ROS2
1.ROS2 with turtlesim (feat. zsh)
Nodes/Topics (all)Debug Hide 해제동그라미: node네모: topic
2023년 11월 2일
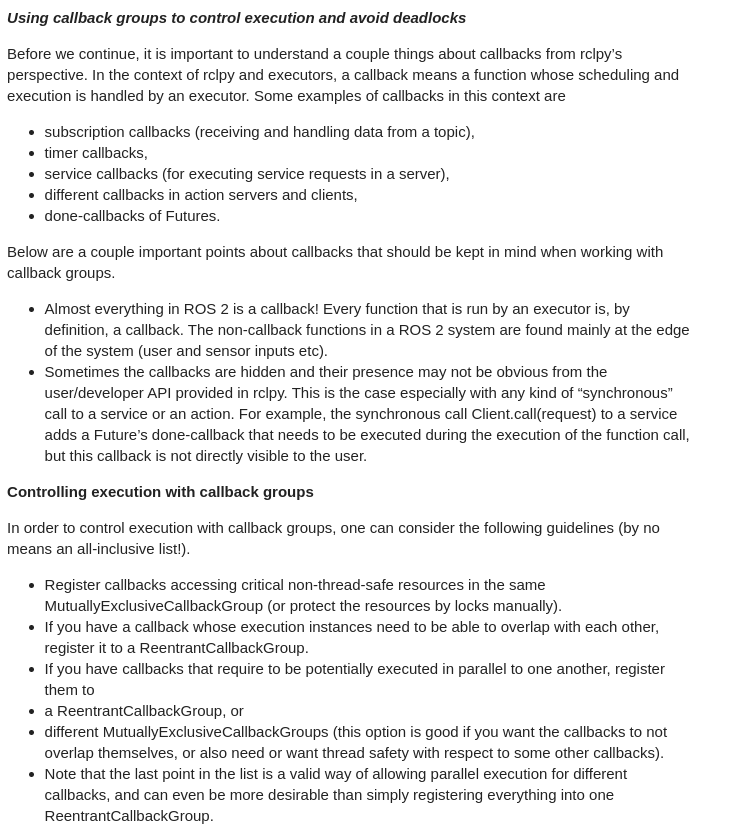
2.ros2 call vs call_async
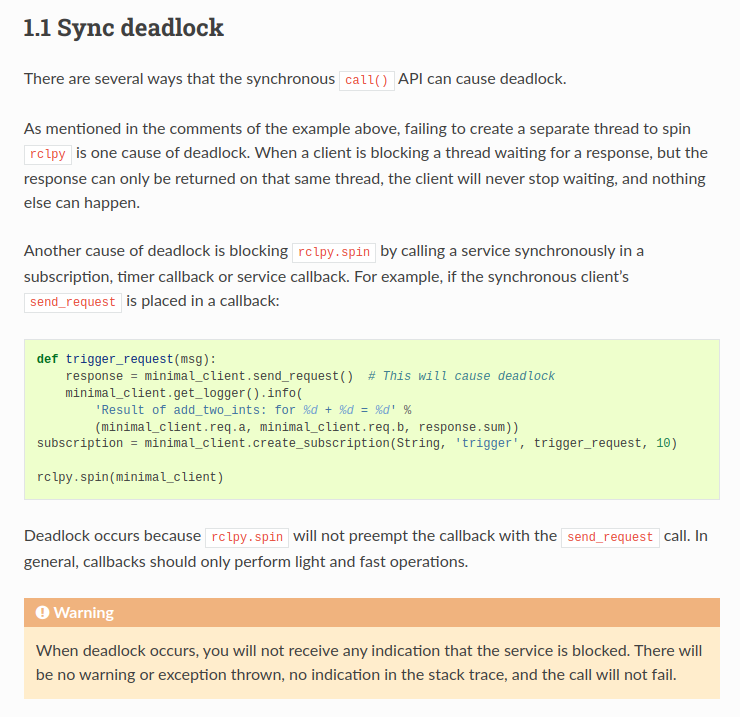
참고: https://docs.ros.org/en/foxy/How-To-Guides/Sync-Vs-Async.htmlcall() API는 deadlock을 발생시킬 수 있고, deadlock 발생 시 service가 멈췄다(blocked)는 것을 알려주지도 않
2023년 11월 13일
3.URDF with Gazebo
2023년 11월 21일
4.로봇의 생성 위치 수정, 2개 지점 왕복시키기
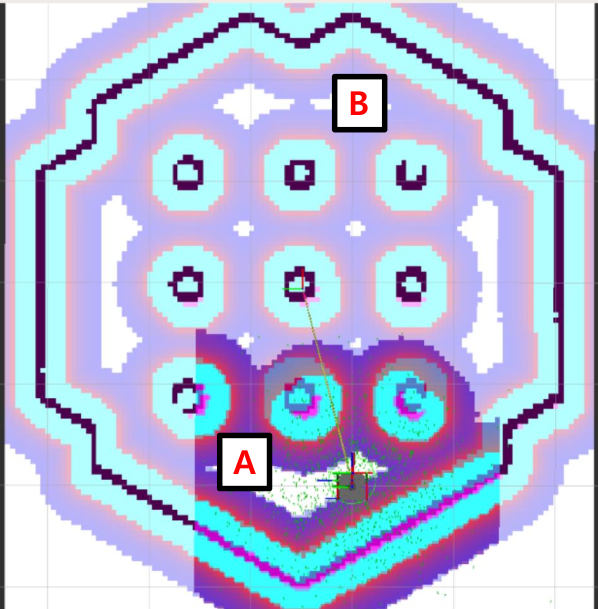
문제 풀이에 핑크랩의 미니봇 프로젝트를 사용했습니다.참고자료: https://navigation.ros.org/commander_api/index.htmlgazebo_ros의 spawn_robot에서 생성 위치를 설정 가능x, y를 원하는 위치에 맞게 수정ya
2023년 12월 22일
5.MultiThreadedExecutor in ROS2
UI에서 topic subscribe가 안 되어서, 구글링 중 발견한 내용(https://robotics.stackexchange.com/questions/100861/using-qt-designer-and-ros2-together-for-a-gui)을 참고해
2024년 3월 4일