※ ORB SLAM과 ORB SLAM3 논문의 내용을 분석하였으며,
혹시 잘못된 부분이 있다면 지적해주시면 감사하겠습니다 🤗
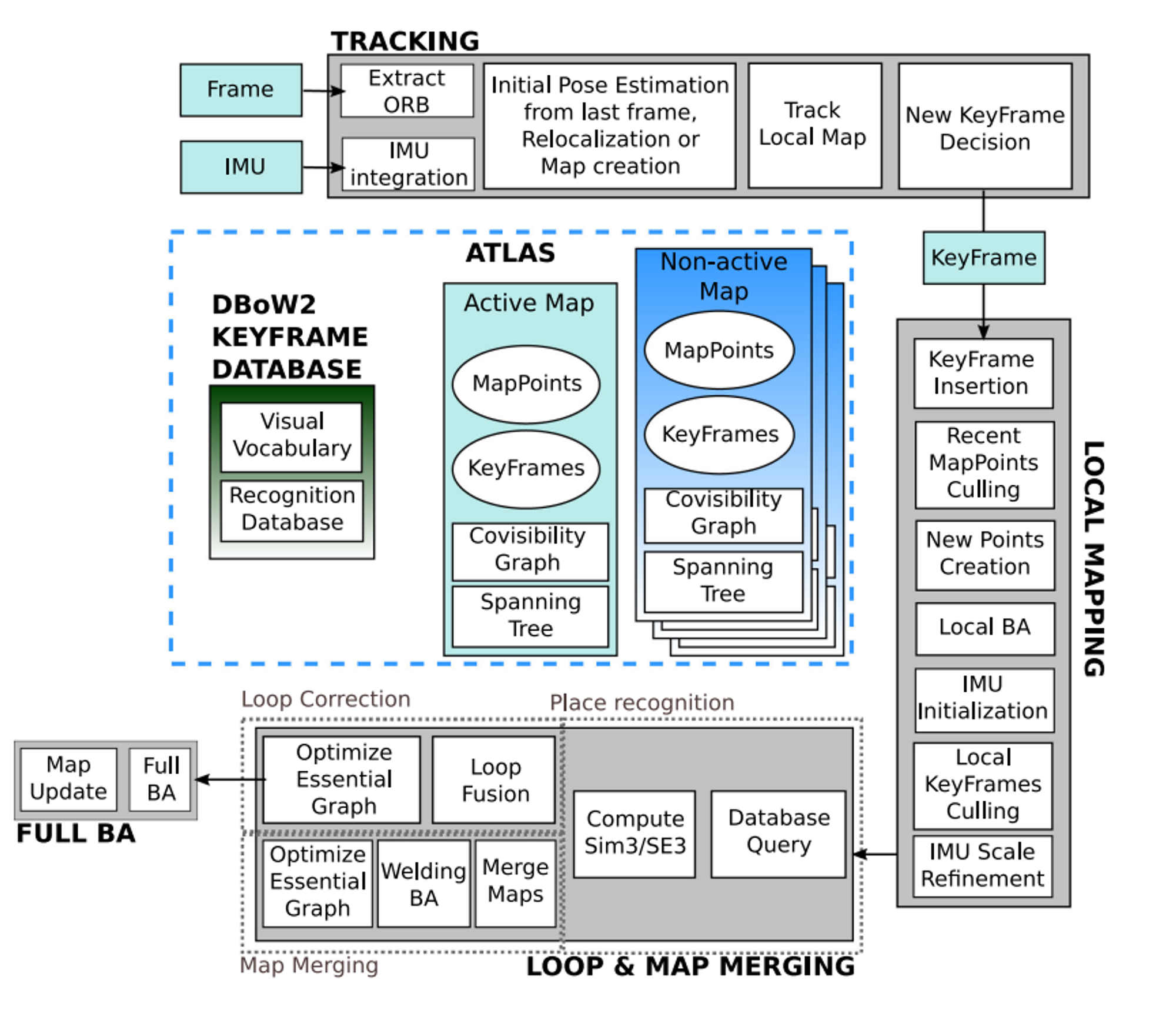
Local Mapping
: Local Mapping Thread에서는 아래의 과정이 수행됩니다.
-
KeyFrame insertion
-
Recent Map Points culling
-
New points creation
-
IMU intialization
-
Local KeyFrames culling
-
IMU Scale Refinement
※ new keyframe을 K_i로 정의
1. KeyFrame insertion
-
K_i에 대한 노드를 covisibility graph에 추가하고, spanning tree를 업데이트한다.
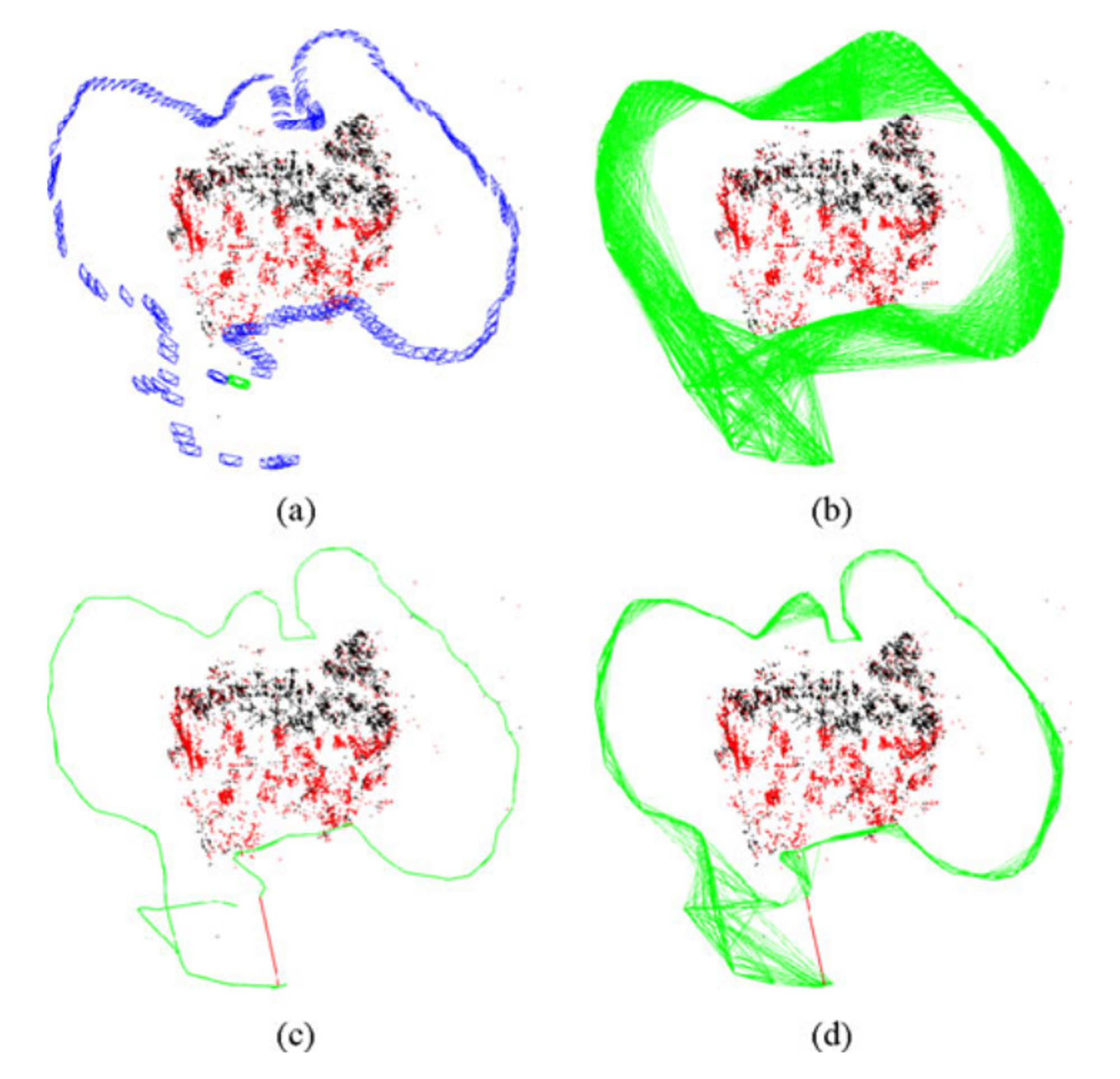 (a) keyframes (b) covisibility graph (c) spanning tree (d) essential graph
(a) keyframes (b) covisibility graph (c) spanning tree (d) essential graph
-
keyframe의 bags of words를 계산한다.
2. Recent Map Points culling
: Map points로 유지되기 위해서는 3개의 keyframe 동안 아래 조건을 만족해야 한다.
-
해당 map point가 있다고 추측되는 frame의 25% 이상에서 추적되어야 한다.
-
map point가 생성된 후, 최소 3개 keyframes에서 관찰되어야 한다.
3. New points creation
-
K_i의 ORB feature와 covisibility graph K_c에 있는 ORB feature 간 triangulation을 통해 map point 위치를 추정
-
K_i의 feature 중 매치되지 않은 feature에 대해서는 동일한 bag of words에 속한 keyframes의 map point와 매칭
-
Local BA
: K_i와 K_c, 그리고 K_i와 K_c에 존재하는 모든 map points를 최적화
→ outlier로 생각되는 map points는 제거
4. IMU intialization
: IMU 변수(속도, 중력 방향, IMU 편향)에 대한 좋은 초기값을 얻는 과정
-
visual-only MAP estimation
: Monocular SLAM을 통해 pose 값(T_k)을 얻음
-
Intertial-only MAP estimation
: Inertial 측정 값을 기반으로 사전에 정의된 모델을 사용하여 시스템의 초기 pose, 속도, 편향과 중력 방향을 추정
-
visual-inertial MAP estimation
 → inertial and visual 파라미터를 얻고 나면, reprojection error(우항)와 IMU residuals(좌항)를 cost로 joint visual-inertial optimization 수행
→ inertial and visual 파라미터를 얻고 나면, reprojection error(우항)와 IMU residuals(좌항)를 cost로 joint visual-inertial optimization 수행
5. Local KeyFrames culling
: keyframe 내 90% 이상의 map points가 다른 3개 이상의 keyframe에서 보이면 해당 keyframe은 제거
6. IMU Scale Refinement
-
느린 운동을 하고 있을 때, 충분한 센서 값이 제공되지 못하면서 IMU 초기화가 수렴하지 못한다.
-
이 때, 초기화 변수에서 IMU 편향 값을 이전에 추정된 값으로 고정하고, 스케일과 중력 방향만 추정
→ 편향 값을 고정하면 노이즈 영향과 계산 복잡도 감소
