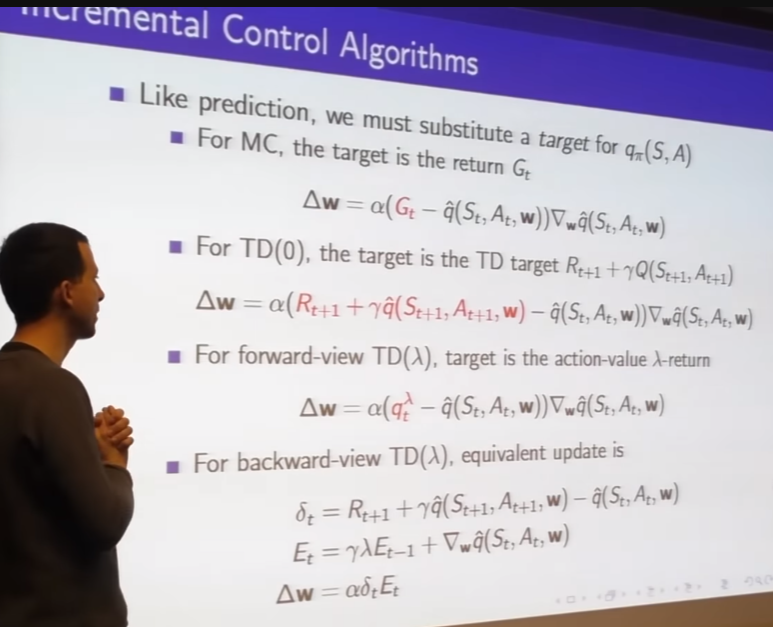
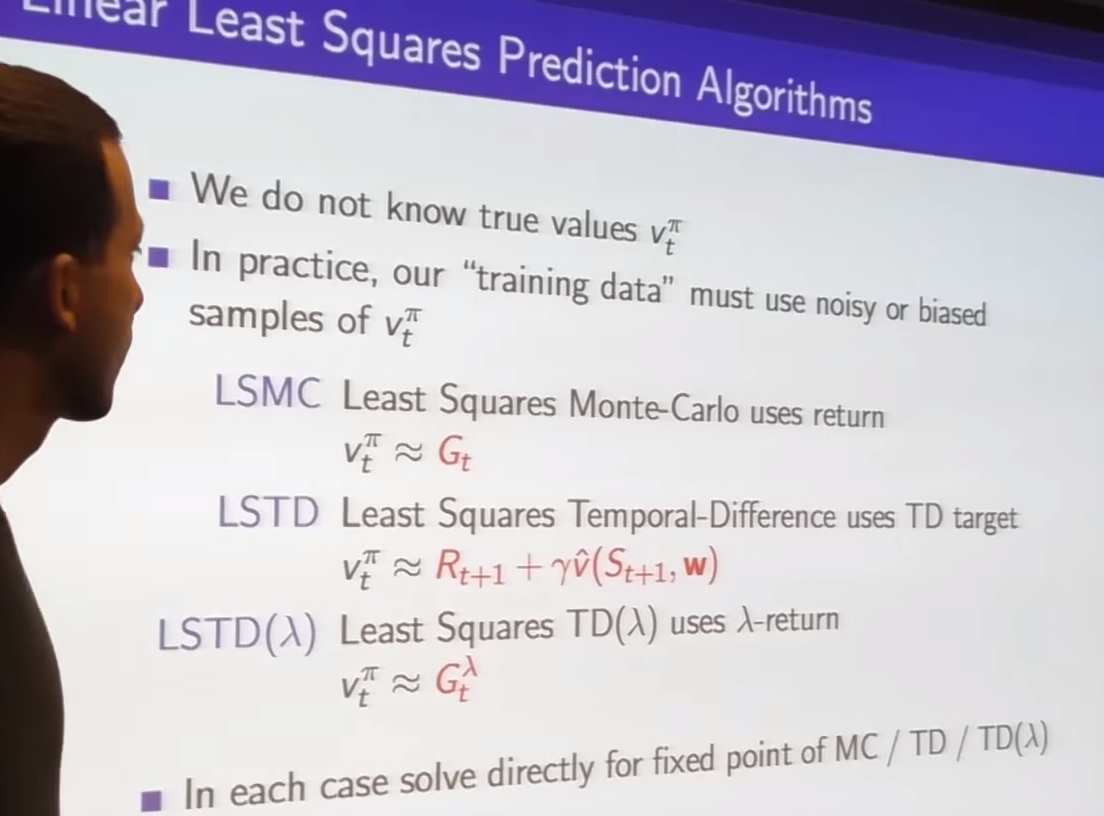
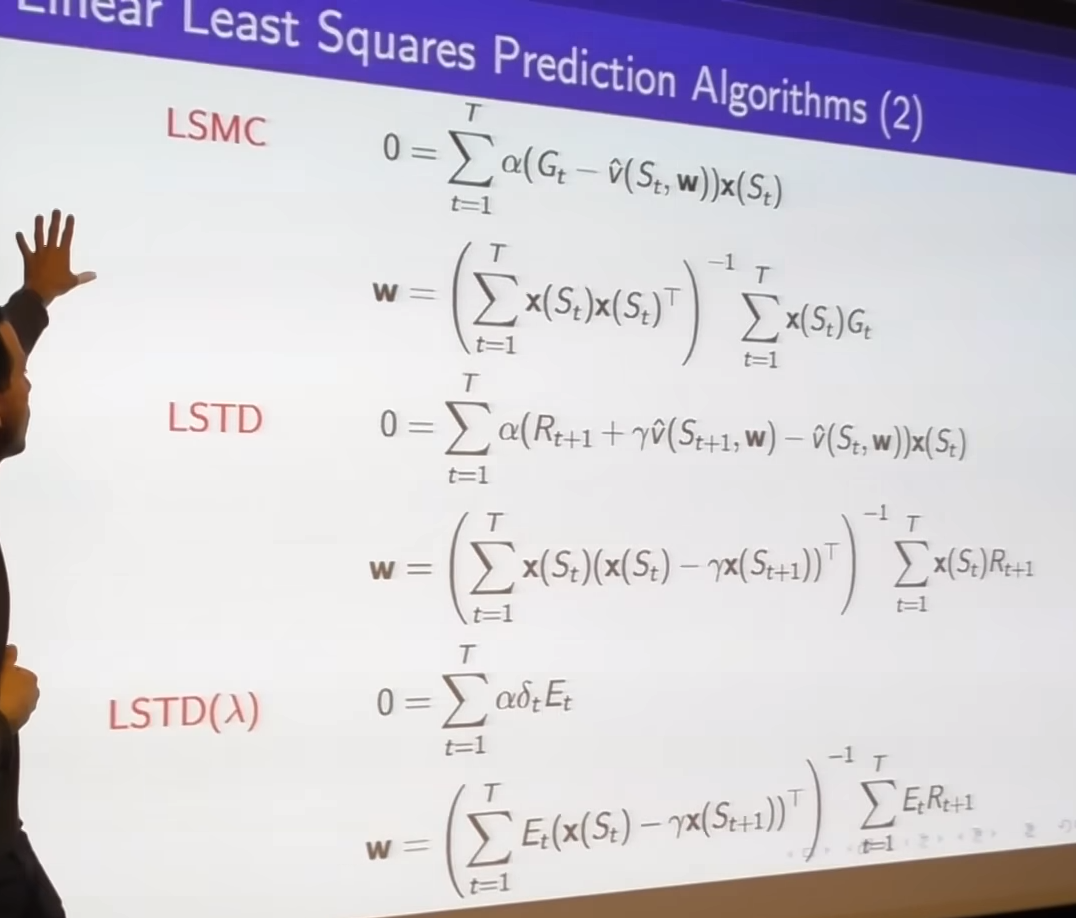
- if there is no Oracle(hypothetical perfect information source that can provide the true value or the optimal action in any given state)
- we can use return as a noisy unbiased estimate of the Oracle
- one-step TD target
- lambda return
- backward view TD lambda use eligibility traces
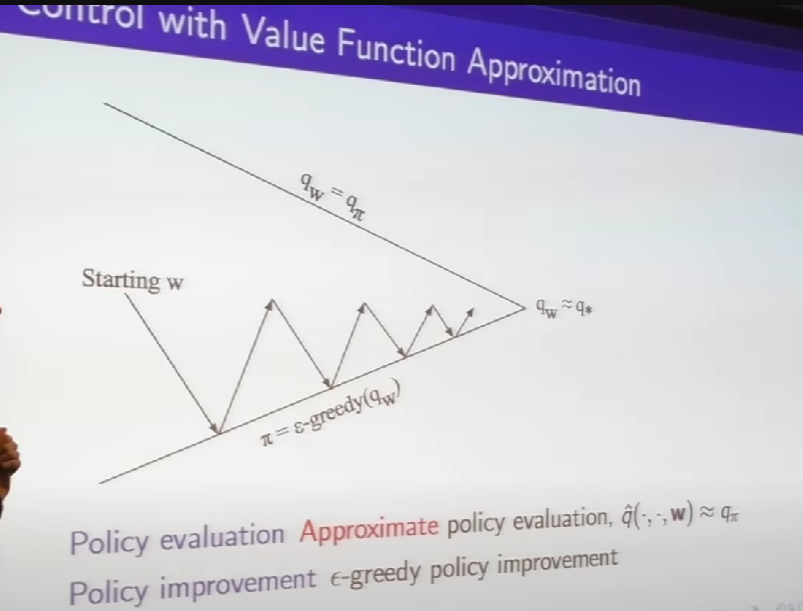
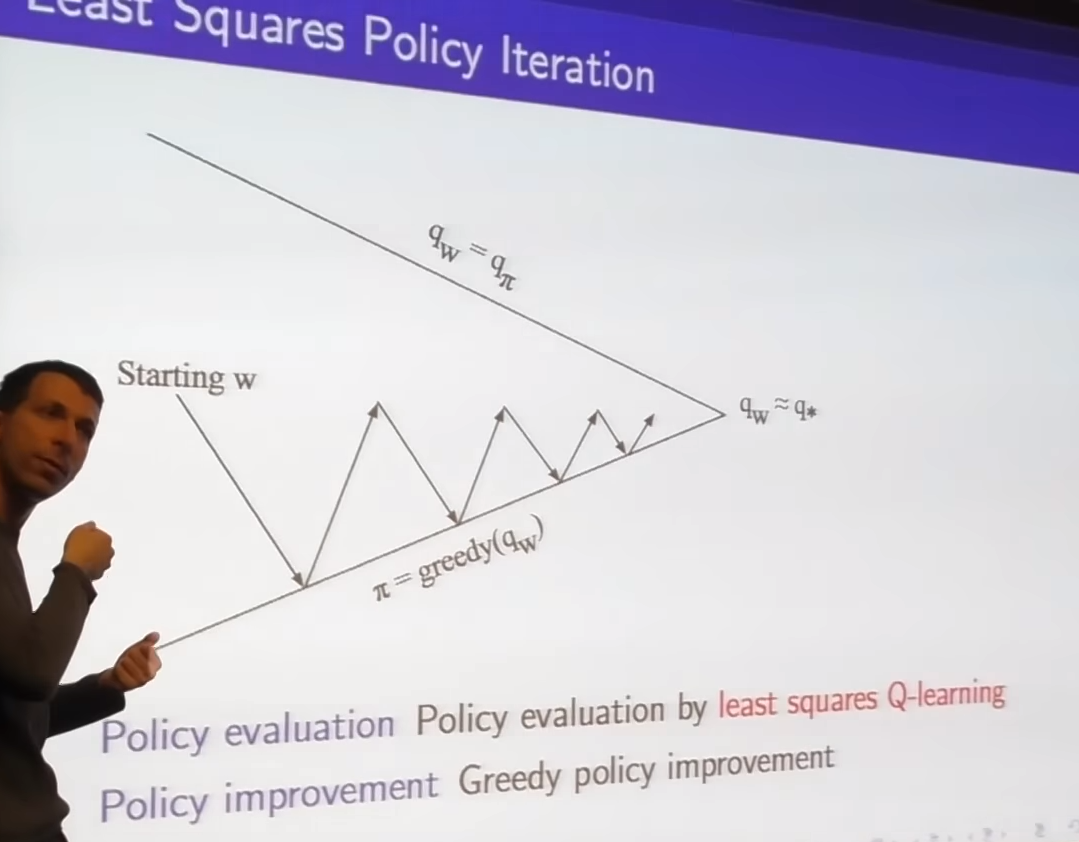
- difference is we using Q rather than V; so we can do control
- once we have q we can pick the max over our actions, we don't need model
- we can figure out what the next action we should take is and continue to do our policy improvement step
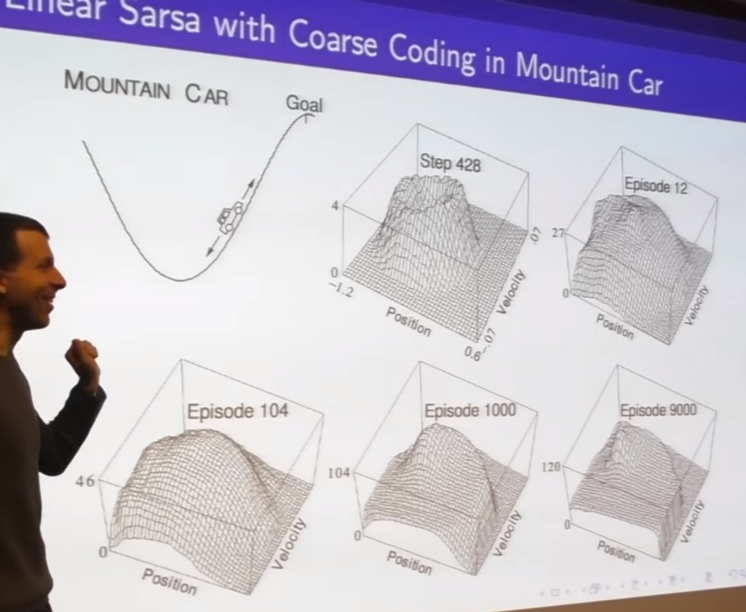
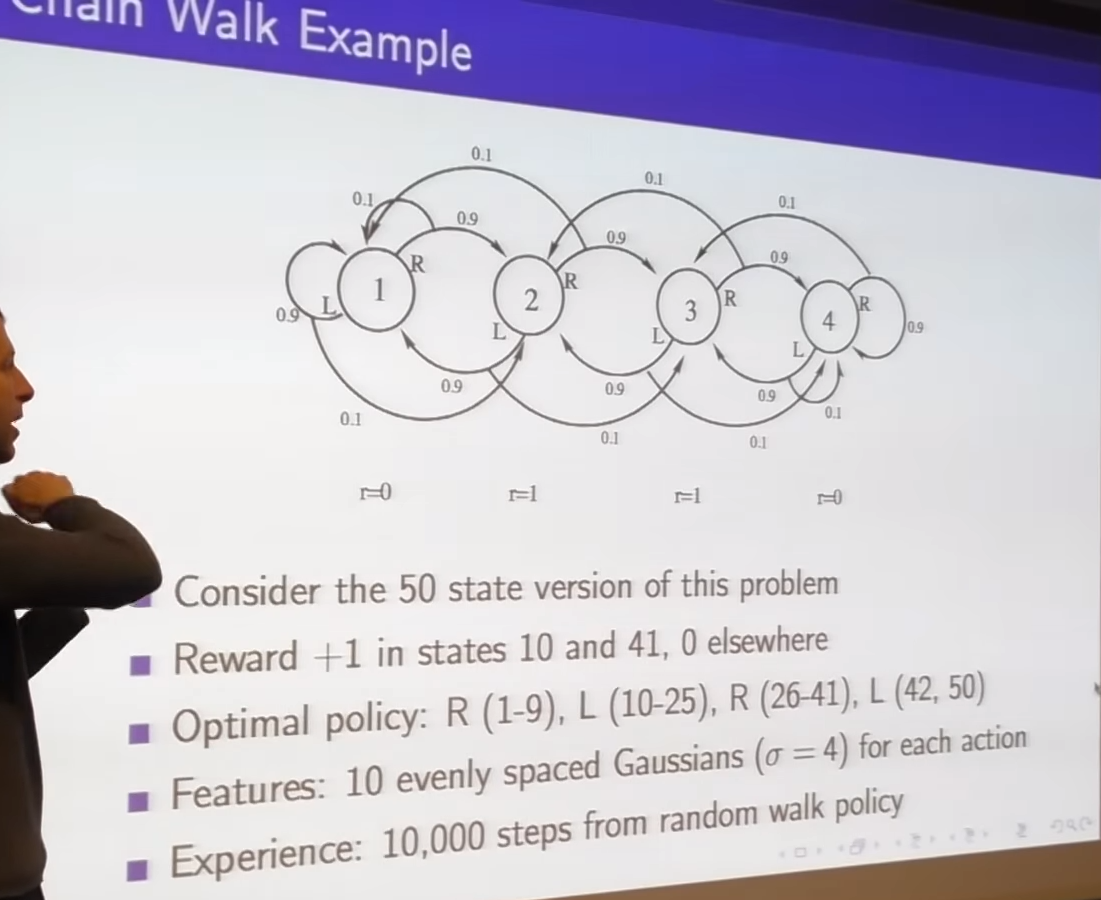
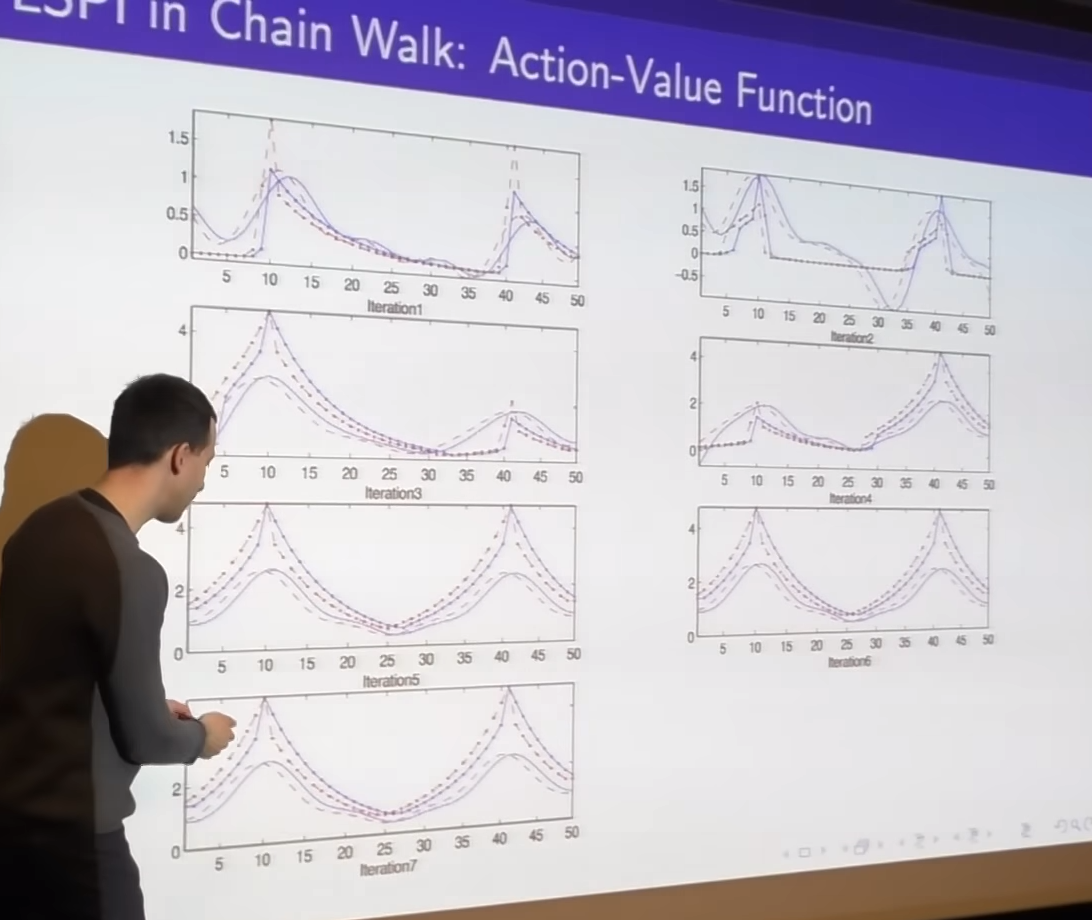
- simple function approximator is sufficient to express quite a complicated shape in value function
-eventually
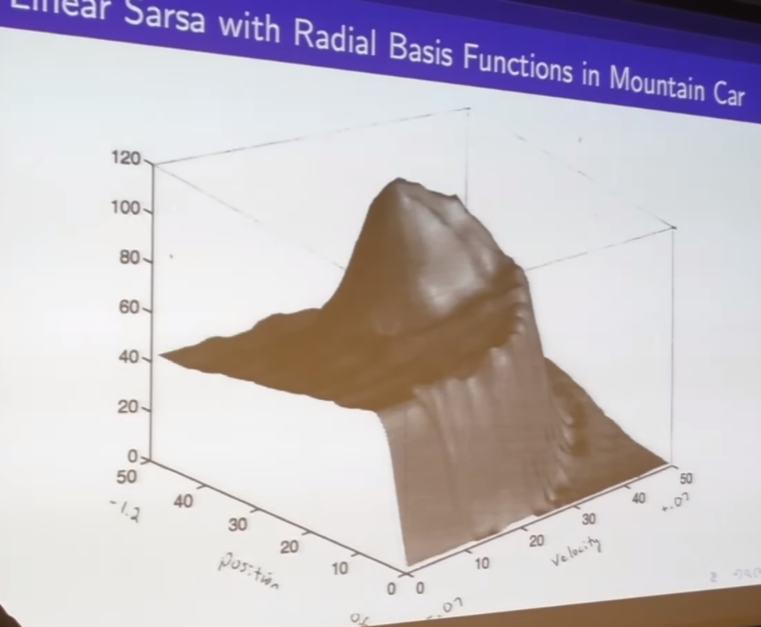
- radial based function approximator
- this is an approximation of the optimal vlue function for mounting car
continuos state space
action is discrete accelerate or not accelerate; amount of accelerate is given
-> could be continuous
- if you know good feature you can transform this complicate shape more simple one
- this is V but you can put knowledge in to help figure out this shape of V more effectively
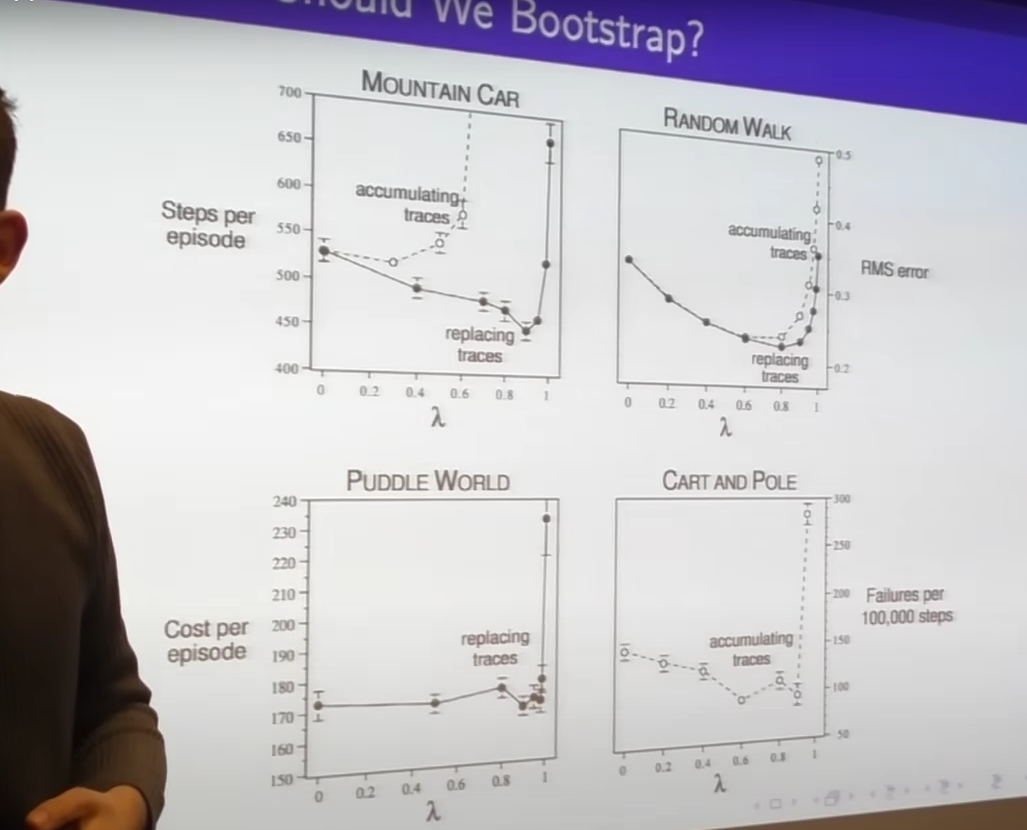
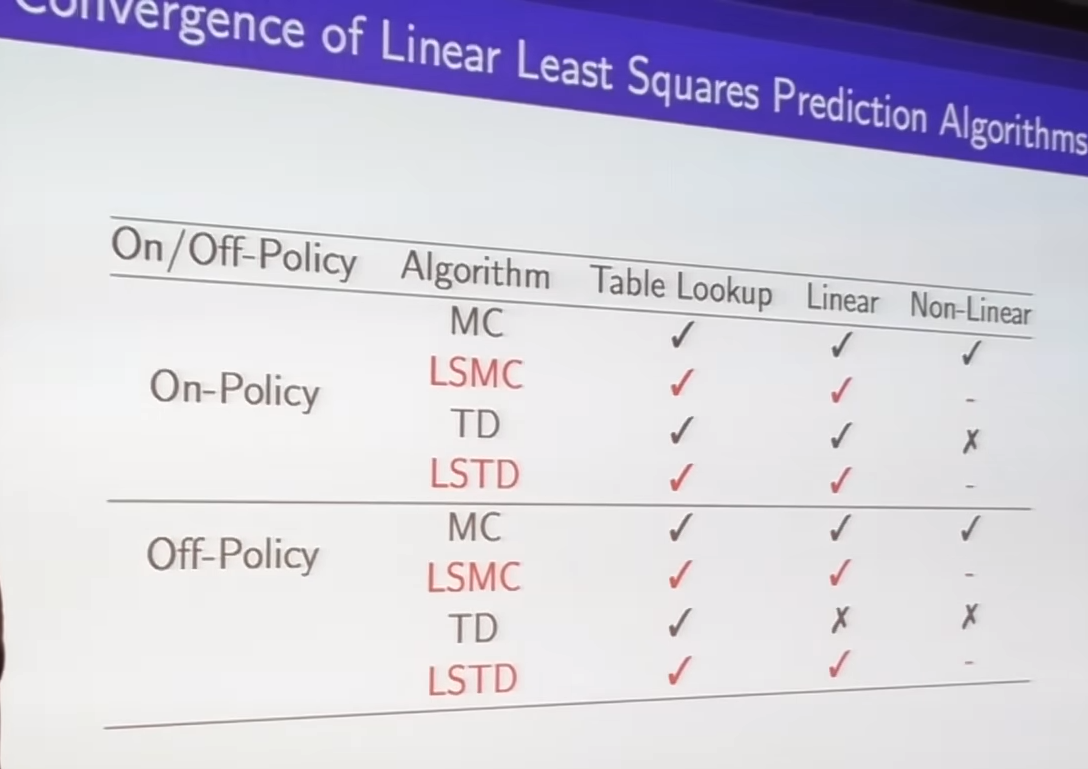
- typically TD0 is better than MC(very huge variance) and lambda is better TD0
- we have to find sweet spot between those
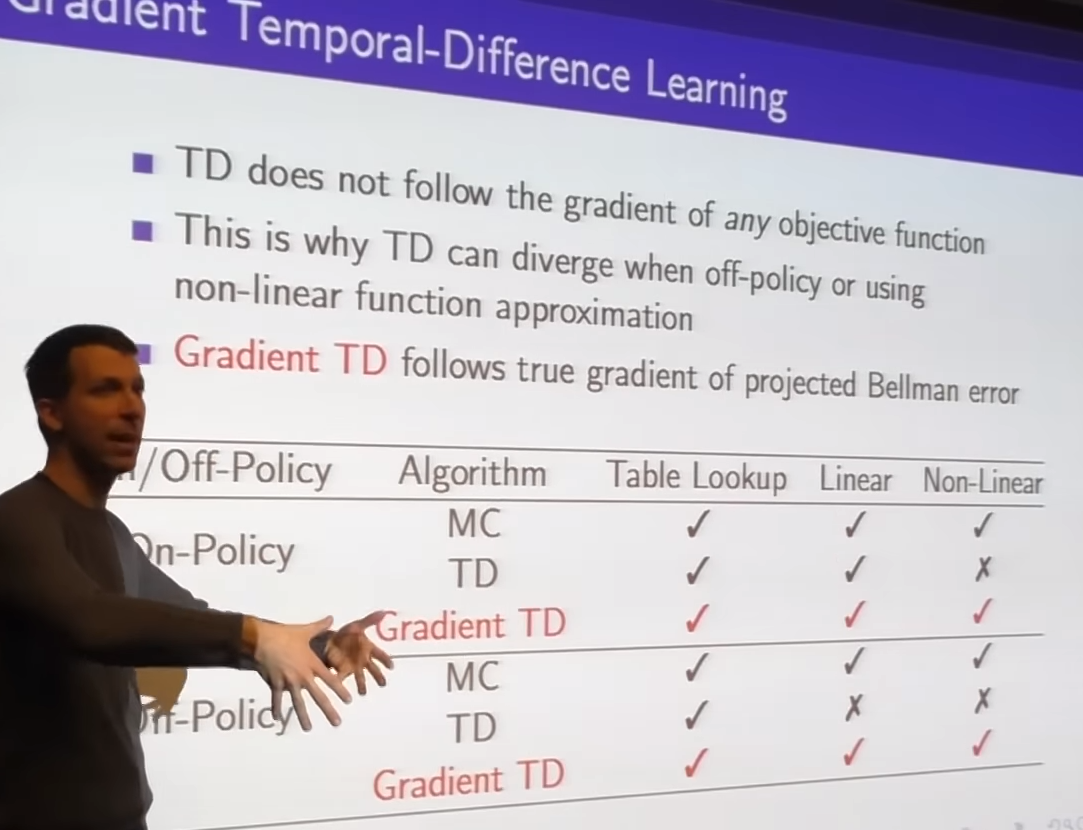
- finding algorithms effective when bootstrap
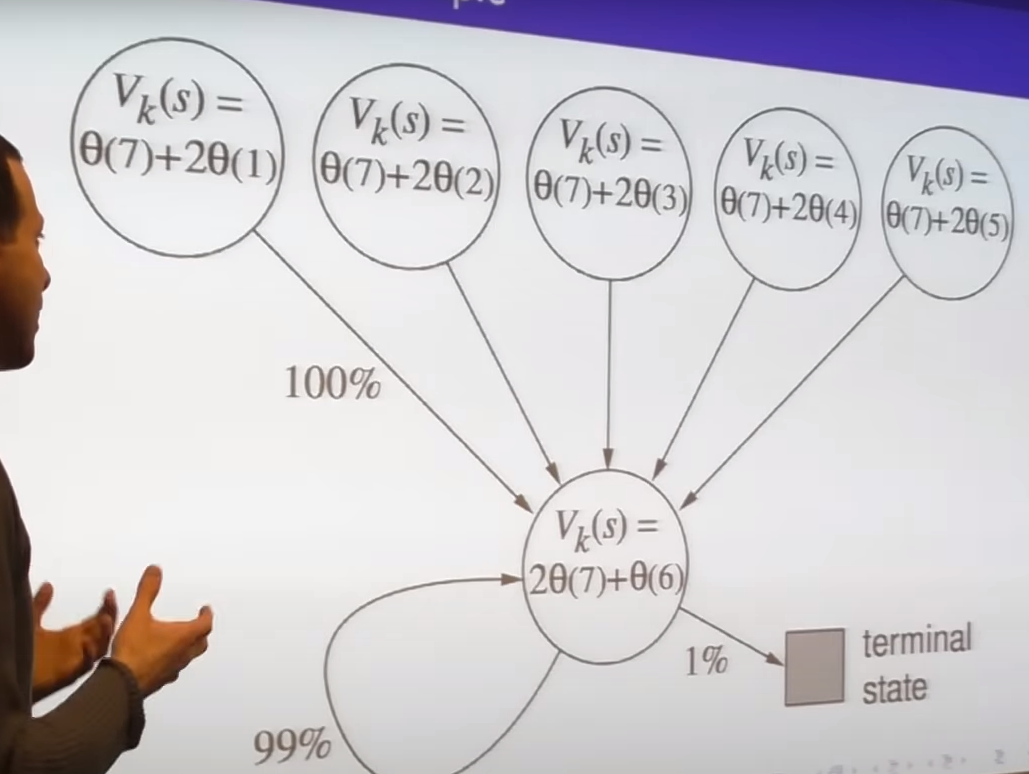
- simple MDP
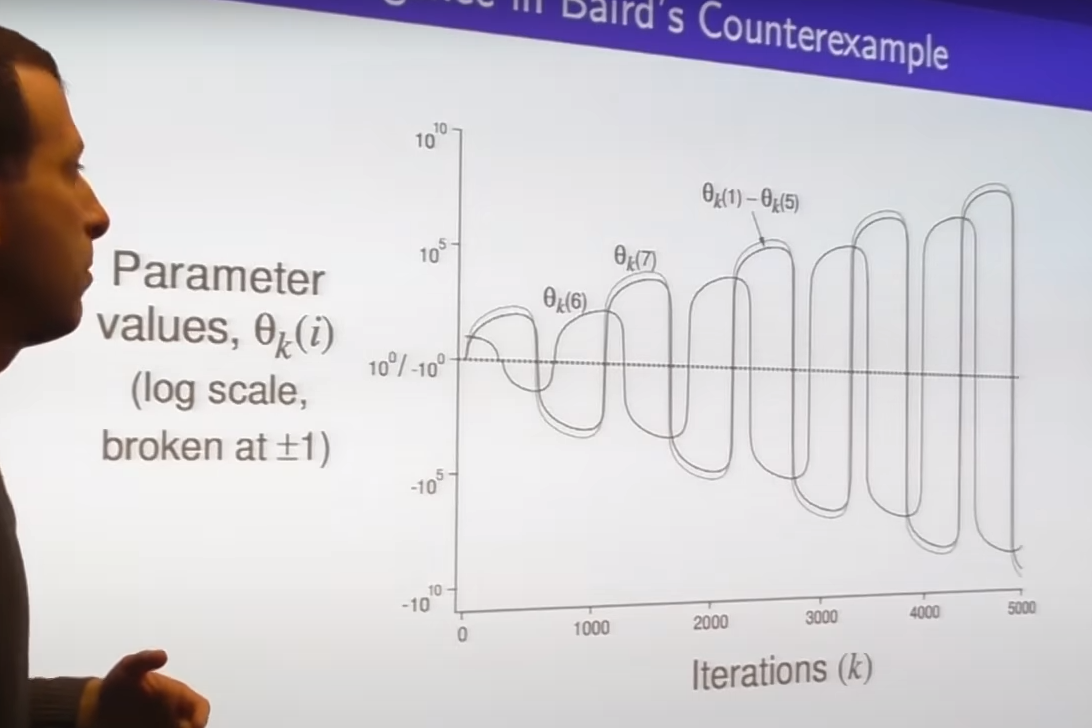
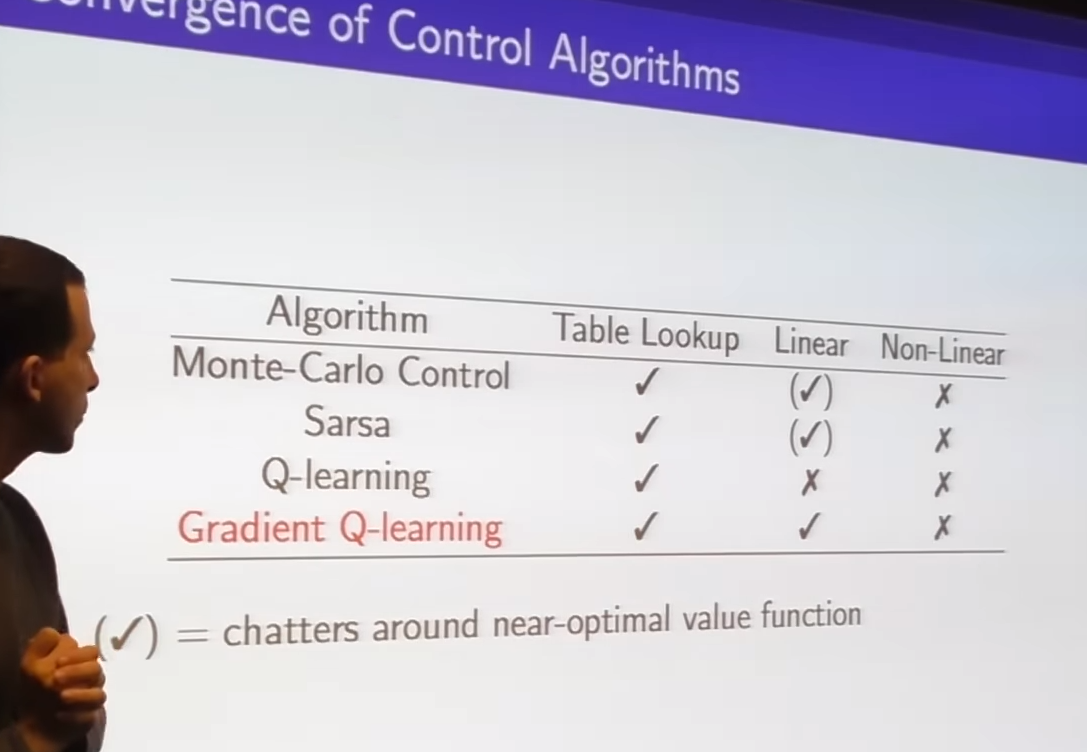
- blow up
- TD doesn't guarantee safety
-
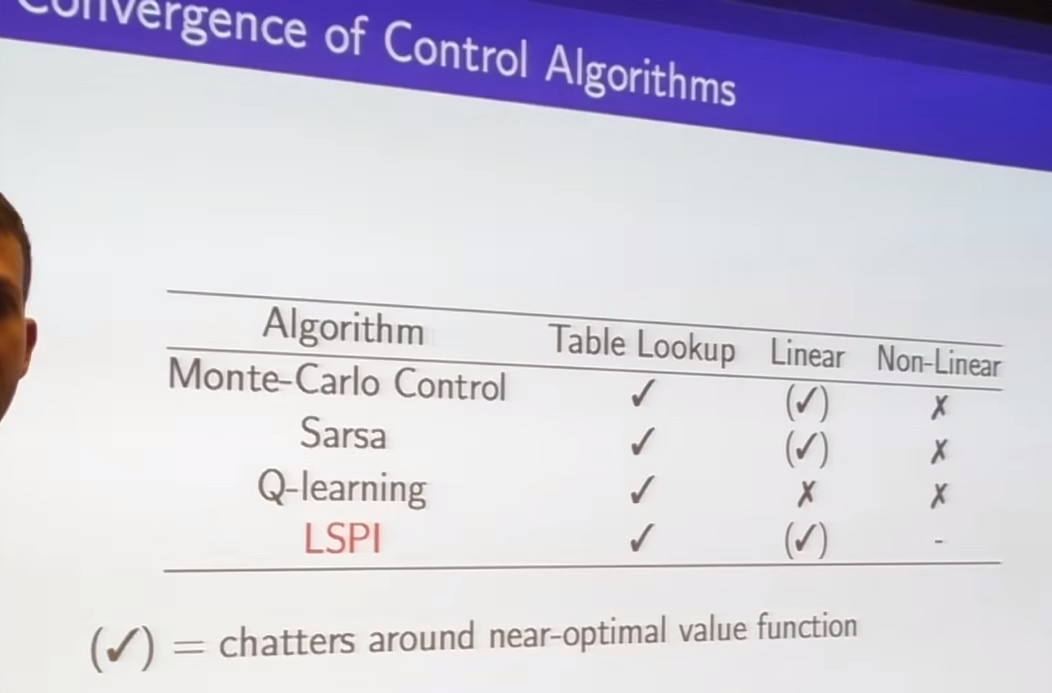
chattering - getting closer but occasionally stepping away but never shoot off to infinity
-
issue 1: is it converge to fixed point
-
issue 2: if converged is it right fixed point we want
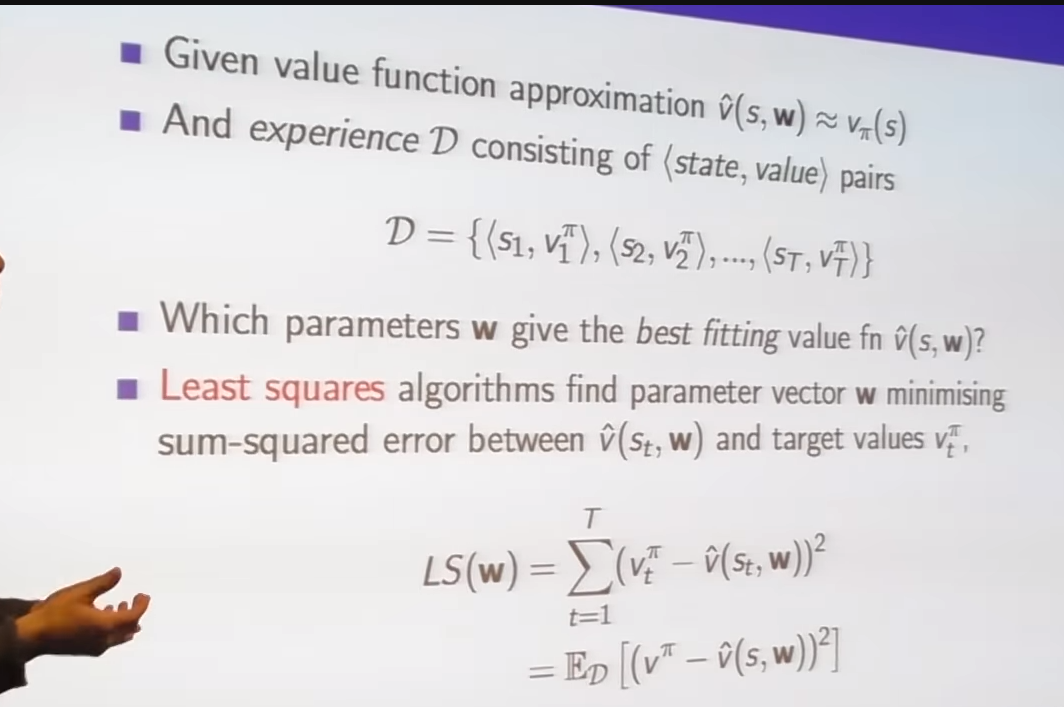
Batch Methods
-
minimize squared error between oracle value and what we thought would happen
-
least square solution

-
given state s we're going to sample from experience and oracle said I should do this
-
do one stochastic gradient update toward target
- standard supervised learning
- made dataset, randomly sample from that data, update in the direction of our random sample
-
just stochastic gradient descent update untill we get

- least square solution
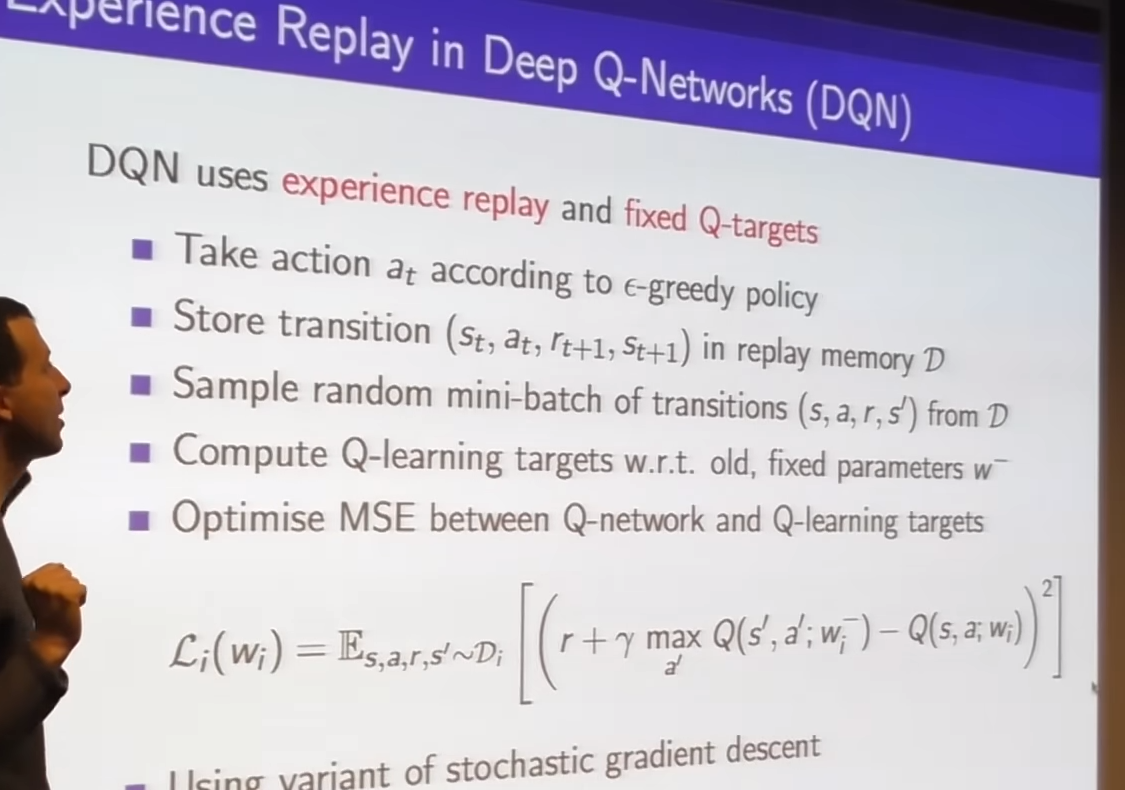
- sarsa and TD can blow up with neural networks however this method is stable with neural networks
- two tricks
- experience replay
- it decorrelates the trajectories
- bootstrap towards our frozen(from some steps ago) target
- do not bootstrap directly towards the thing which we're updating at that moment; lots of correlation between target and Q value that moment
- experience replay
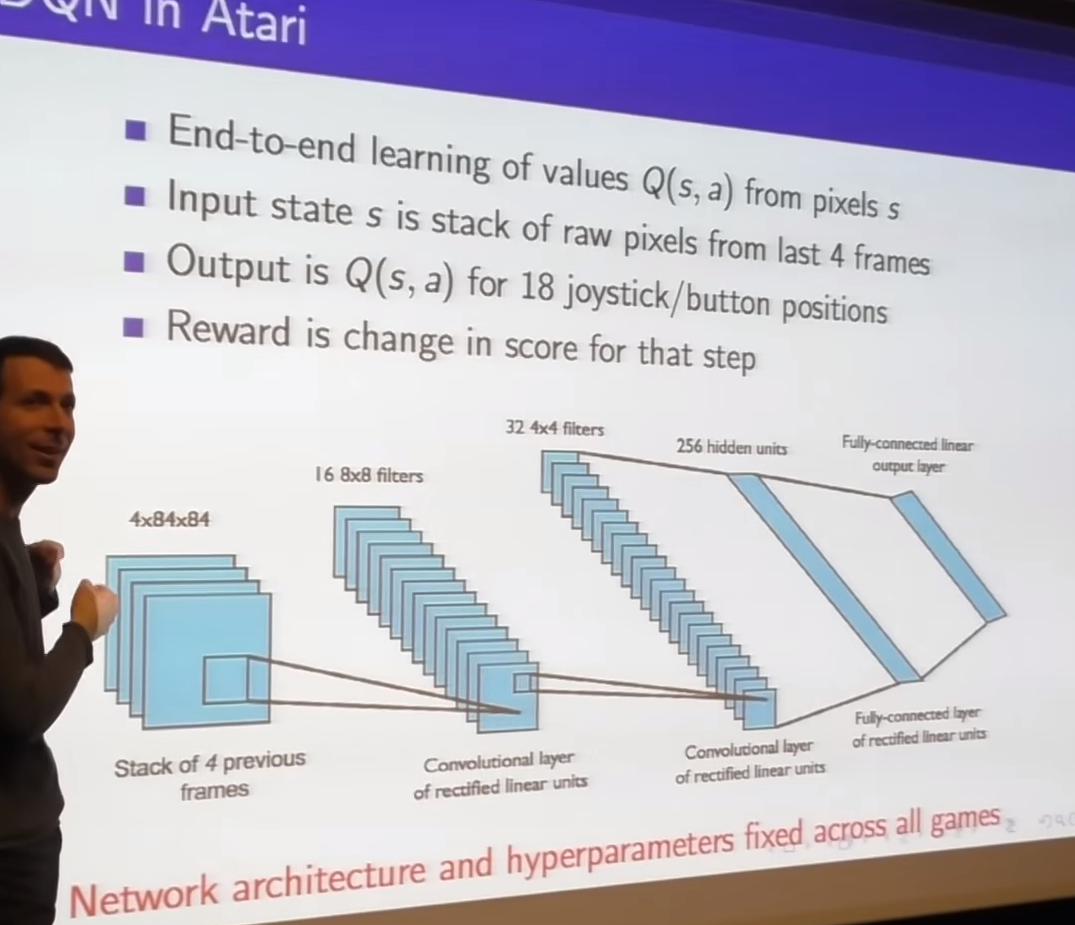
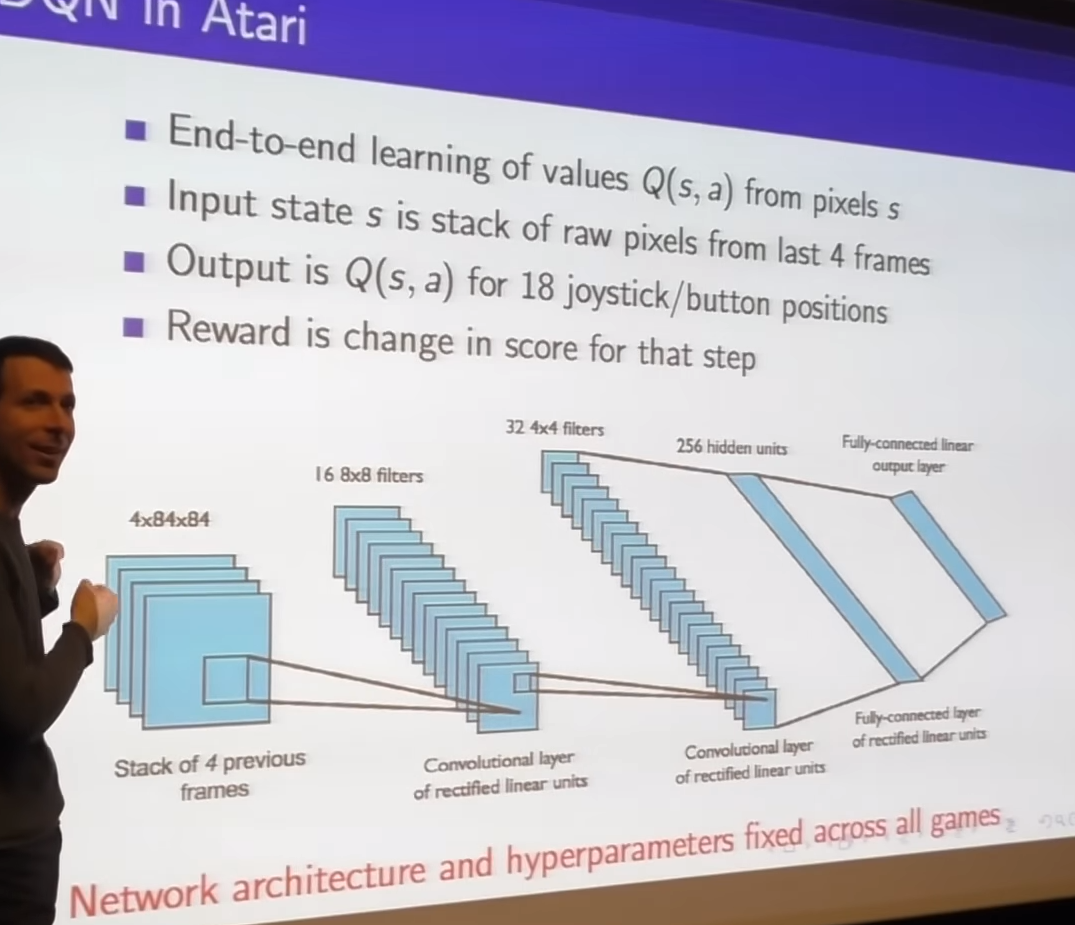
- convolutional network
-
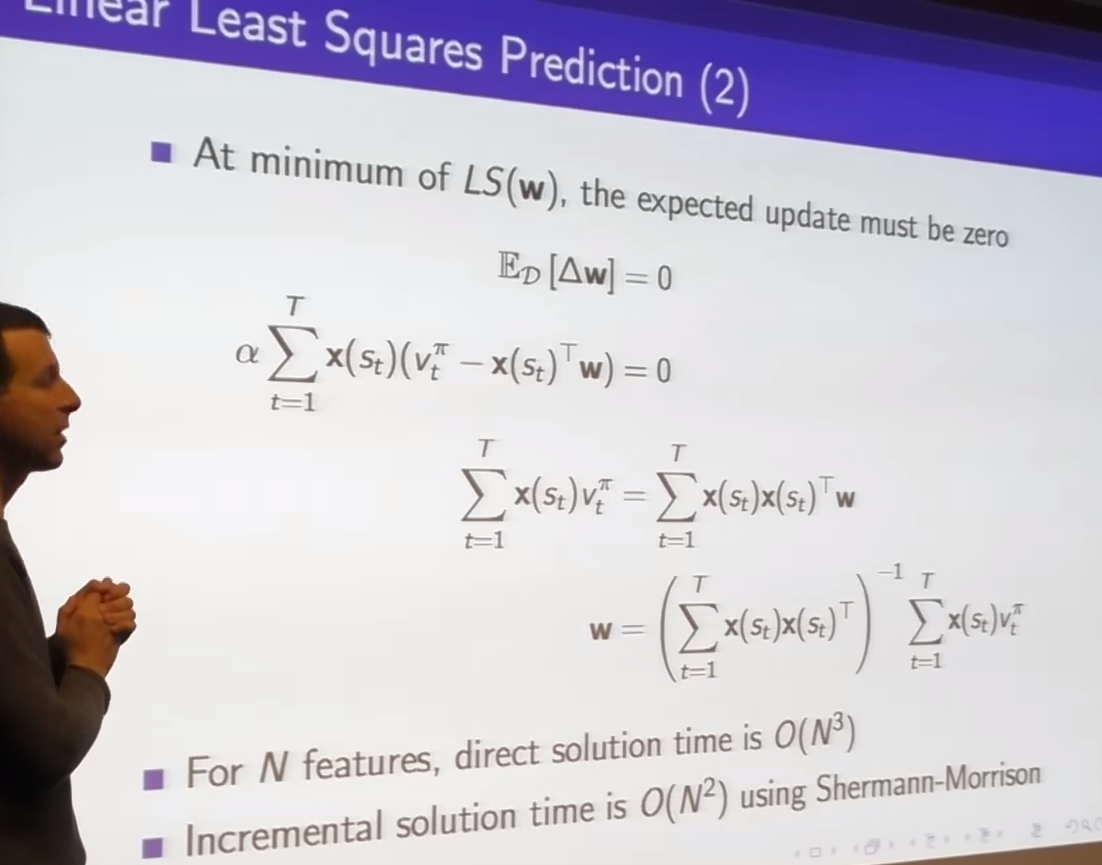
we wouldn't make change anymore, we reached to minima
-
matrix calculation cost depends on features
- still have issue