yun5.log
로그인
yun5.log
로그인
ros2 call vs call_async
yun
·
2023년 11월 13일
팔로우
0
async
call
ros2
ROS2
목록 보기
2/5
참고:
https://docs.ros.org/en/foxy/How-To-Guides/Sync-Vs-Async.html
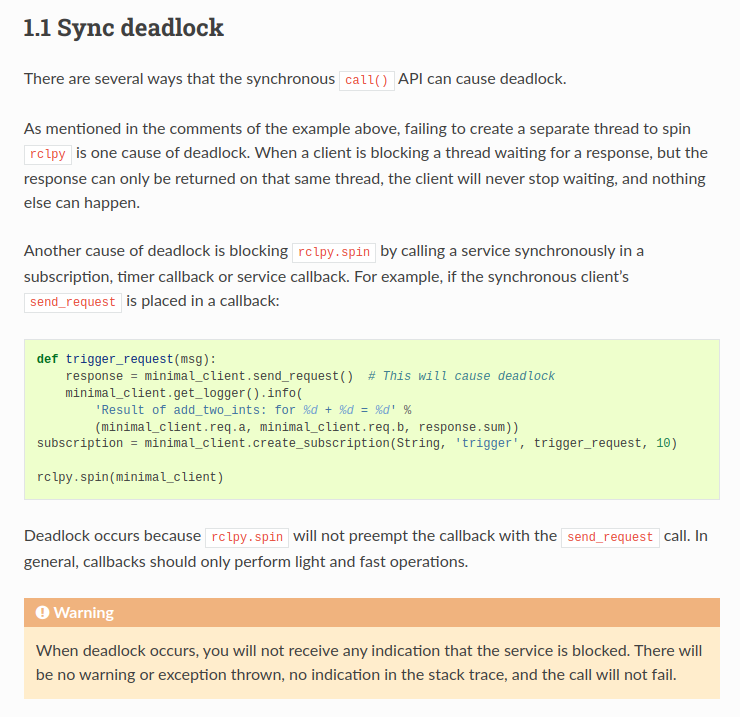
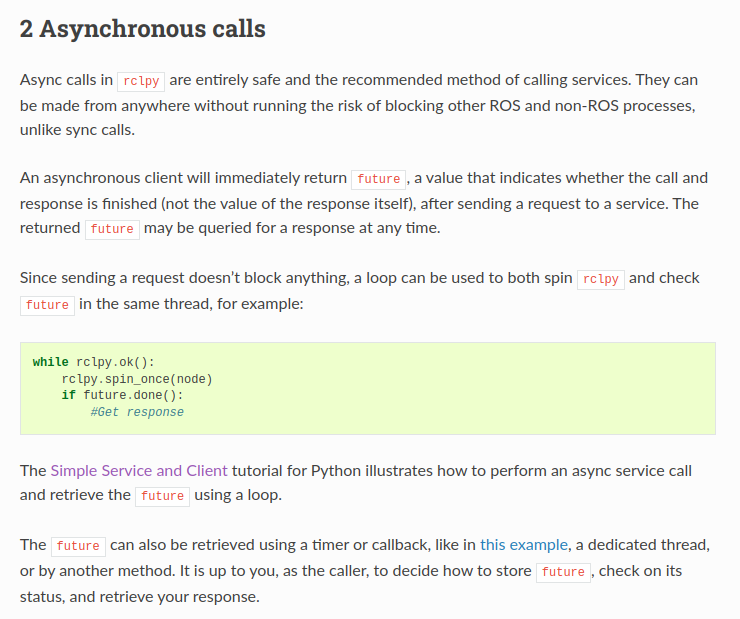
call() API는 deadlock을 발생시킬 수 있고, deadlock 발생 시 service가 멈췄다(blocked)는 것을 알려주지도 않는다. call_async를 사용할 것
yun
팔로우
이전 포스트
ROS2 with turtlesim (feat. zsh)
다음 포스트
URDF with Gazebo
0개의 댓글
댓글 작성