ROS1과의 차이점
- 산업표준 통신 DDS 사용
- DDS: Data Distribution Service 데이터 분산 서비스
- UDP 기반의 신뢰성 있는 멀티캐스트(Reliable multicast) 구현
- QoS(Quality of Services): 노드 간의 DDS 통신 옵션 설정 가능
- 보안 이슈 해결: DDS-Security 적용
- Python3 지원 (3.5 이상 버전 필요)
- 개별 빌드 필요 (cf. ROS: CMake context 하나로 여러 패키지 빌드 가능)
- devel space 부재: 모든 패키지는 빌드 후에 install이 되어야 사용 가능
서비스와 토픽
-
서비스: 요청과 응답이 1:1 ex) 전원 on/off, 모터 on/off 등
-
서비스 인터페이스 확인
[형식]ros2 interface show [node]/srv/[service][예시]
ros2 interface show turtlesim/srv/TeleportAbsolute[조회결과 형식]
Request --- Response[조회결과 예시] *turtlesim/srv/TeleportAbsolute
float32 x float32 y float32 theta ---- 위 예시에서는 요청 시 float32 타입의 x(pitch), float32 타입의 y(yaw), float32 타입의 theta(roll)가 필요하고, 응답값은 없다.
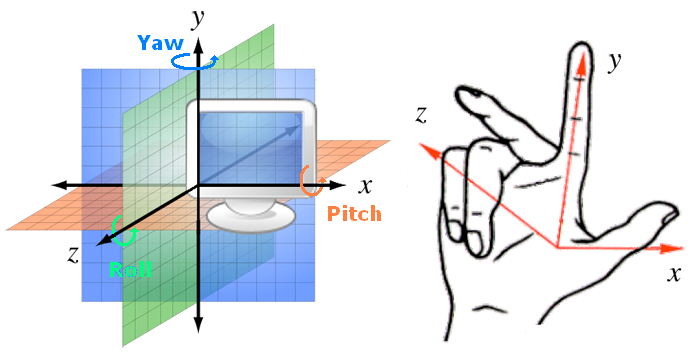
- theta는 반시계 방향(Counter Clock Wise)
- 각도 단위는 radian[2π]으로 작성
- 위 예시에서는 요청 시 float32 타입의 x(pitch), float32 타입의 y(yaw), float32 타입의 theta(roll)가 필요하고, 응답값은 없다.
-
-
토픽: 연속 동작 ex) 현재 위치 업데이트
- 토픽 정보 확인
[형식]
[예시]ros2 topic info [node]/[topic]
[조회결과 예시]ros2 topic info /turtle1/cmd_velType: geometry_msgs/msg/Twist Publisher count: 0 Subscription count: 2
- 토픽 정보 확인
rqt_graph
- ROS computation graph를 시각화하는 GUI 플러그인 제공
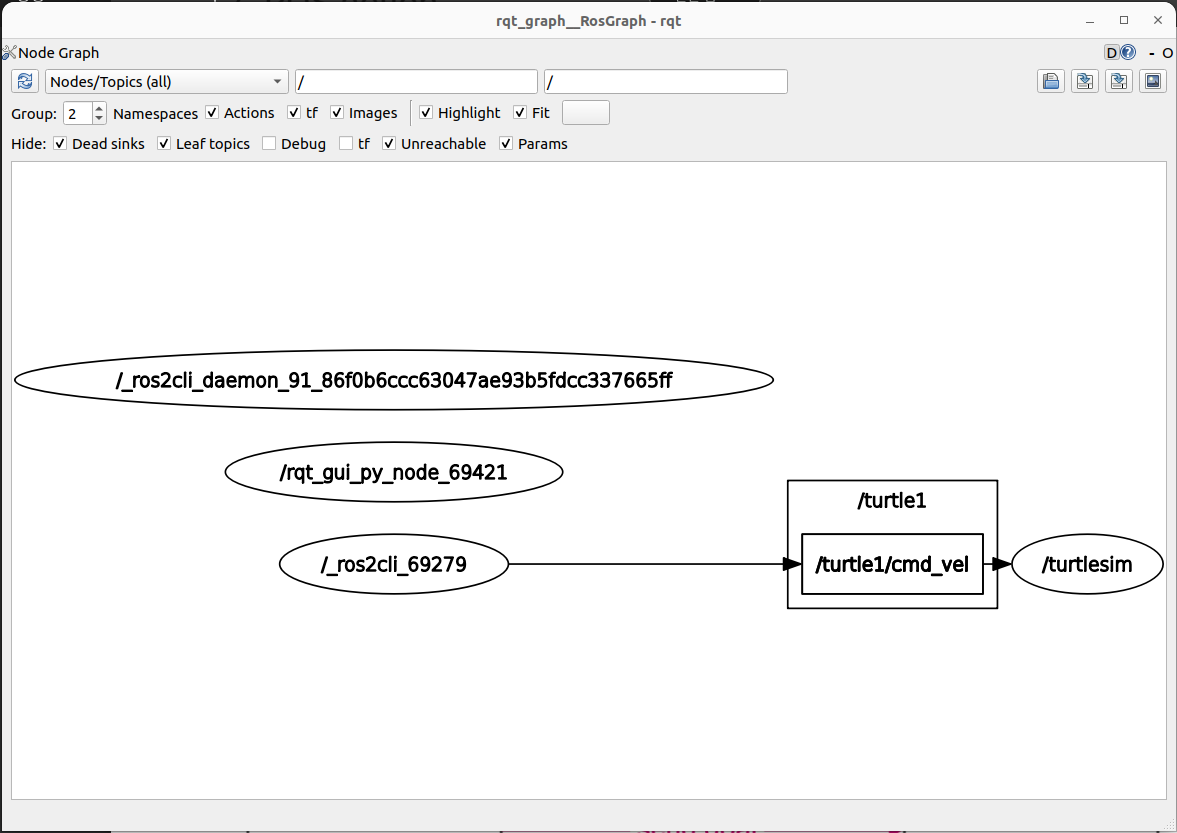
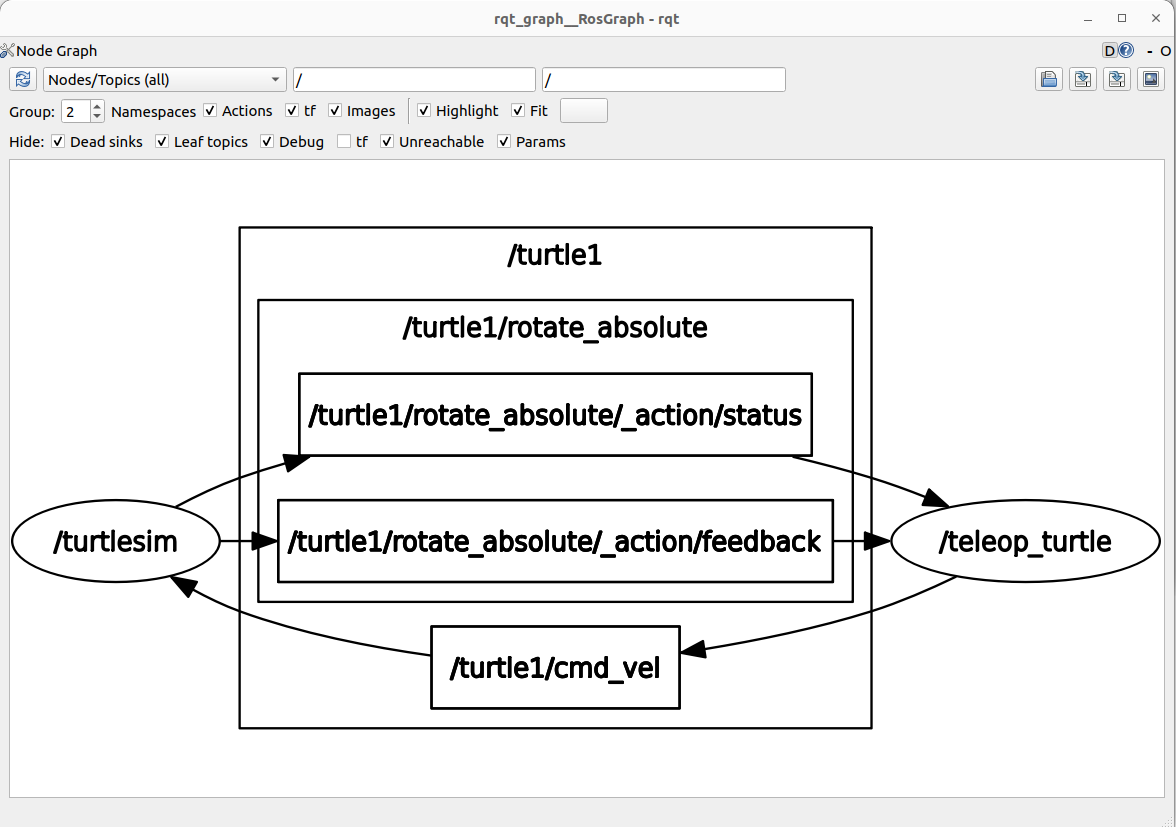
- 보는 법
- Nodes/Topics (all)
- Debug Hide 해제
- ◯: node
- ▭: topic
zsh에서 ros2 명령어 자동완성 안될 때
autoload bashcompinit
bashcompinit
eval "$(register-python-argcomplete3 ros2)"
eval "$(register-python-argcomplete3 colcon)"~/.zshrc에 위 내용 추가 후 source ~/.zshrc
참고자료
- https://design.ros2.org/articles/changes.html
- https://ai-sinq.tistory.com/entry/ROS2%EC%99%80-DDS%EB%9E%80
- https://wiki.ros.org/rqt_graph
- https://lightrun.com/answers/ros2-ros2cli-autocomplete-fails-while-using-zsh
- https://youtu.be/5hVdOAsdDcM?feature=shared
- https://purebasic.developpez.com/documentation/engine3d/index.html
